
*****
>[warning] ### 一:确认**电机极性**
>> * 1:通电主板正常显示: 190 ,电机不动。
>> * 2:手动开/关电机,自动检测开限位/关限位。(开/关限位都需要检测)检测时开/关限位电机堵转后会自动停止,
>>这时自检数据会自动保存,自检功能才算完成。
>> * 3:如果手动检测时电机和主板显示数据相反(开:显示数据会不断增加,关:数据会不断减少),
>>这时就需要进入主板菜单 L-D,更改电机极性模式,直到正确为止(标准电机模式为 001 )。
>[warning] ### 二:调试道闸杆**水平**位置和**垂直**位置
>> * 自检完成后,手动开/关试用道闸正常运行时状态,检测道闸杆开/关是否正常,
>> 如果开/关到位有偏差,请到主板菜单 L-6 (关到位偏移值),和 L-9 (开到位偏移值)中调试(根据现场情况调试相对应参数参考参数表调试)。
>[warning] ### 三:调试道闸 开闸/关闸 时的**速度**和运行**平稳**状态。
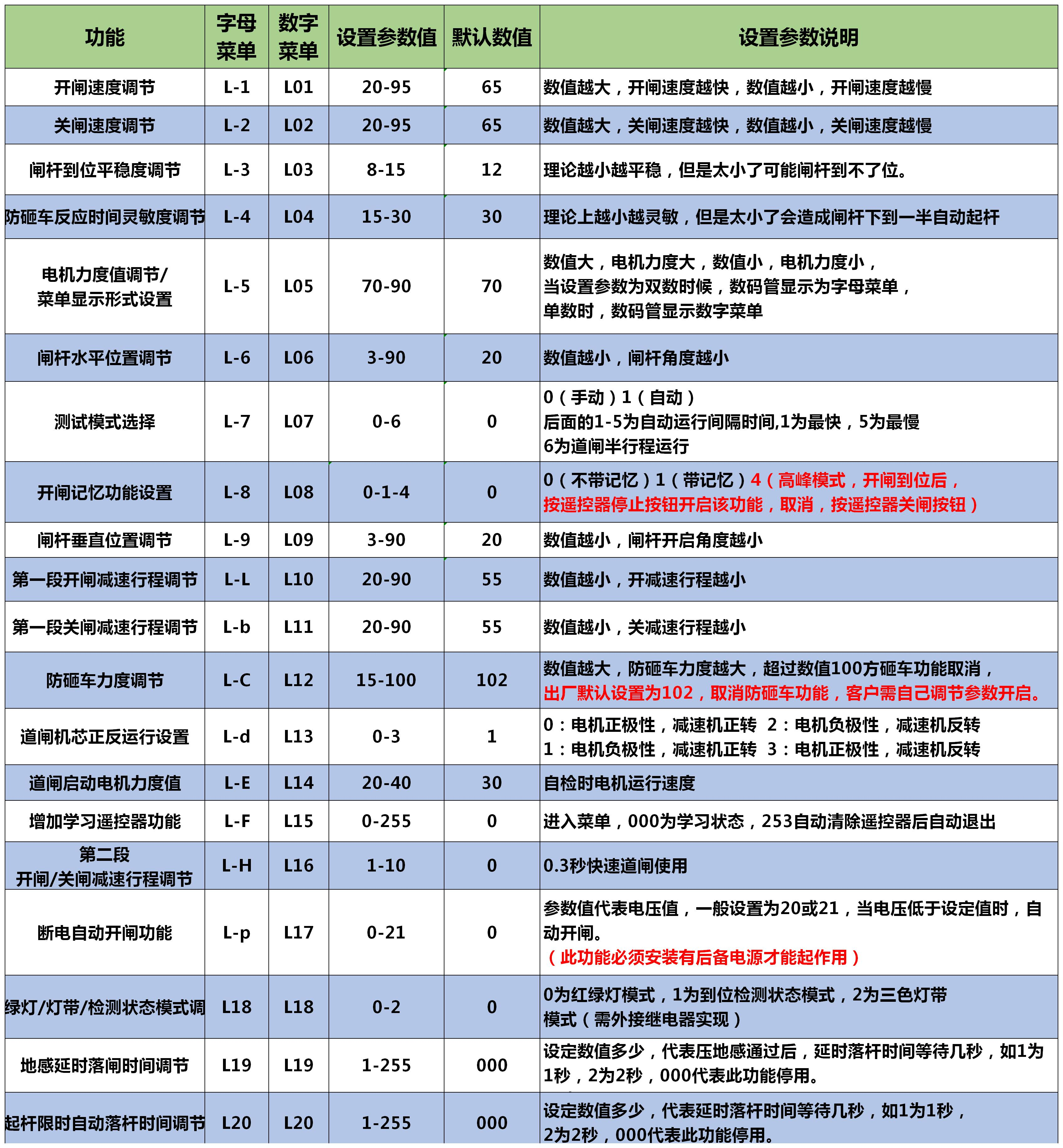
>> * 1:开闸速度 L-1 :数值越大,速度越快。
>> * 2:关闸速度 L-2 :数值越大,速度越快。
>> * 3:开闸减速行程 L-L :数值越大减速距离越大。
>> * 4:关闸减速行程 L-B :数值越大减速距离越大。
>> * 5:开/关减速行程数值越大会影响开/关闸速度,根据现场运行状态实时调整。
>> * 6:开/关闸到位时道闸杆是否晃动,调节 L-3 参数值(根据现场情况调节)。
>> 如参数过小,会出现开/关到位时还没完全到位道闸杆就不动了,如果参数过大,会出现开/关到位杆子晃动。
>[warning] ### 四:遇阻返弹调节
>> * 1: L-4 调节遇阻返弹灵敏度
>> * 2: L-C 调节遇阻返弹力度
>> 如果参数过小,会出现道闸杆开/关到一半时马上返弹回去,根据现场情况调节参数。
*****
>[warning] ### 五:遥控器对码操作
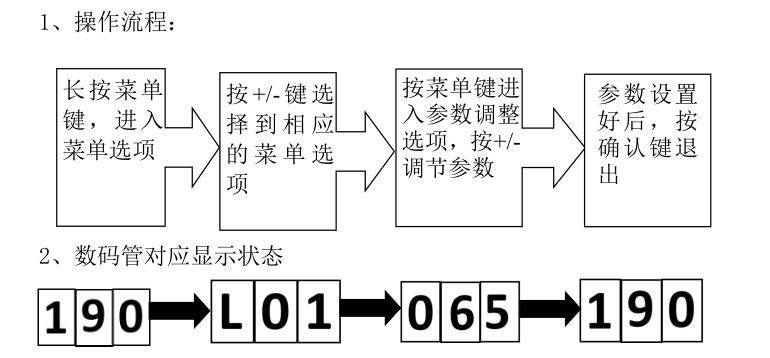
>> * 遥控器配对:进主板菜单到 L-F【L15】项,LED 显示`000`,此时按遥控器上任意按钮,
>> 听到主板滴一声,自动退到菜单选择状态,表示配对成功,然后按保存退出键退出菜单。
>> * 清空遥控器:清空所有配对好的遥控器的操作,进主板菜单到 L-F【L15】项,按一下菜单键,
>> 进入学习状态,将参数调到 `253`,此时会自动退回 L-F【L15】,同时,所有遥控器清空。
> * **注意: 首次学习遥控器之前 , 先清空主板内所有遥控器 , 以免里面存有其他遥控器码,影响正常使用。**
*****
> #### **附:参数表。**
> 
> 
*****
- 前言
- 1、产品型号
- 1-1、GA-317A系列、标准道闸
- 1-2、GA-317A系列、防撞道闸
- 1-3、GA-319A系列、标准道闸
- 1-4、GA-318B高速变频道闸
- 1-5、GA-583空降闸
- 1-6、GA-580广告道闸
- 1-6-a、产品结构
- 1-6-b、安装说明
- 1-7、GA-582广告道闸
- 1-8、GA-327标准直杆道闸
- 1-9、GA-329标准直杆道闸
- 2、设备接线图
- 2-1、交流变频主板(黑色外壳)
- 2-1-a、概序
- 2-1-b、功能参数设置说明
- 2-1-c、故障分析
- 2-2、交流变频主板(蓝色外壳)
- 2-2-a、概序
- 2-2-b、操作面板说明及常用功能操作
- 2-2-c、参数功能表与设置方法
- 2-2-d、故障代码及排除方法
- 2-3、直流无刷主板
- 2-3-a、设置操作
- 2-3-b、上电自检流程
- 2-3-c、主板参数设置操作流程及参数表
- 2-4、广告道闸主板
- 2-4-a、概序
- 2-4-b、调试说明
- 2-4-c、故障分析
- 2-5、标准道闸主板
- 2-5-a、概序
- 2-5-b、安装与调试
- 2-5-c、故障分析
- 3、道闸的基本维护与保养
- 3-1、外部维护保养
- 3-2、内部机芯保养
- 3-3、电路部分保养
- 4、道闸弹簧调试说明(通用)
- 5、安装道闸注意事项