:-: 
# :-: **效果展示**
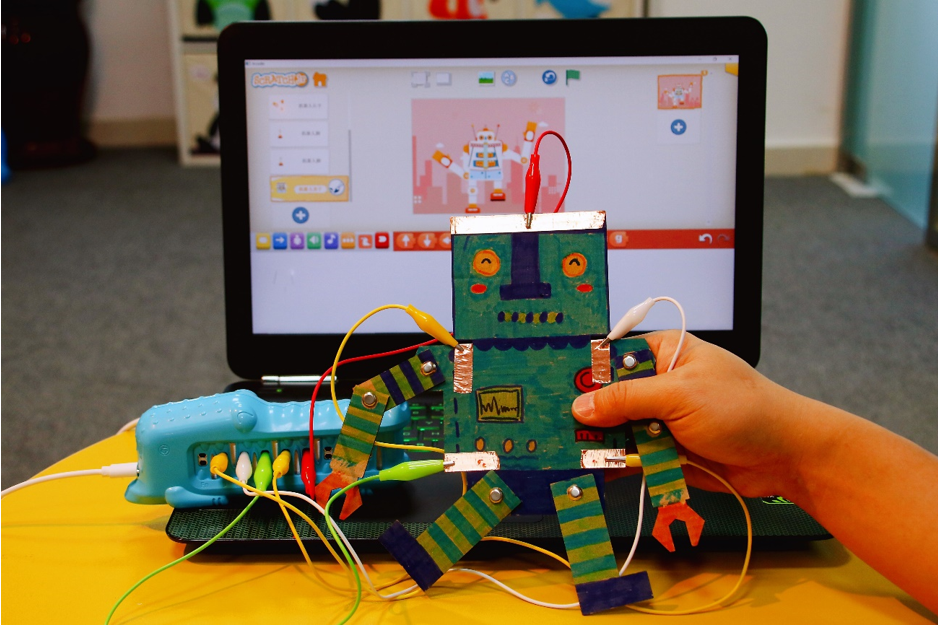
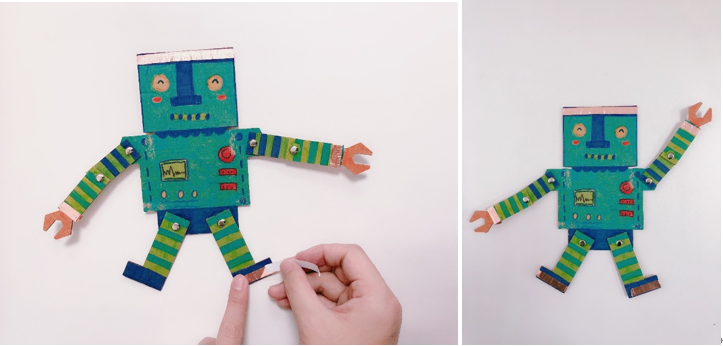
* ### 《互动机器人》作品的最终效果
:-: 
*****
# :-: **材料准备**
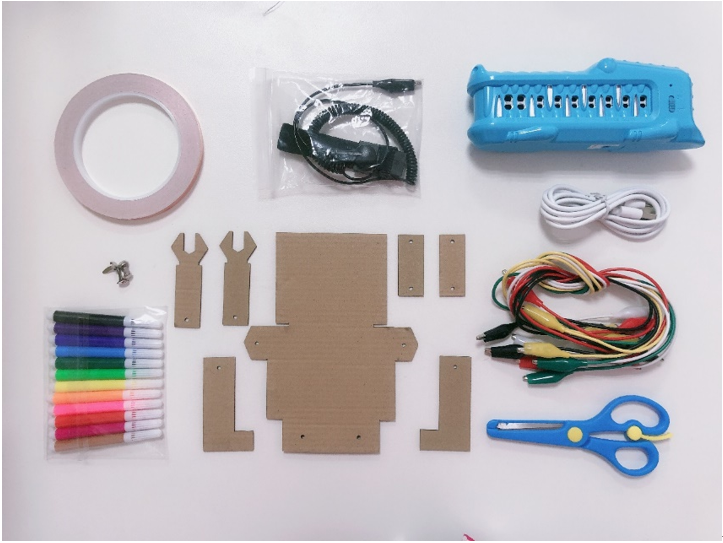
* ### 鳄鱼板、数据线、鳄鱼夹、接地手环
* ### 铜胶带、剪刀
* ### 机器人素材、彩笔
:-: 
*****
# **制作步骤**
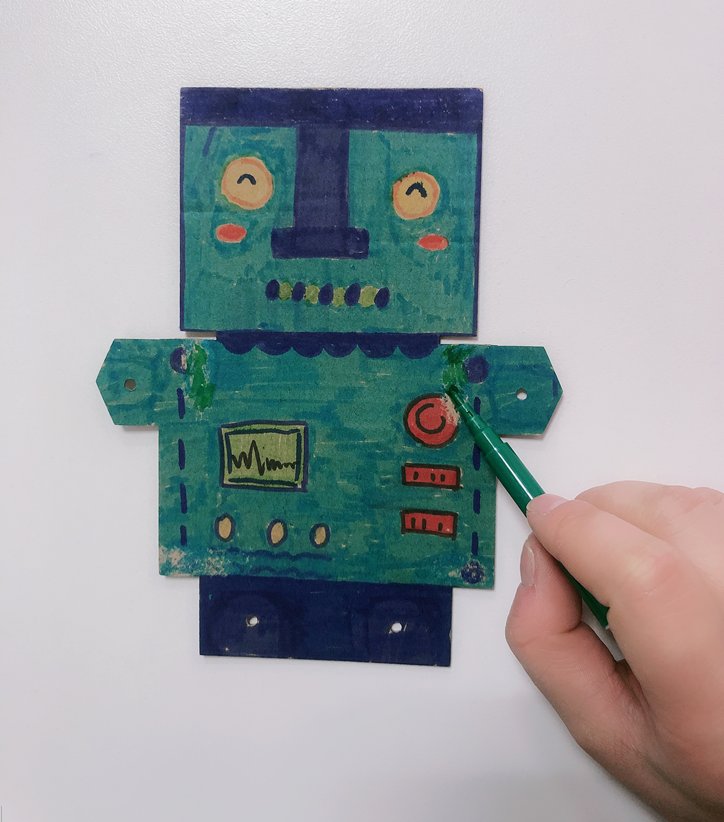
### 1. 给机器人上色,用彩笔涂上丰富有趣的图案,给机器人的脑袋、胳膊和手上色
:-: 
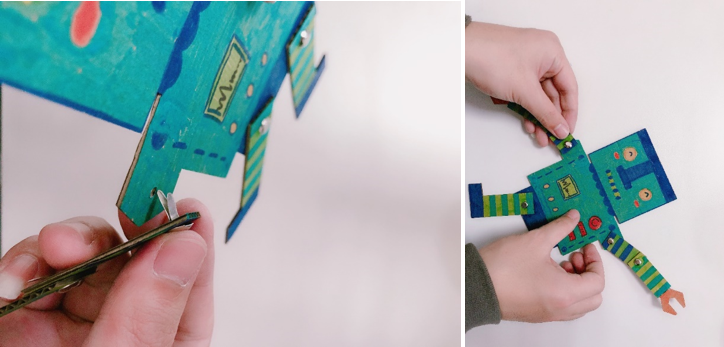
### 2. 使用机器人素材包里面的瓦楞纸进行拼接,找到相应的配件,拼装成如图所示的形状,使用两脚钉进行固定,这样子机器人可以做出各种各样的姿势
:-: 
### 3. 将铜胶带剪切至合适的长度,分别贴在机器人的脑袋、胳膊、腿上,这里可以两条胳膊、两条腿都粘贴上铜胶带
:-: 
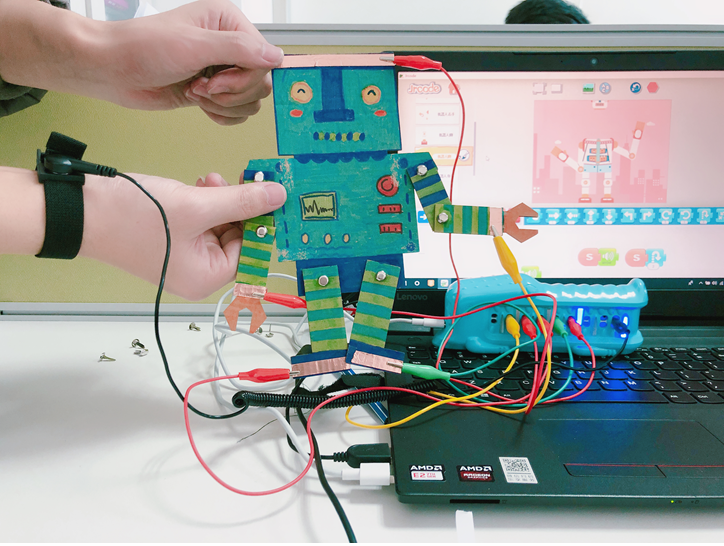
### 4. 使用接地手环连接鳄鱼板,用鳄鱼夹连接机器人和鳄鱼板,脑袋连接鳄鱼板的a键,左手连接f键,右手连接g键,左脚连接d键,右脚连接s键
:-: 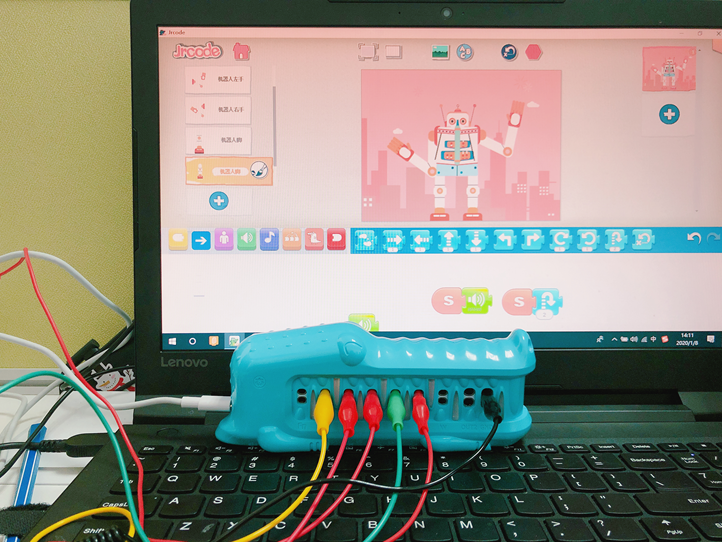
### 5. 使用Type-c数据线连接鳄鱼板和电脑,打开开关,电源指示灯亮表示连接成功
:-: 
### 6. 开始编程体验
:-: 
*****
# **代码编程**
* ### 导入案例源文件
:-: 
*****
# **操作体验**
* ### 戴上接地手环,用手触摸机器人身上各个部位,机器人就会和你进行互动反馈
*****
