## 单轴伺服
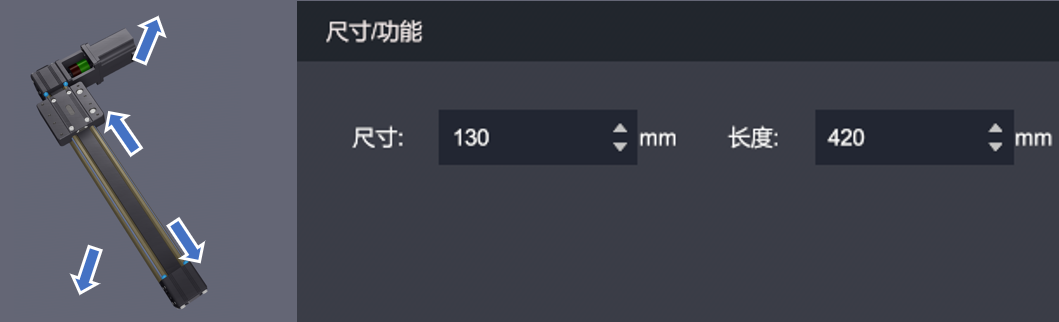
**参数尺寸:**
> 尺寸为0~9999mm;
> 长度为0~9999mm;
**控制接口:**
> * X伺服:电机接口,打开后X轴电机启动;
> * X-负限位:DI接口,当X轴物体到达负限位时,模拟控制处X-负限位图标亮起;
> * X-0限位:DI接口,当X轴物体到达0限位时,模拟控制处X-0限位图标亮起;
> * X-正限位:DI接口,当X轴物体到达正限位时,模拟控制处X-正限位图标亮起;
> * X编码:F32输入接口,X电机角度值反馈;
## 单轴伺服A
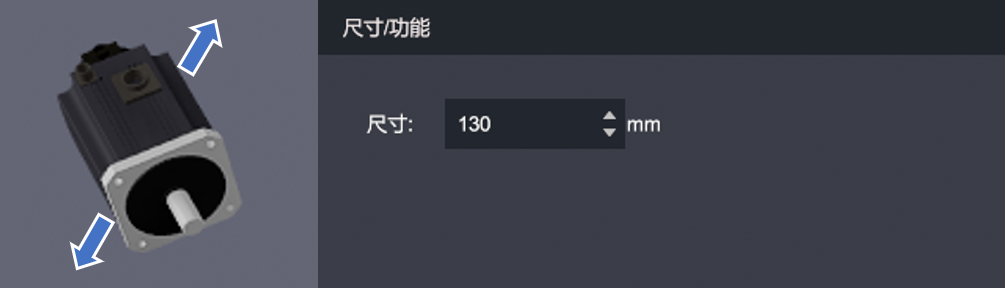
**参数尺寸:**
> 尺寸为0~9999mm;
**控制接口:**
> * 伺服控制:电机接口,打开后电机启动;
> * 伺服控制A:F32输入接口,反馈电机角度值;
## 伺服转盘A
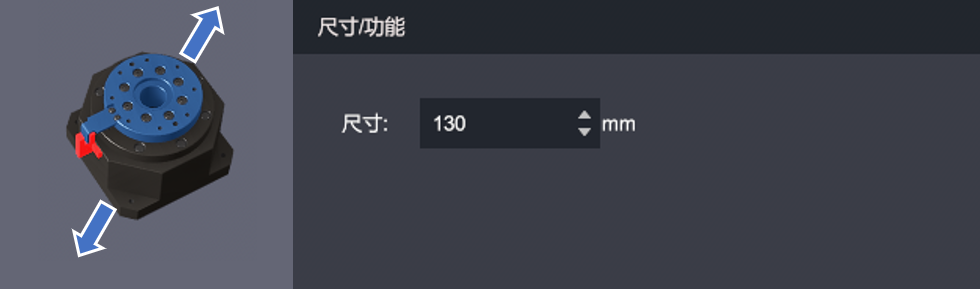
**参数尺寸:**
> 尺寸为0~9999mm;
**控制接口:**
> * 伺服控制:电机接口,打开后电机启动;
> * 伺服控制A:F32输入接口,反馈电机角度值;
> * 光电反馈:DI接口,当转盘在卡口位置时(及初始位置),模拟控制中的光电反馈图标亮起;
## 交流电机
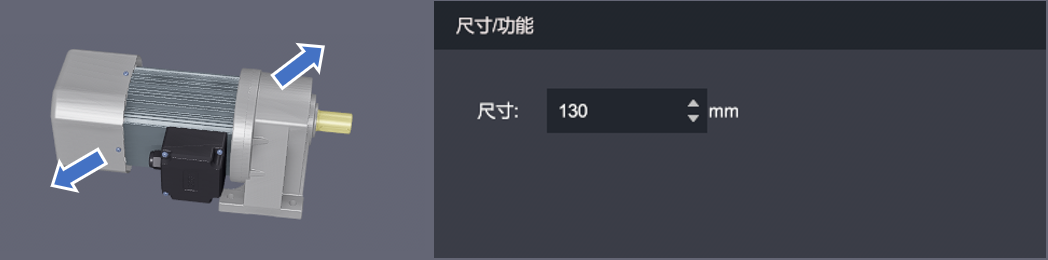
**参数尺寸:**
> 尺寸为0~9999mm;
**控制接口:**
> * 电机使能:DO接口,打开后电机开始运动;
> * 电机方向:DO接口,打开后电机反方向运动;
> * 电机转速:F32输出接口,控制电机转速;
## 主轴电机
**参数尺寸:**
> 尺寸为0~9999mm;
**控制接口:**
> * 电机使能:DO接口,打开后电机开始运动;
> * 电机转速:F32输出接口,控制电机转速;
## 数控加工中心

**参数尺寸:**
> 尺寸为0~9999mm;
> 图片:图片为加工出的图片,软件自带10种不同图片,用户也可以自行进行根目录文件夹进行添加替换;
**控制接口:**
> * 机床开门/关门:DO接口,打开后机床门开启;
> * 机床夹具夹紧:DO接口,打开后机床内部夹具使能;
> * 机床开门反馈:DI接口,机床开门时,模拟控制处机床开门反馈图标亮起;
> * 夹具夹紧反馈:DI接口,夹具使能时,模拟控制处夹具夹紧反馈图标亮起;
> * 机床关门反馈:DI接口,机床关门时,模拟控制处机床关门反馈图标亮起;
> * 使能机床加工:DO接口,开启后,机床开始加工;
> * 急停状态反馈:DI接口,当急停按钮按下时,模拟控制处急停状态反馈图标亮起;
> * 急停使能控制:DO接口,打开后机床急停;
> * 忙闲状态反馈:DI接口,当机床处于忙状态时,模拟控制处忙闲状态反馈图标亮起;
## 数控机床
**参数尺寸:**
> 尺寸为0~9999mm;
**控制接口:**
> * 机床开门/关门:DO接口,打开后机床门开启;
> * 机床开门反馈:DI接口,机床开门时,模拟控制处机床开门反馈图标亮起;
> * 机床夹具夹紧:DO接口,打开后机床内部夹具使能;
> * 夹具夹紧反馈:DI接口,夹具使能时,模拟控制处夹具夹紧反馈图标亮起;
> * 使能机床加工:DO接口,开启后,机床开始加工;
> * 急停状态反馈:DI接口,当急停按钮按下时,模拟控制处急停状态反馈图标亮起;
> * 急停使能控制:DO接口,打开后机床急停;
## 冲压机床
**参数尺寸:**
> 图片:图片为加工出的图片,软件自带10种不同图片,用户也可以自行进行根目录文件夹进行添加替换;
**控制接口:**
> * 耗材反馈:DI接口,当机器内有耗材时,模拟控制处耗材反馈图标亮起;
> * 冲压使能:DO接口,开启后机床启动;
## PID水罐

**参数尺寸:**
> 尺寸为0~9999mm;
**控制接口:**
> * 进水使能:DO接口,开启后水罐进水;
> * 进水流量:F32输出接口,控制进水流量;
> * 出水使能:DO接口,开启后水罐出水;
> * 出水流量:F32输出接口,控制出水流量;
> * 高报警:DI接口,当水位过高时,模拟控制处高报警图标亮起;
> * 低报警:DI接口,当水位过低时,模拟控制处低报警图标亮起;
> * 水位:F32输入接口,反馈当前水位;
## 三轴点胶机
**参数尺寸:**
> 尺寸为600~9999mm;
**控制接口:**
> * X伺服:电机接口,打开后X轴电机启动;
> * X-负限位:DI接口,当X轴物体到达负限位时,模拟控制处X-负限位图标亮起;
> * X-0限位:DI接口,当X轴物体到达0限位时,模拟控制处X-0限位图标亮起;
> * X-正限位:DI接口,当X轴物体到达正限位时,模拟控制处X-正限位图标亮起;
> * Y伺服:电机接口,打开后Y轴电机启动;
> * Y-负限位:DI接口,当Y轴物体到达负限位时,模拟控制处Y-负限位图标亮起;
> * Y-0限位:DI接口,当Y轴物体到达0限位时,模拟控制处Y-0限位图标亮起;
> * Y-正限位:DI接口,当Y轴物体到达正限位时,模拟控制处Y-正限位图标亮起;
> * Z伺服:电机接口,打开后Z轴电机启动;
> * Z负限位:DI接口,当Z轴物体到达负限位时,模拟控制处Z-负限位图标亮起;
> * Z-0限位:DI接口,当Z轴物体到达0限位时,模拟控制处Z-0限位图标亮起;
> * Z-正限位:DI接口,当Z轴物体到达正限位时,模拟控制处Z-正限位图标亮起;
> * 真空吸附:DO接口,打开后吸附空能开启;
> * 点胶使能:DO接口,打开后点胶机出胶;
> * 碰撞反馈:DI接口,当物料耗材碰撞时,模拟控制处碰撞反馈图标亮起;
> * X编码:F32输入接口,X电机角度值反馈;
> * Y编码:F32输入接口,Y电机角度值反馈;
> * Z编码:F32输入接口,Z电机角度值反馈;
## 三坐标测量仪
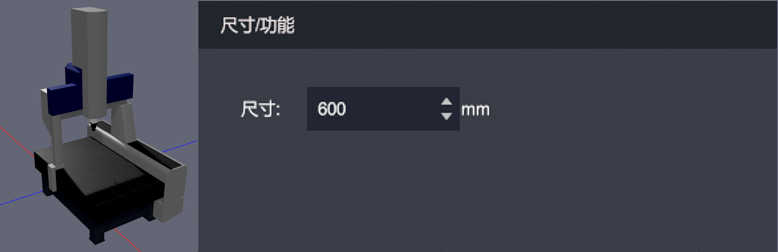
**参数尺寸:**
> 尺寸为700~9999mm;
**控制接口:**
> * X伺服:电机接口,打开后X轴电机启动;
> * X-负限位:DI接口,当X轴物体到达负限位时,模拟控制处X-负限位图标亮起;
> * X-0限位:DI接口,当X轴物体到达0限位时,模拟控制处X-0限位图标亮起;
> * X-正限位:DI接口,当X轴物体到达正限位时,模拟控制处X-正限位图标亮起;
> * Y伺服:电机接口,打开后Y轴电机启动;
> * Y-负限位:DI接口,当Y轴物体到达负限位时,模拟控制处Y-负限位图标亮起;
> * Y-0限位:DI接口,当Y轴物体到达0限位时,模拟控制处Y-0限位图标亮起;
> * Y-正限位:DI接口,当Y轴物体到达正限位时,模拟控制处Y-正限位图标亮起;
> * Z伺服:电机接口,打开后Z轴电机启动;
> * Z负限位:DI接口,当Z轴物体到达负限位时,模拟控制处Z-负限位图标亮起;
> * Z-0限位:DI接口,当Z轴物体到达0限位时,模拟控制处Z-0限位图标亮起;
> * Z-正限位:DI接口,当Z轴物体到达正限位时,模拟控制处Z-正限位图标亮起;
> * 碰撞反馈:DI接口,当物料耗材碰撞时,模拟控制处碰撞反馈图标亮起;
> * X编码:F32输入接口,X电机角度值反馈;
> * Y编码:F32输入接口,Y电机角度值反馈;
> * Z编码:F32输入接口,Z电机角度值反馈;
## 激光雕刻机
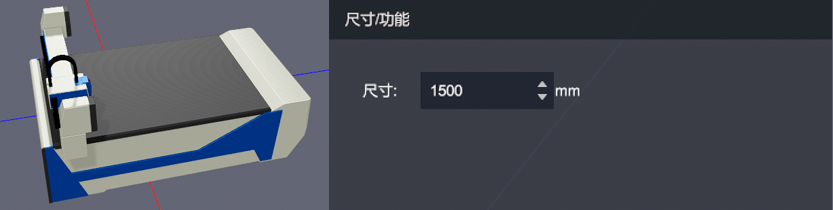
**参数尺寸:**
> 尺寸为1500~9999mm;
**控制接口:**
> * X伺服:电机接口,打开后X轴电机启动;
> * X-负限位:DI接口,当X轴物体到达负限位时,模拟控制处X-负限位图标亮起;
> * X-0限位:DI接口,当X轴物体到达0限位时,模拟控制处X-0限位图标亮起;
> * X-正限位:DI接口,当X轴物体到达正限位时,模拟控制处X-正限位图标亮起;
> * Y伺服:电机接口,打开后Y轴电机启动;
> * Y-负限位:DI接口,当Y轴物体到达负限位时,模拟控制处Y-负限位图标亮起;
> * Y-0限位:DI接口,当Y轴物体到达0限位时,模拟控制处Y-0限位图标亮起;
> * Y-正限位:DI接口,当Y轴物体到达正限位时,模拟控制处Y-正限位图标亮起;
> * X编码:F32输入接口,X电机角度值反馈;
> * Y编码:F32输入接口,Y电机角度值反馈;
> * 激光使能:DO接口,开启后激光启动;
> * 耗材反馈:DI接口,当耗材与激光雕刻机平面接触时,模拟控制处的耗材反馈图标亮起;
## 立库
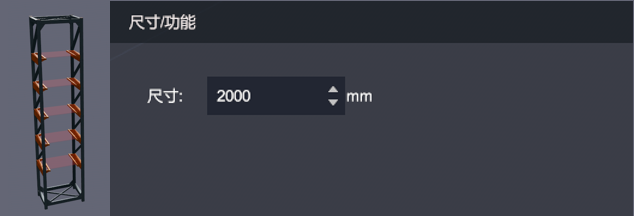
**参数尺寸:**
> 尺寸为固定数值2000mm;
## 仓储堆垛机
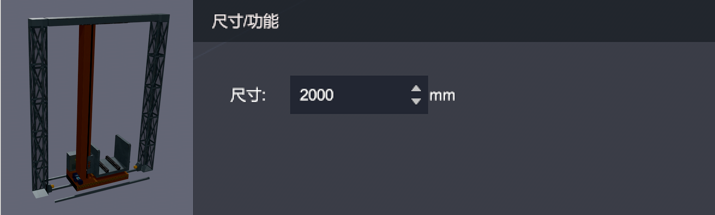
**参数尺寸:**
> 尺寸为2000~8000mm;
**控制接口:**
> * X伺服:电机接口,打开后X轴电机启动;
> * X-负限位:DI接口,当X轴物体到达负限位时,模拟控制处X-负限位图标亮起;
> * X-0限位:DI接口,当X轴物体到达0限位时,模拟控制处X-0限位图标亮起;
> * X-正限位:DI接口,当X轴物体到达正限位时,模拟控制处X-正限位图标亮起;
> * Y伺服:电机接口,打开后Y轴电机启动;
> * Y-负限位:DI接口,当Y轴物体到达负限位时,模拟控制处Y-负限位图标亮起;
> * Y-0限位:DI接口,当Y轴物体到达0限位时,模拟控制处Y-0限位图标亮起;
> * Y-正限位:DI接口,当Y轴物体到达正限位时,模拟控制处Y-正限位图标亮起;
> * X编码:F32输入接口,X电机角度值反馈;
> * Y编码:F32输入接口,Y电机角度值反馈;
> * 伸缩叉方向:DO接口,打开后伸缩与当前方向反向运行;
> * 伸缩叉使能:DO接口,打开后伸缩叉开始运动;
## 行车起重机
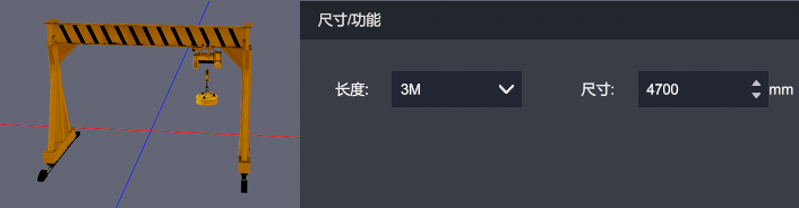
**参数尺寸:**
> 长度为3~15M,尺寸为4700mm~9999mm
**控制接口:**
> * X速度控制:F32输出接口,控制X轴方向起重机速度;
> * X方向:DO接口,打开后X方向起重机反向运行;
> * X使能:DO接口,打开后X方向起重机开始运动;
> * X编码:F32输入接口,反馈X反向角度值;
> * X-0限位:DI接口,当X方向的起重机到达0限位时,模拟控制出的X-0限位图标亮起;
> * X-正限位:DI接口,当X方向的起重机到达正限位时,模拟控制出的X-正限位图标亮起;
> * Y速度控制:F32输出接口,控制Y轴方向起重机速度;
> * Y方向:DO接口,打开后Y方向起重机反向运行;
> * Y使能:DO接口,打开后Y方向起重机开始运动;
> * Y编码:F32输入接口,反馈Y反向角度值;
> * Y-0限位:DI接口,当Y方向的起重机到达0限位时,模拟控制出的Y-0限位图标亮起;
> * Y-正限位:DI接口,当Y方向的起重机到达正限位时,模拟控制出的Y-正限位图标亮起;
> * Z速度控制:F32输出接口,控制Z轴方向起重机速度;
> * Z方向:DO接口,打开后Z方向起重机反向运行;
> * Z使能:DO接口,打开后Z方向起重机开始运动;
> * Z编码:F32输入接口,反馈Z反向角度值;
> * Z-0限位:DI接口,当Z方向的起重机到达0限位时,模拟控制出的Z-0限位图标亮起;
> * Z-正限位:DI接口,当Z方向的起重机到达正限位时,模拟控制出的Z-正限位图标亮起;
> * 电磁使能:DO接口,打开后电磁吸附开始运作;
> * 抓具检测:DI接口,当检测到有抓具时,模拟控制处的抓举检测图标亮起;
> * 机械报警:DI接口,检测到机械碰撞时,模拟控制处的机械报警图标亮起;
> * 重力反馈:F32输入接口,反馈重力值;
## 支架托盘

**参数尺寸:**
> 长度为200~500mm
## 伺服关节
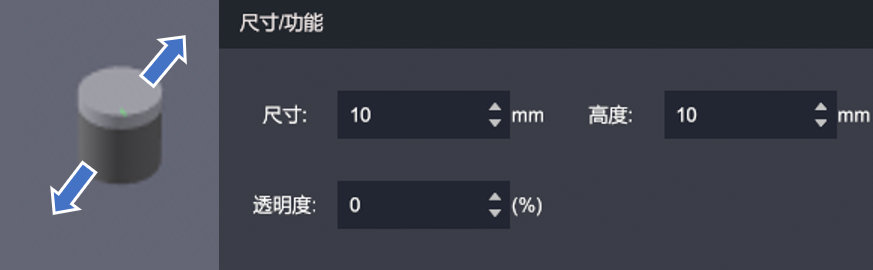
**参数尺寸:**
> 尺寸:0~9999mm;
> 高度:0~9999mm;
> 透明度:0~100%;
**控制接口:**
> * 伺服控制:电机接口,打开后电机启动;
> * 伺服控制反馈:F32输入接口,反馈电机角度值;
## 完美伺服位移
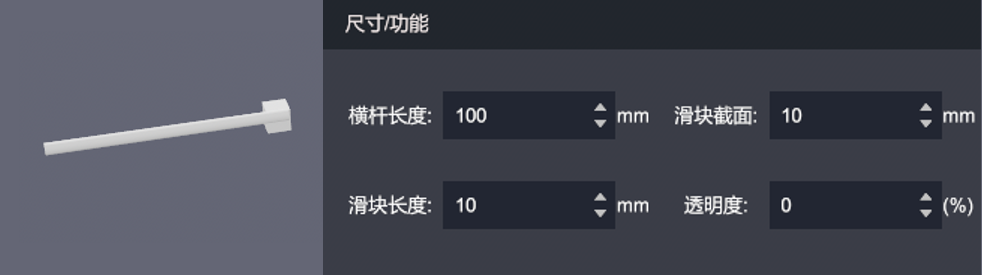
**参数尺寸:**
> 横杆长度:0~9999mm;
> 滑块截面:0~9999mm;
> 滑块长度:0~9999mm;
> 透明度:0~100%;
**控制接口:**
> * X伺服:电机接口,打开后X轴电机启动;
> * X-负限位:DI接口,当X轴物体到达负限位时,模拟控制处X-负限位图标亮起;
> * X-0限位:DI接口,当X轴物体到达0限位时,模拟控制处X-0限位图标亮起;
> * X-正限位:DI接口,当X轴物体到达正限位时,模拟控制处X-正限位图标亮起;
> * X编码:F32输入接口,反馈X反向角度值;
## 电动缸A
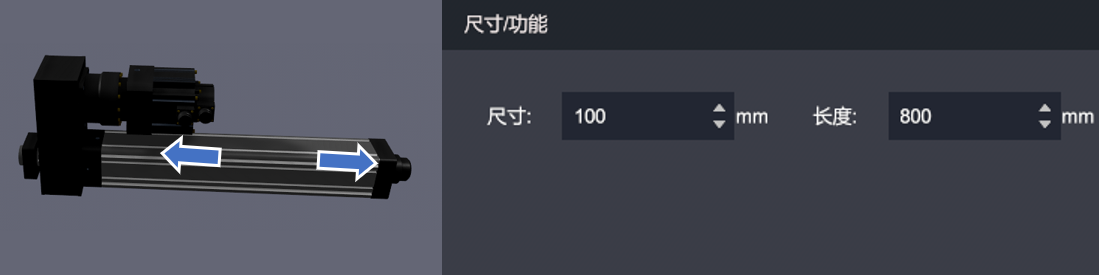
**参数尺寸:**
> 尺寸:0~9999mm;
> 长度:0~9999mm;
**控制接口:**
> * X伺服:电机接口,打开后X轴电机启动;
> * X-负限位:DI接口,当X轴物体到达负限位时,模拟控制处X-负限位图标亮起;
> * X-0限位:DI接口,当X轴物体到达0限位时,模拟控制处X-0限位图标亮起;
> * X-正限位:DI接口,当X轴物体到达正限位时,模拟控制处X-正限位图标亮起;
> * X编码:F32输入接口,反馈X反向角度值;
## 激光打标机
**参数尺寸:**
> 尺寸:0~9999mm;
> 图片:图片为加工出的图片,软件自带10种不同图片,用户也可以自行进行根目录文件夹进行添加替换;
**控制接口:**
> * 打标使能:DO接口,开启后打标机启动;
> * 霍尔反馈:DI接口,当激光接触物料耗材时,模拟控制处霍尔反馈图标亮起;
## 数字喷码机

**参数尺寸:**
> 图片:图片为加工出的图片,软件自带10种不同图片,用户也可以自行进行根目录文件夹进行添加替换;
> 喷码大小:50*50~300*300mm;
**控制接口:**
> * 光电检测:DI接口,当红外线检测到耗材时,模拟控制处光电检测图标亮起;
> * 喷码使能:DO接口,打开后喷码机开始喷涂;
## 贴标机
**参数尺寸:**
> 图片:图片为加工出的图片,软件自带10种不同图片,用户也可以自行进行根目录文件夹进行添加替换;
> 尺寸:0~9999mm;
**控制接口:**
> * 贴标使能:DO接口,打开后贴标机开始贴标;
> * 光电检测:DI接口,当红外线检测到耗材时,模拟控制处光电检测图标亮起;
