
*****
*****
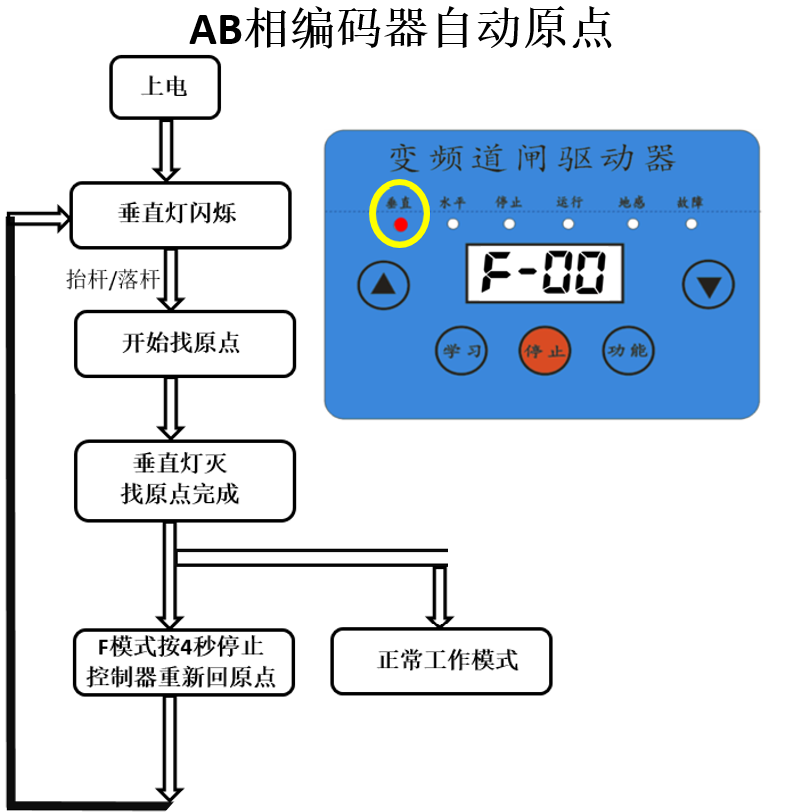
>[info] #### **道闸原点**
> B相编码器原点(备注:磁性编码器不需要每次重新上电不需要找原点):
1、首先道闸垂直点的机械限位必须有;
2、控制器断电重新上电按抬杆或者落杆会自动找原点,并且成功后才可以正常抬落杆;
3、控制器不断电在`F-xx`模式(`F-04`除外)下长按停止键直到垂直灯闪后放开,再按上下任意键会自动找原点;
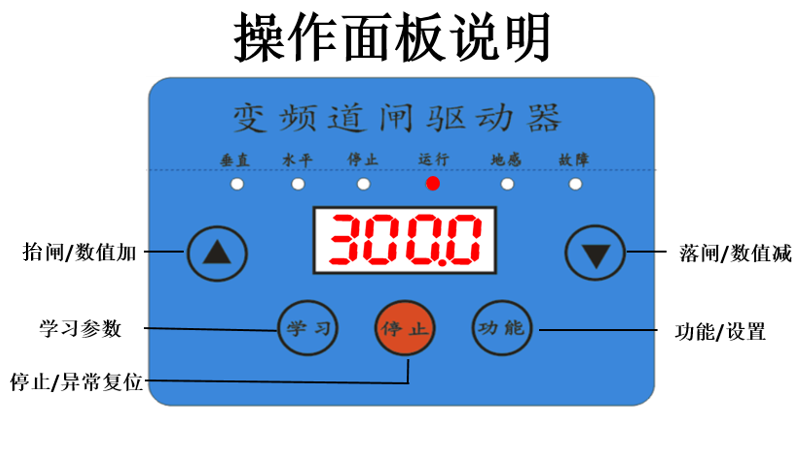
> #### **显示项内容说明:**
>本控制器主要有两种功能
一个是`F-xx`功能用于学习和监控;
一个是`P-xx`功能用于修改使用参数,常按功能键 2 - 3 秒可来回切换`F`和`P`功能。

*****
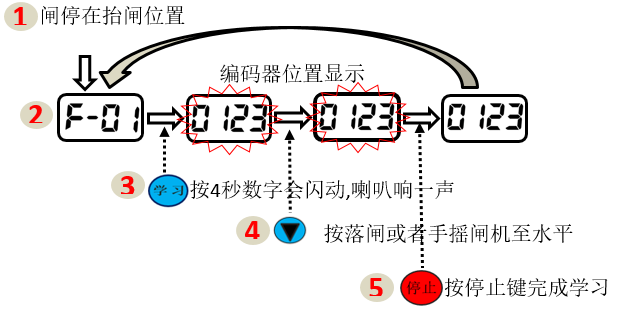
>[info] #### **道闸位置学习**
> 编码器旋转角度范围 0 - 250 度(3500 - 1000)**(注意:AB相编码器模式找到原点后才能学习位置)**
> 
*****
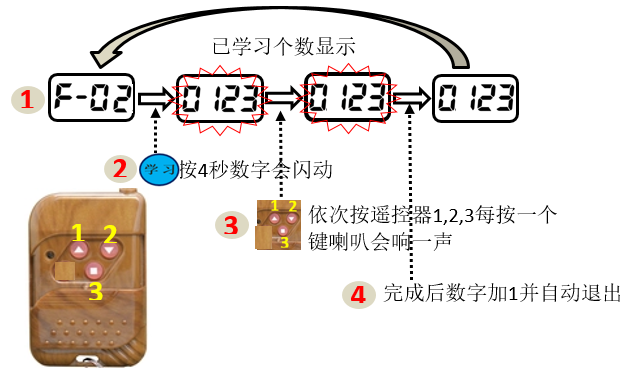
>[info] #### **内置遥控器学习**
>遥控器学习组数小于10组
>[info] #### **外置遥控器学习**
> 需要接上外置遥控器,打开控制器电源 3 秒内同时按住`抬杆`+`落杆`直至遥控接收器灯闪即可(一般按住2-3秒即可)
清除遥控器则按`停止`键 3 秒.
> 
*****
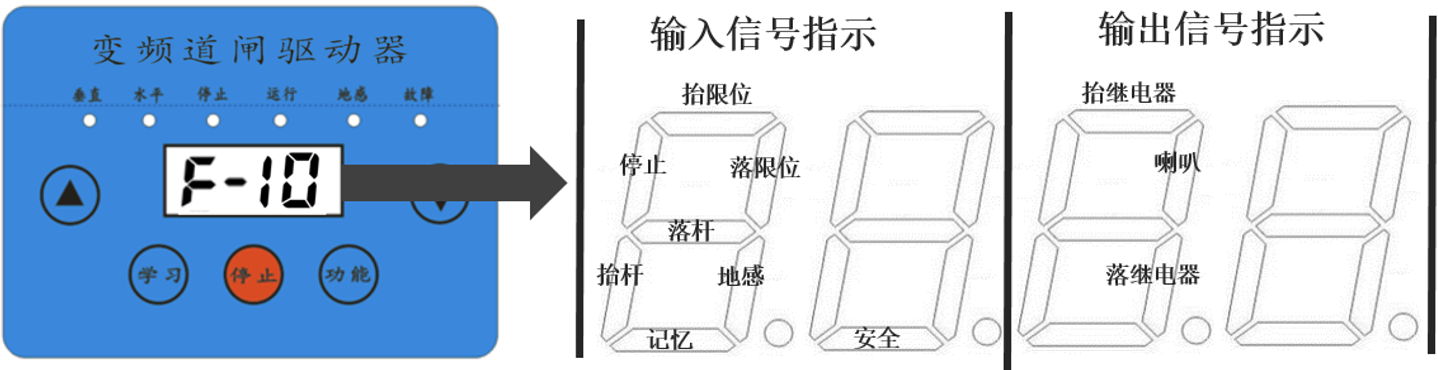
>[info] #### **输入输出端口监视**
>在`F-10`监视模式下面可以监控控制器输入与输出状态,四个数码管代表不同的状态意义
- 前言
- 1、产品型号
- 1-1、GA-317A系列、标准道闸
- 1-2、GA-317A系列、防撞道闸
- 1-3、GA-319A系列、标准道闸
- 1-4、GA-318B高速变频道闸
- 1-5、GA-583空降闸
- 1-6、GA-580广告道闸
- 1-6-a、产品结构
- 1-6-b、安装说明
- 1-7、GA-582广告道闸
- 1-8、GA-327标准直杆道闸
- 1-9、GA-329标准直杆道闸
- 2、设备接线图
- 2-1、交流变频主板(黑色外壳)
- 2-1-a、概序
- 2-1-b、功能参数设置说明
- 2-1-c、故障分析
- 2-2、交流变频主板(蓝色外壳)
- 2-2-a、概序
- 2-2-b、操作面板说明及常用功能操作
- 2-2-c、参数功能表与设置方法
- 2-2-d、故障代码及排除方法
- 2-3、直流无刷主板
- 2-3-a、设置操作
- 2-3-b、上电自检流程
- 2-3-c、主板参数设置操作流程及参数表
- 2-4、广告道闸主板
- 2-4-a、概序
- 2-4-b、调试说明
- 2-4-c、故障分析
- 2-5、标准道闸主板
- 2-5-a、概序
- 2-5-b、安装与调试
- 2-5-c、故障分析
- 3、道闸的基本维护与保养
- 3-1、外部维护保养
- 3-2、内部机芯保养
- 3-3、电路部分保养
- 4、道闸弹簧调试说明(通用)
- 5、安装道闸注意事项