## 差速AGV

**控制接口:**
> * 寻磁:F32输入接口;
> * 左轮速度:F32输出接口,控制左轮速度;
> * 右轮速度:F32输出接口,控制右轮速度;
> * X坐标:F32输入接口,反馈X坐标值;
> * Y坐标:F32输入接口,反馈Y坐标值;
> * 旋转角度:F32输入接口,反馈旋转角度值;
> * 前避障:DI接口,车头触碰物体时,反馈灯亮起;
> * 后避障:DI接口,车尾触碰物体时,反馈灯亮起;
> * RFID:F32输入接口;
> * 急停按钮:DI接口,使小车急停;
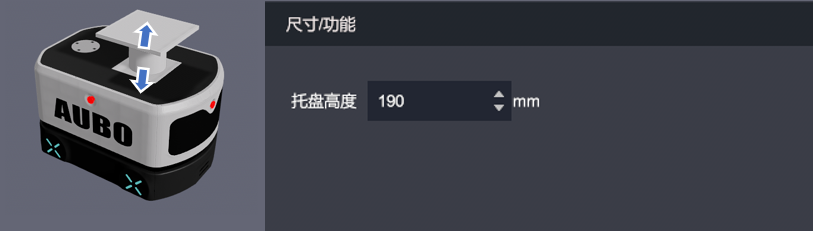
## AGV升降托盘

**模型功能:**
> 支架:工字型底座、L型底座;
> 支架长度:50~1000mm;
> 板块大小:300*300 ~ 1000*1000mm;
**控制接口:**
> * X伺服:电机接口,控制X轴电机运动;
> * X-负限位:DI接口,当X轴物体到达负限位时,模拟控制处X-负限位图标亮起;
> * X-0限位:DI接口,当X轴物体到达0限位时,模拟控制处X-0限位图标亮起;
> * X-正限位:DI接口,当X轴物体到达正限位时,模拟控制处X-正限位图标亮起;
> * X编码:F32输入接口,X电机角度值反馈;
> * 夹具使能:DO接口,打开后夹具使能;
> * 光电反馈:Di接口,检测到物料使,反馈图标亮起;
## AGV背负皮带

**模型功能:**
> 高度:50~500mm;
**控制接口:**
> * 使能:DO接口,打开后皮带开始运转;
> * 方向:DO接口,打开后皮带反向运转;
> * 速度控制:F32输出接口,控制皮带速度;
> * 夹具使能:DO接口,打开后夹具使能;
> * 光电反馈:DI接口,物体接触时,反馈图标亮起;
## 复合AGV
**模型功能:**
>托盘 高度:-10~9999mm;
**控制接口:**
> * 左轮速度:F32输出接口,控制左轮速度;
> * 右轮速度:F32输出接口,控制右轮速度;
> * X坐标:F32输入接口,反馈X坐标值;
> * Y坐标:F32输入接口,反馈Y坐标值;
> * 旋转角度:F32输入接口,反馈旋转角度值;
> * 前测距:F32输入接口,反馈车前距离数值;
> * 避障:DI接口,车触碰物体时,反馈灯亮起;
> * RFID:F32输入接口;
> * 急停按钮:DI接口,使小车急停;
## 叉车AGV
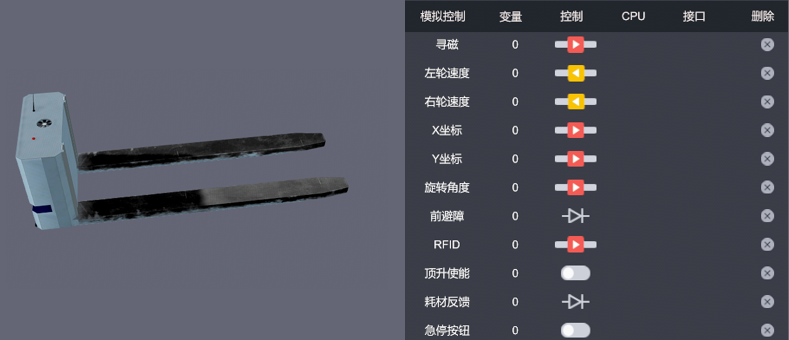
**控制接口:**
> * 寻磁:F32输入接口;
> * 左轮速度:F32输出接口,控制左轮速度;
> * 右轮速度:F32输出接口,控制右轮速度;
> * X坐标:F32输入接口,反馈X坐标值;
> * Y坐标:F32输入接口,反馈Y坐标值;
> * 旋转角度:F32输入接口,反馈旋转角度值;
> * 前避障:DI接口,车头触碰物体时,反馈灯亮起;
> * RFID:F32输入接口;
> * 升顶使能:DO接口,打开后叉子升起;
> * 耗材反馈:DI接口,接触到物体时,反馈图标亮起;
> * 急停按钮:DI接口,使小车急停;
## 叉车AGV
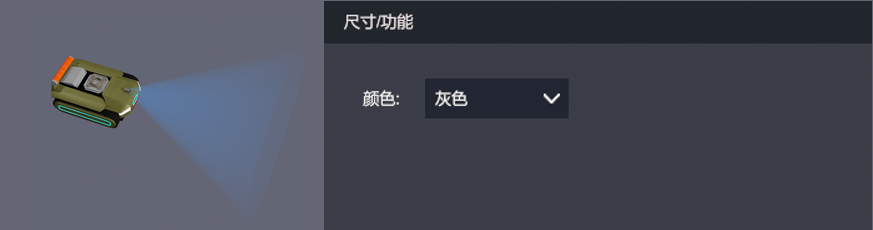
**模型功能:**
>颜色:灰色、红色、绿色;
**控制接口:**
> * 寻磁:F32输入接口;
> * 左轮速度:F32输出接口,控制左轮速度;
> * 右轮速度:F32输出接口,控制右轮速度;
> * X坐标:F32输入接口,反馈X坐标值;
> * Y坐标:F32输入接口,反馈Y坐标值;
> * 旋转角度:F32输入接口,反馈旋转角度值;
> * 前避障:DI接口,车头触碰物体时,反馈灯亮起;
> * 后避障:DI接口,车尾触碰物体时,反馈灯亮起;
> * RFID:F32输入接口;
> * 急停按钮:DI接口,使小车急停;
> * 血量反馈:F32输入接口,反馈机甲血量;
## RFID
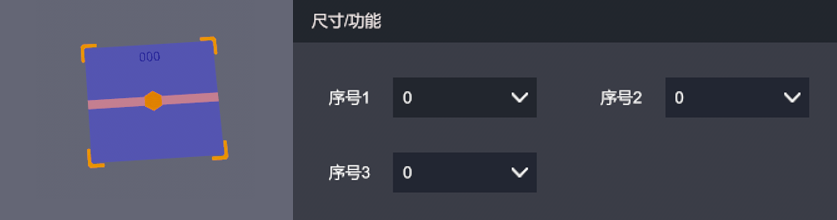
**模型功能:**
>序号1:1~9;
>序号2:1~9;
>序号3:1~9;
## 直线轨道
**模型功能:**
>长度:1~18M;
## 其他轨道
90°转向轨道

分叉轨道

T型分叉轨道

Y型分叉轨道

