
一讲,我们描述了一个某种程度上可以当成智能指针用的类 shape\_wrapper。使用那个智能指针,可以简化资源的管理,从根本上消除资源(包括内存)泄漏的可能性。这一讲我们就来进一步讲解,如何将 shape\_wrapper 改造成一个完整的智能指针。你会看到,智能指针本质上并不神秘,其实就是 RAII 资源管理功能的自然展现而已。在学完这一讲之后,你应该会对 C++ 的 unique\_ptr 和 shared\_ptr 的功能非常熟悉了。同时,如果你今后要创建类似的资源管理类,也不会是一件难事。
```
class shape_wrapper {
public:
explicit shape_wrapper(
shape* ptr = nullptr)
: ptr_(ptr) {}
~shape_wrapper()
{
delete ptr_;
}
shape* get() const { return ptr_; }
private:
shape* ptr_;
};
```
这个类可以完成智能指针的最基本的功能:对超出作用域的对象进行释放。但它缺了点东西:
1. 这个类只适用于 shape 类
2. 该类对象的行为不够像指针
3. 拷贝该类对象会引发程序行为异常下面我们来逐一看一下怎么弥补这些问题。
## 模板化和易用性
要让这个类能够包装任意类型的指针,我们需要把它变成一个类模板。这实际上相当容易:
```
template <typename T>
class smart_ptr {
public:
explicit smart_ptr(T* ptr = nullptr)
: ptr_(ptr) {}
~smart_ptr()
{
delete ptr_;
}
T* get() const { return ptr_; }
private:
T* ptr_;
};
```
和 shape_wrapper 比较一下,我们就是在开头增加模板声明 template <typename T>,然后把代码中的 shape 替换成模板参数 T 而已。这些修改非常简单自然吧?模板本质上并不是一个很复杂的概念。这个模板使用也很简单,把原来的 shape_wrapper 改成 smart_ptr<shape> 就行。
目前这个 smart_ptr 的行为还是和指针有点差异的:
* 它不能用 * 运算符解引用
* 它不能用 -> 运算符指向对象成员
* 它不能像指针一样用在布尔表达式里
不过,这些问题也相当容易解决,加几个成员函数就可以:
```
template <typename T>
class smart_ptr {
public:
…
T& operator*() const { return *ptr_; }
T* operator->() const { return ptr_; }
operator bool() const { return ptr_; }
}
```
## 拷贝构造和赋值
拷贝构造和赋值,我们暂且简称为拷贝,这是个比较复杂的问题了。关键还不是实现问题,而是我们该如何定义其行为。假设有下面的代码:
```
smart_ptr<shape> ptr1{create_shape(shape_type::circle)};
smart_ptr<shape> ptr2{ptr1};
```
对于第二行,究竟应当让编译时发生错误,还是可以有一个更合理的行为?我们来逐一检查一下各种可能性。最简单的情况显然是禁止拷贝。我们可以使用下面的代码:
```
template <typename T>
class smart_ptr {
…
smart_ptr(const smart_ptr&)
= delete;
smart_ptr& operator=(const smart_ptr&)
= delete;
…
};
```
禁用这两个函数非常简单,但却解决了一种可能出错的情况。否则,smart\_ptrptr2{ptr1}; 在编译时不会出错,但在运行时却会有未定义行为——由于会对同一内存释放两次,通常情况下会导致程序崩溃。
.
我们是不是可以考虑在拷贝智能指针时把对象拷贝一份?不行,通常人们不会这么用,因为使用智能指针的目的就是要减少对象的拷贝啊。何况,虽然我们的指针类型是 shape,但实际指向的却应该是 circle 或 triangle 之类的对象。在 C++ 里没有像 Java 的 clone 方法这样的约定;一般而言,并没有通用的方法可以通过基类的指针来构造出一个子类的对象来。我们要么试试在拷贝时转移指针的所有权?大致实现如下:
```
template <typename T>
class smart_ptr {
…
smart_ptr(smart_ptr& other)
{
ptr_ = other.release();
}
smart_ptr& operator=(smart_ptr& rhs)
{
smart_ptr(rhs).swap(*this);
return *this;
}
…
T* release()
{
T* ptr = ptr_;
ptr_ = nullptr;
return ptr;
}
void swap(smart_ptr& rhs)
{
using std::swap;
swap(ptr_, rhs.ptr_);
}
…
};
```
在拷贝构造函数中,通过调用 other 的 release 方法来释放它对指针的所有权。在赋值函数中,则通过拷贝构造产生一个临时对象并调用 swap 来交换对指针的所有权。实现上是不复杂的。
如果你学到的赋值函数还有一个类似于 if (this != &rhs) 的判断的话,那种用法更啰嗦,而且异常安全性不够好——如果在赋值过程中发生异常的话,this 对象的内容可能已经被部分破坏了,对象不再处于一个完整的状态。
**上面代码里的这种惯用法(见参考资料 \[1\])则保证了强异常安全性:** 赋值分为拷贝构造和交换两步,异常只可能在第一步发生;而第一步如果发生异常的话,this 对象完全不受任何影响。无论拷贝构造成功与否,结果只有赋值成功和赋值没有效果两种状态,而不会发生因为赋值破坏了当前对象这种场景。
.
如果你觉得这个实现还不错的话,那恭喜你,你达到了 C++ 委员会在 1998 年时的水平:上面给出的语义本质上就是 C++98 的 auto\_ptr 的定义。如果你觉得这个实现很别扭的话,也恭喜你,因为 C++ 委员会也是这么觉得的:auto\_ptr 在 C++17 时已经被正式从 C++ 标准里删除了。
.
上面实现的最大问题是,它的行为会让程序员非常容易犯错。一不小心把它传递给另外一个 smart\_ptr,你就不再拥有这个对象了……
### “移动”指针?
在下一讲我们将完整介绍一下移动语义。这一讲,我们先简单看一下 smart\_ptr 可以如何使用“移动”来改善其行为。我们需要对代码做两处小修改:
```
template <typename T>
class smart_ptr {
…
smart_ptr(smart_ptr&& other)
{
ptr_ = other.release();
}
smart_ptr& operator=(smart_ptr rhs)
{
rhs.swap(*this);
return *this;
}
…
};
```
看到修改的地方了吗?我改了两个地方:
* 把拷贝构造函数中的参数类型 smart\_ptr& 改成了 smart\_ptr&&;现在它成了移动构造函数。
* 把赋值函数中的参数类型 smart\_ptr& 改成了 smart\_ptr,在构造参数时直接生成新的智能指针,从而不再需要在函数体中构造临时对象。现在赋值函数的行为是移动还是拷贝,完全依赖于构造参数时走的是移动构造还是拷贝构造。
根据 C++ 的规则,如果我提供了移动构造函数而没有手动提供拷贝构造函数,那后者自动被禁用(记住,C++ 里那些复杂的规则也是为方便编程而设立的)。于是,我们自然地得到了以下结果:
```
smart_ptr<shape> ptr1{create_shape(shape_type::circle)};
smart_ptr<shape> ptr2{ptr1}; // 编译出错
smart_ptr<shape> ptr3;
ptr3 = ptr1; // 编译出错
ptr3 = std::move(ptr1); // OK,可以
smart_ptr<shape> ptr4{std::move(ptr3)}; // OK,可以
```
这个就自然多了。这也是 C++11 的 unique\_ptr 的基本行为。
.
## 子类指针向基类指针的转换
哦,我撒了一个小谎。不知道你注意到没有,一个 circle\* 是可以隐式转换成 shape\* 的,但上面的 smart\_ptr却无法自动转换成 smart\_ptr。这个行为显然还是不够“自然”。
.
不过,只需要额外加一点模板代码,就能实现这一行为。在我们目前给出的实现里,只需要增加一个构造函数即可——这也算是我们让赋值函数利用构造函数的好处了。
```
template <typename U>
smart_ptr(smart_ptr<U>&& other)
{
ptr_ = other.release();
}
```
这样,我们自然而然利用了指针的转换特性:现在 smart\_ptr可以移动给 smart\_ptr,但不能移动给 smart\_ptr。不正确的转换会在代码编译时直接报错。
.
需要注意,上面这个构造函数不被编译器看作移动构造函数,因而不能自动触发删除拷贝构造函数的行为。如果我们想消除代码重复、删除移动构造函数的话,就需要把拷贝构造函数标记成 = delete 了(见“拷贝构造和赋值”一节)。不过,更通用的方式仍然是同时定义标准的拷贝 / 移动构造函数和所需的模板构造函数。下面的引用计数智能指针里我们就需要这么做。
.
至于非隐式的转换,因为本来就是要写特殊的转换函数的,我们留到这一讲的最后再讨论。
## 引用计数
unique\_ptr 算是一种较为安全的智能指针了。但是,一个对象只能被单个 unique\_ptr 所拥有,这显然不能满足所有使用场合的需求。一种常见的情况是,多个智能指针同时拥有一个对象;当它们全部都失效时,这个对象也同时会被删除。这也就是 shared\_ptr 了。
unique\_ptr 和 shared\_ptr 的主要区别如下图所示:
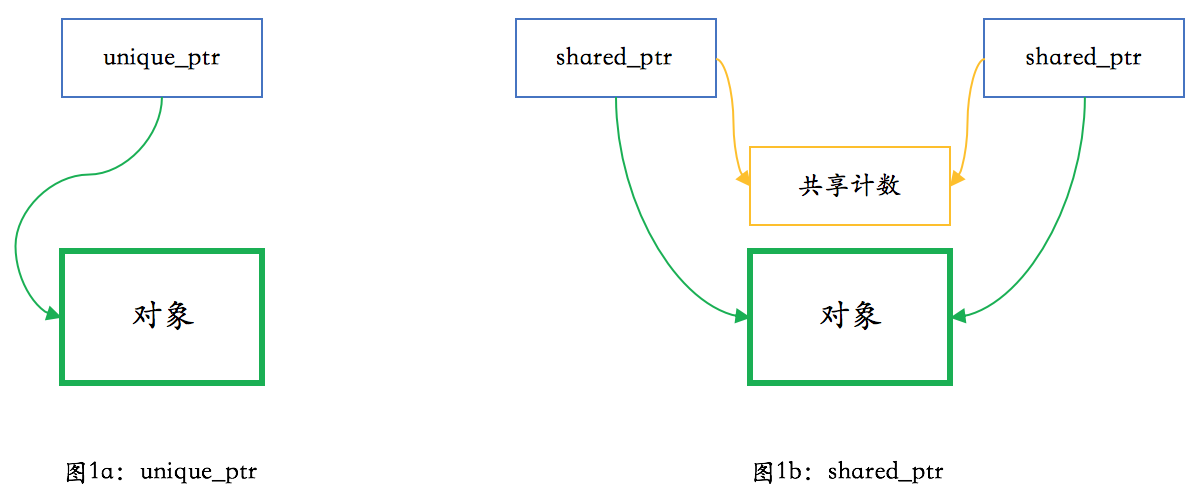
多个不同的 shared\_ptr 不仅可以共享一个对象,在共享同一对象时也需要同时共享同一个计数。当最后一个指向对象(和共享计数)的 shared\_ptr 析构时,它需要删除对象和共享计数。我们下面就来实现一下。我们先来写出共享计数的接口:
```
class shared_count {
public:
shared_count();
void add_count();
long reduce_count();
long get_count() const;
};
```
这个 shared\_count 类除构造函数之外有三个方法:一个增加计数,一个减少计数,一个获取计数。注意上面的接口增加计数不需要返回计数值;但减少计数时需要返回计数值,以供调用者判断是否它已经是最后一个指向共享计数的 shared\_ptr 了。由于真正多线程安全的版本需要用到我们目前还没学到的知识,我们目前先实现一个简单化的版本:
```
class shared_count {
public:
shared_count() : count_(1) {}
void add_count()
{
++count_;
}
long reduce_count()
{
return --count_;
}
long get_count() const
{
return count_;
}
private:
long count_;
};
```
现在我们可以实现我们的引用计数智能指针了。首先是构造函数、析构函数和私有成员变量:
```
template <typename T>
class smart_ptr {
public:
explicit smart_ptr(T* ptr = nullptr)
: ptr_(ptr)
{
if (ptr) {
shared_count_ =
new shared_count();
}
}
~smart_ptr()
{
if (ptr_ &&
!shared_count_
->reduce_count()) {
delete ptr_;
delete shared_count_;
}
}
private:
T* ptr_;
shared_count* shared_count_;
};
```
构造函数跟之前的主要不同点是会构造一个 shared\_count 出来。析构函数在看到 ptr\_ 非空时(此时根据代码逻辑,shared\_count 也必然非空),需要对引用数减一,并在引用数降到零时彻底删除对象和共享计数。原理就是这样,不复杂。当然,我们还有些细节要处理。为了方便实现赋值(及其他一些惯用法),我们需要一个新的 swap 成员函数:
```
void swap(smart_ptr& rhs)
{
using std::swap;
swap(ptr_, rhs.ptr_);
swap(shared_count_,
rhs.shared_count_);
}
```
赋值函数可以跟前面一样,保持不变,但拷贝构造和移动构造函数是需要更新一下的:
```
smart_ptr(const smart_ptr& other)
{
ptr_ = other.ptr_;
if (ptr_) {
other.shared_count_
->add_count();
shared_count_ =
other.shared_count_;
}
}
template <typename U>
smart_ptr(const smart_ptr<U>& other)
{
ptr_ = other.ptr_;
if (ptr_) {
other.shared_count_
->add_count();
shared_count_ =
other.shared_count_;
}
}
template <typename U>
smart_ptr(smart_ptr<U>&& other)
{
ptr_ = other.ptr_;
if (ptr_) {
shared_count_ =
other.shared_count_;
other.ptr_ = nullptr;
}
}
```
除复制指针之外,对于拷贝构造的情况,我们需要在指针非空时把引用数加一,并复制共享计数的指针。对于移动构造的情况,我们不需要调整引用数,直接把 other.ptr\_ 置为空,认为 other 不再指向该共享对象即可。
不过,上面的代码有个问题:它不能正确编译。编译器会报错,像:
> fatal error: ‘ptr\_’ is a private member of ‘smart\_ptr’
错误原因是模板的各个实例间并不天然就有 friend 关系,因而不能互访私有成员 ptr\_ 和 shared\_count\_。我们需要在 smart\_ptr 的定义中显式声明:
```
templatefriend class smart\_ptr;
```
此外,我们之前的实现(类似于单一所有权的 unique\_ptr )中用 release 来手工释放所有权。在目前的引用计数实现中,它就不太合适了,应当删除。但我们要加一个对调试非常有用的函数,返回引用计数值。定义如下:
```
long use_count() const
{
if (ptr_) {
return shared_count_
->get_count();
} else {
return 0;
}
}
```
这就差不多是一个比较完整的引用计数智能指针的实现了。我们可以用下面的代码来验证一下它的功能正常:
```
class shape {
public:
virtual ~shape() {}
};
class circle : public shape {
public:
~circle() { puts("~circle()"); }
};
int main()
{
smart_ptr<circle> ptr1(new circle());
printf("use count of ptr1 is %ld\n",
ptr1.use_count());
smart_ptr<shape> ptr2;
printf("use count of ptr2 was %ld\n",
ptr2.use_count());
ptr2 = ptr1;
printf("use count of ptr2 is now %ld\n",
ptr2.use_count());
if (ptr1) {
puts("ptr1 is not empty");
}
}
```
这段代码的运行结果是:
>
> use count of ptr1 is 1
> use count of ptr2 was 0
> use count of ptr2 is now 2
> ptr1 is not empty~circle()
上面我们可以看到引用计数的变化,以及最后对象被成功删除。指针类型转换对应于 C++ 里的不同的类型强制转换:
* static\_cast
* reinterpret\_cast
* const\_cast
* dynamic\_cast
智能指针需要实现类似的函数模板。实现本身并不复杂,但为了实现这些转换,我们需要添加构造函数,允许在对智能指针内部的指针对象赋值时,使用一个现有的智能指针的共享计数。如下所示:
```
template <typename U>
smart_ptr(const smart_ptr<U>& other,
T* ptr)
{
ptr_ = ptr;
if (ptr_) {
other.shared_count_
->add_count();
shared_count_ =
other.shared_count_;
}
}
```
这样我们就可以实现转换所需的函数模板了。下面实现一个 dynamic\_pointer\_cast 来示例一下:
```
template <typename T, typename U>
smart_ptr<T> dynamic_pointer_cast(
const smart_ptr<U>& other)
{
T* ptr =
dynamic_cast<T*>(other.get());
return smart_ptr<T>(other, ptr);
}
```
在前面的验证代码后面我们可以加上:
```
smart_ptr<circle> ptr3 =
dynamic_pointer_cast<circle>(ptr2);
printf("use count of ptr3 is %ld\n",
ptr3.use_count());
```
编译会正常通过,同时能在输出里看到下面的结果:
> use count of ptr3 is 3
最后,对象仍然能够被正确删除。这说明我们的实现是正确的。代码列表为了方便你参考,下面我给出了一个完整的 smart\_ptr 代码列表:
```
#include <utility> // std::swap
class shared_count {
public:
shared_count() noexcept
: count_(1) {}
void add_count() noexcept
{
++count_;
}
long reduce_count() noexcept
{
return --count_;
}
long get_count() const noexcept
{
return count_;
}
private:
long count_;
};
template <typename T>
class smart_ptr {
public:
template <typename U>
friend class smart_ptr;
explicit smart_ptr(T* ptr = nullptr)
: ptr_(ptr)
{
if (ptr) {
shared_count_ =
new shared_count();
}
}
~smart_ptr()
{
if (ptr_ &&
!shared_count_
->reduce_count()) {
delete ptr_;
delete shared_count_;
}
}
smart_ptr(const smart_ptr& other)
{
ptr_ = other.ptr_;
if (ptr_) {
other.shared_count_
->add_count();
shared_count_ =
other.shared_count_;
}
}
template <typename U>
smart_ptr(const smart_ptr<U>& other) noexcept
{
ptr_ = other.ptr_;
if (ptr_) {
other.shared_count_->add_count();
shared_count_ = other.shared_count_;
}
}
template <typename U>
smart_ptr(smart_ptr<U>&& other) noexcept
{
ptr_ = other.ptr_;
if (ptr_) {
shared_count_ =
other.shared_count_;
other.ptr_ = nullptr;
}
}
template <typename U>
smart_ptr(const smart_ptr<U>& other,
T* ptr) noexcept
{
ptr_ = ptr;
if (ptr_) {
other.shared_count_
->add_count();
shared_count_ =
other.shared_count_;
}
}
smart_ptr&
operator=(smart_ptr rhs) noexcept
{
rhs.swap(*this);
return *this;
}
T* get() const noexcept
{
return ptr_;
}
long use_count() const noexcept
{
if (ptr_) {
return shared_count_
->get_count();
} else {
return 0;
}
}
void swap(smart_ptr& rhs) noexcept
{
using std::swap;
swap(ptr_, rhs.ptr_);
swap(shared_count_,
rhs.shared_count_);
}
T& operator*() const noexcept
{
return *ptr_;
}
T* operator->() const noexcept
{
return ptr_;
}
operator bool() const noexcept
{
return ptr_;
}
private:
T* ptr_;
shared_count* shared_count_;
};
template <typename T>
void swap(smart_ptr<T>& lhs,
smart_ptr<T>& rhs) noexcept
{
lhs.swap(rhs);
}
template <typename T, typename U>
smart_ptr<T> static_pointer_cast(
const smart_ptr<U>& other) noexcept
{
T* ptr = static_cast<T*>(other.get());
return smart_ptr<T>(other, ptr);
}
template <typename T, typename U>
smart_ptr<T> reinterpret_pointer_cast(
const smart_ptr<U>& other) noexcept
{
T* ptr = reinterpret_cast<T*>(other.get());
return smart_ptr<T>(other, ptr);
}
template <typename T, typename U>
smart_ptr<T> const_pointer_cast(
const smart_ptr<U>& other) noexcept
{
T* ptr = const_cast<T*>(other.get());
return smart_ptr<T>(other, ptr);
}
template <typename T, typename U>
smart_ptr<T> dynamic_pointer_cast(
const smart_ptr<U>& other) noexcept
{
T* ptr = dynamic_cast<T*>(other.get());
return smart_ptr<T>(other, ptr);
}
```
如果你足够细心的话,你会发现我在代码里加了不少 noexcept。这对这个智能指针在它的目标场景能正确使用是十分必要的。我们会在下面的几讲里回到这个话题。
## 内容小结
这一讲我们从 shape\_wrapper 出发,实现了一个基本完整的带引用计数的智能指针。这个智能指针跟标准的 shared\_ptr 比,还缺了一些东西(见参考资料 \[2\]),但日常用到的智能指针功能已经包含在内。现在,你应当已经对智能指针有一个较为深入的理解了。
### 课后思考
这里留几个问题,你可以思考一下:
1. 不查阅 shared\_ptr 的文档,你觉得目前 smart\_ptr 应当添加什么功能吗?
2. 你想到的功能在标准的 shared\_ptr 里吗?
3. 你觉得智能指针应该满足什么样的线程安全性?
- C++基础
- 什么是 POD 数据类型?
- 面向对象三大特性五大原则
- 低耦合高内聚
- C++类型转换
- c++仿函数
- C++仿函数了解一下?
- C++对象内存模型
- C++11新特性
- 智能指针
- 动手实现C++的智能指针
- C++ 智能指针 shared_ptr 详解与示例
- 现代 C++:一文读懂智能指针
- Lamda
- c++11多线程
- std::thread
- std::async
- std::promise
- std::future
- C++11 的内存模型
- 初始化列表
- std::bind
- std::tuple
- auto自动类型推导
- 可变参数模板
- 右值引用与移动语义
- 完美转发
- 基于范围的for循环
- C++11之POD类型
- std::enable_if
- C++14/17
- C++20
- 协成
- 模块
- Ranges
- Boost
- boost::circular_buffer
- 使用Boost.Asio编写通信程序
- Boost.Asio C++ 网络编程
- 模板
- 模板特化/偏特化
- C++模板、类模板、函数模板详解都在这里了
- 泛化之美--C++11可变模版参数的妙用
- 模板元编程
- 这是我见过最好的模板元编程文章!