
# 三、Lars-DNS Service开发
## **1) 简介**
负责接收各agent对某modid、cmdid的请求并返回该modid、cmdid下的所有节点,即为agent提供获取路由服务
### 1.1 架构
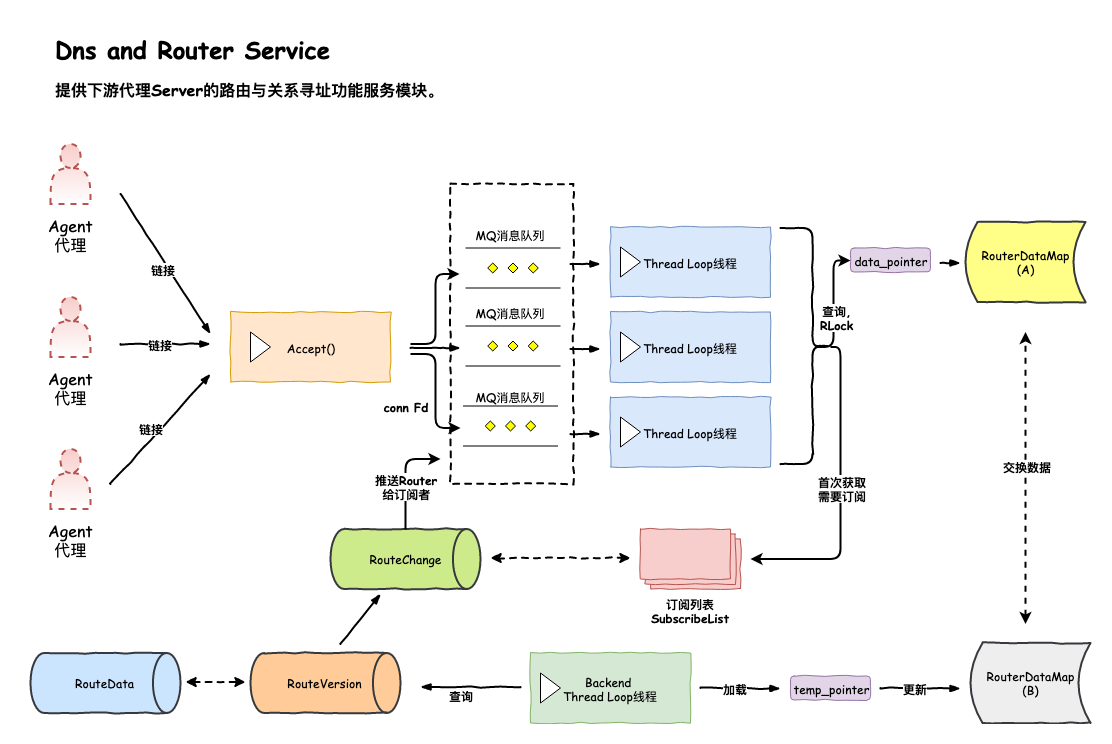
### **1.2 网络模块**
DnsService服务模型采用了one loop per thread TCP服务器,主要是基于Lars-Reactor:
- 主线程Accepter负责接收连接(agent端连接)
- Thread loop们负责处理连接的请求、回复;(agent端发送查询请求,期望获取结果)
### **1.3 双map模型**
DnsServer使用两个map存储路由数据(key = `modid<<32 + cmdid` , value = set of `ip<<32 + port`)
- 一个`RouterDataMap_A`:主数据,查询请求在此map执行
- 另一个`RouterDataMap_B`:后台线程周期性重加载路由到此map,作为最新数据替换掉上一个map
这两个map分别由指针`data_pointer`与`temp_pointer`指向.
### 1.4 Backend Thread守护线程
**dns service还有个业务线程:**
1、负责周期性(default:1s)检查`RouteVersion`表版本号,如有变化,说明`RouteData`有变更,则重加载`RouteData`表内容;然后将`RouteChange`表中被变更的`modid`取出,根据订阅列表查出`modid`被哪些连接订阅后,向所有工作线程发送任务:要求订阅这些`modid`的连接推送`modid`路由到agent
2、此外,还负责周期性(default:8s)重加载`RouteData`表内容
**PS:重加载`RouteData`表内容的细节**
重加载`RouteData`表内容到`temp_pointer`指向的`RouterDataMap_B`,而后上写锁,交换指针`data_pointer`与`temp_pointer`的地址,于是完成了路由数据更新
### **主业务**
1. 服务启动时,`RouteData`表被加载到`data_pointer`指向的`RouterDataMap_A`中, `temp_pointer`指向的`RouterDataMap_B`为空
2. 服务启动后,agent发来Query for 请求某`modid/cmdid`,到其所在Thread Loop上,上读锁查询`data_pointer`指向的`RouterDataMap_A`,返回查询结果;
3. 如果此`modid/cmdid`不存在,则把`agent ip+port`+`moid/cmdid`发送到Backend thread loop1的队列,让其记录到ClientMap
后台线程Backend thread每隔10s清空`temp_pointer`指向的`RouterDataMap_B`,再加载`RouteData`表内容到`temp_pointer`指向的`RouterDataMap_B`,加载成功后交换指针`data_pointer`与`temp_pointer`指针内容,于是完成了路由数据的更新.
---
### 关于作者:
作者:`Aceld(刘丹冰)`
mail: [danbing.at@gmail.com](mailto:danbing.at@gmail.com)
github: [https://github.com/aceld](https://github.com/aceld)
原创书籍: [https://www.kancloud.cn/@aceld](https://www.kancloud.cn/@aceld)

>**原创声明:未经作者允许请勿转载, 如果转载请注明出处**
- 一、Lars系统概述
- 第1章-概述
- 第2章-项目目录构建
- 二、Reactor模型服务器框架
- 第1章-项目结构与V0.1雏形
- 第2章-内存管理与Buffer封装
- 第3章-事件触发EventLoop
- 第4章-链接与消息封装
- 第5章-Client客户端模型
- 第6章-连接管理及限制
- 第7章-消息业务路由分发机制
- 第8章-链接创建/销毁Hook机制
- 第9章-消息任务队列与线程池
- 第10章-配置文件读写功能
- 第11章-udp服务与客户端
- 第12章-数据传输协议protocol buffer
- 第13章-QPS性能测试
- 第14章-异步消息任务机制
- 第15章-链接属性设置功能
- 三、Lars系统之DNSService
- 第1章-Lars-dns简介
- 第2章-数据库创建
- 第3章-项目目录结构及环境构建
- 第4章-Route结构的定义
- 第5章-获取Route信息
- 第6章-Route订阅模式
- 第7章-Backend Thread实时监控
- 四、Lars系统之Report Service
- 第1章-项目概述-数据表及proto3协议定义
- 第2章-获取report上报数据
- 第3章-存储线程池及消息队列
- 五、Lars系统之LoadBalance Agent
- 第1章-项目概述及构建
- 第2章-主模块业务结构搭建
- 第3章-Report与Dns Client设计与实现
- 第4章-负载均衡模块基础设计
- 第5章-负载均衡获取Host主机信息API
- 第6章-负载均衡上报Host主机信息API
- 第7章-过期窗口清理与过载超时(V0.5)
- 第8章-定期拉取最新路由信息(V0.6)
- 第9章-负载均衡获取Route信息API(0.7)
- 第10章-API初始化接口(V0.8)
- 第11章-Lars Agent性能测试工具
- 第12章- Lars启动工具脚本