
[TOC]
# 散列
在对某个集合进行查找,列表需要的时间为是O(n),树查找为O(logN),散列是一种常数平均时间执行。
对于散列,我们要新增或查找某个元素,我们通过把当前元素的关键字 通过某个函数映射到数组中的某个位置,通过数组下标一次定位就可完成操作。
**存储位置 = f(关键字)**
其中,这个函数f一般称为**散列函数**,这个函数的设计好坏会直接影响到**散列表**的优劣。
## 散列函数
好的哈希函数会尽可能地保证 **计算简单和散列地址分布均匀.**
[Java中String的hash函数分析](https://blog.csdn.net/hengyunabc/article/details/7198533)
[Time33哈希算法](https://blog.csdn.net/fengxinze/article/details/7186765)
## 散列冲突
首先散列函数并不保证计算结果唯一, 通过散列函数得出的实际存储地址相同怎么办?也就是说,当我们对某个元素进行哈希运算,得到一个存储地址,然后要进行插入的时候,发现已经被其他元素占用了,其实这就是所谓的哈希冲突,也叫散列碰撞
散列冲突的解决方案有多种:开放定址法(发生冲突,继续寻找下一块未被占用的存储地址),再散列函数法,链地址法,而HashMap即是采用了链地址法,也就是数组+链表的方式。
# HashMap(基于jdk1.8)
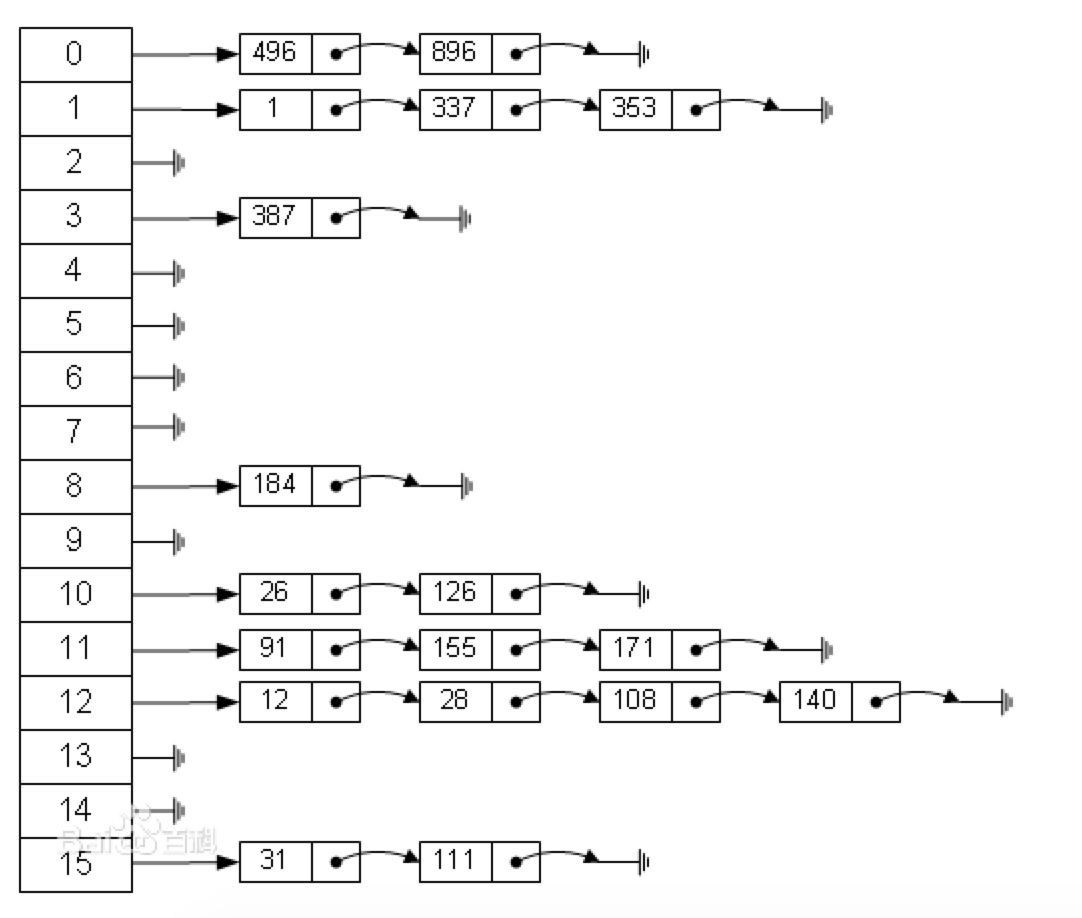
从上图我们可以看到,HashMap由**链表+数组**组成,他的**底层结构是一个数组,而数组的元素是一个单向链表(当数量大于8时,切换为红黑树)。**
接下来,我们开始分析源码
## Node
HashMap的主干是一个Node数组。Entry是HashMap的基本组成单元,每一个Entry包含一个key-value键值对。
Node是HashMap中的一个静态内部类。代码如下
~~~
static class Node<K,V> implements Map.Entry<K,V> {
final int hash;
final K key;
V value;
Node<K,V> next;
}
~~~
## 核心成员变量
~~~
//以Node<K,V>为元素的数组,也就是上图HashMap的纵向的长链数组,起长度必须为2的n次
transient Node<K,V>[] table;
//大小
transient int size
//负载因子,代表了table的填充度有多少,默认是0.75
final float loadFactor;
//扩容的临界值,或者所能容纳的key-value对的极限。当size>threshold的时候就会扩容
int threshold;
~~~
## 构造函数
构造函数并仅仅是做了一些赋值操作
~~~
public HashMap(int initialCapacity, float loadFactor) {
...
this.loadFactor = loadFactor;
this.threshold = tableSizeFor(initialCapacity);
}
static final float DEFAULT_LOAD_FACTOR = 0.75f;
public HashMap(int initialCapacity) {
this(initialCapacity, DEFAULT_LOAD_FACTOR);
}
public HashMap() {
this.loadFactor = DEFAULT_LOAD_FACTOR;
}
//高效的计算出大于且距离最小的2n这个值
static final int tableSizeFor(int cap) {
int n = cap - 1;
n |= n >>> 1;
n |= n >>> 2;
n |= n >>> 4;
n |= n >>> 8;
n |= n >>> 16;
return (n < 0) ? 1 : (n >= MAXIMUM_CAPACITY) ? MAXIMUM_CAPACITY : n + 1
~~~
## 插入
~~~
public V put(K key, V value) {
return putVal(hash(key), key, value, false, true);
}
final V putVal(int hash, K key, V value, boolean onlyIfAbsent,
boolean evict) {
Node<K,V>[] tab; Node<K,V> p; int n, i;
if ((tab = table) == null || (n = tab.length) == 0)
//1 处理table为空,未初始化的情况
n = (tab = resize()).length;
if ((p = tab[i = (n - 1) & hash]) == null)
//2 算元素所要储存的位置index((n - 1) & hash)
//2.1 如果该位置没有值,这直接插入newNode
tab[i] = newNode(hash, key, value, null);
else {
//2.2 如果该位置有值
Node<K,V> e; K k;
if (p.hash == hash &&
((k = p.key) == key || (key != null && key.equals(k))))
//2.2.1 key值相同,直接覆盖
e = p;
else if (p instanceof TreeNode)
//2.2.2 如果是红黑树, 插入树
e = ((TreeNode<K,V>)p).putTreeVal(this, tab, hash, key, value);
else {
//2.2.3 如果是链表
for (int binCount = 0; ; ++binCount) {
if ((e = p.next) == null) {
//2.2.3.1 如果是链表找不到值,newNode
p.next = newNode(hash, key, value, null);
if (binCount >= TREEIFY_THRESHOLD - 1)
//2.2.3.1。1 如果是链表过长,转化为红黑树
treeifyBin(tab, hash);
break;
}
if (e.hash == hash &&
((k = e.key) == key || (key != null && key.equals(k))))
//2.2.3.2 如果是链表找到值,直接替换
break;
p = e;
}
}
if (e != null) { // existing mapping for key
//2.2.4 已经存在
V oldValue = e.value;
if (!onlyIfAbsent || oldValue == null)
e.value = value;
afterNodeAccess(e);
return oldValue;
}
}
++modCount;
if (++size > threshold)
resize();
afterNodeInsertion(evict);
return null;
}
~~~
## hash 与 index
~~~
static final int hash(Object key) {
int h;
return (key == null) ? 0 : (h = key.hashCode()) ^ (h >>> 16);
}
int index = (n - 1) & hash;
~~~
## 扩容resize
HashMap扩容可以分为三种情况:
第一种:使用默认构造方法初始化HashMap。从前文可以知道HashMap在一开始初始化的时候会返回一个空的table,并且thershold为0。因此第一次扩容的容量为默认值DEFAULT\_INITIAL\_CAPACITY也就是16。同时threshold = DEFAULT\_INITIAL\_CAPACITY \* DEFAULT\_LOAD\_FACTOR = 12。
第二种:指定初始容量的构造方法初始化HashMap。那么从下面源码可以看到初始容量会等于threshold,接着threshold = 当前的容量(threshold) \* DEFAULT\_LOAD\_FACTOR。
第三种:HashMap不是第一次扩容。如果HashMap已经扩容过的话,那么每次table的容量以及threshold量为原有的两倍。
~~~
final Node<K,V>[] resize() {
Node<K,V>[] oldTab = table;
int oldCap = (oldTab == null) ? 0 : oldTab.length;
int oldThr = threshold;
int newCap, newThr = 0;
if (oldCap > 0) {
if (oldCap >= MAXIMUM_CAPACITY) {
threshold = Integer.MAX_VALUE;
return oldTab;
}
else if ((newCap = oldCap << 1) < MAXIMUM_CAPACITY &&
oldCap >= DEFAULT_INITIAL_CAPACITY)
newThr = oldThr << 1; // double threshold
}
else if (oldThr > 0) // initial capacity was placed in threshold
newCap = oldThr;
else { // zero initial threshold signifies using defaults
newCap = DEFAULT_INITIAL_CAPACITY;
newThr = (int)(DEFAULT_LOAD_FACTOR * DEFAULT_INITIAL_CAPACITY);
}
if (newThr == 0) {
float ft = (float)newCap * loadFactor;
newThr = (newCap < MAXIMUM_CAPACITY && ft < (float)MAXIMUM_CAPACITY ?
(int)ft : Integer.MAX_VALUE);
}
threshold = newThr;
@SuppressWarnings({"rawtypes","unchecked"})
Node<K,V>[] newTab = (Node<K,V>[])new Node[newCap];
table = newTab;
if (oldTab != null) {
for (int j = 0; j < oldCap; ++j) {
Node<K,V> e;
if ((e = oldTab[j]) != null) {
oldTab[j] = null;
if (e.next == null)
newTab[e.hash & (newCap - 1)] = e;
else if (e instanceof TreeNode)
((TreeNode<K,V>)e).split(this, newTab, j, oldCap);
else { // preserve order
Node<K,V> loHead = null, loTail = null;
Node<K,V> hiHead = null, hiTail = null;
Node<K,V> next;
do {
next = e.next;
if ((e.hash & oldCap) == 0) {
if (loTail == null)
loHead = e;
else
loTail.next = e;
loTail = e;
}
else {
if (hiTail == null)
hiHead = e;
else
hiTail.next = e;
hiTail = e;
}
} while ((e = next) != null);
if (loTail != null) {
loTail.next = null;
newTab[j] = loHead;
}
if (hiTail != null) {
hiTail.next = null;
newTab[j + oldCap] = hiHead;
}
}
}
}
}
return newTab;
}
~~~
## 参考资料
[JDK8中的HashMap实现原理及源码分析](https://www.jianshu.com/p/17177c12f849)
- Java
- Object
- 内部类
- 异常
- 注解
- 反射
- 静态代理与动态代理
- 泛型
- 继承
- JVM
- ClassLoader
- String
- 数据结构
- Java集合类
- ArrayList
- LinkedList
- HashSet
- TreeSet
- HashMap
- TreeMap
- HashTable
- 并发集合类
- Collections
- CopyOnWriteArrayList
- ConcurrentHashMap
- Android集合类
- SparseArray
- ArrayMap
- 算法
- 排序
- 常用算法
- LeetCode
- 二叉树遍历
- 剑指
- 数据结构、算法和数据操作
- 高质量的代码
- 解决问题的思路
- 优化时间和空间效率
- 面试中的各项能力
- 算法心得
- 并发
- Thread
- 锁
- java内存模型
- CAS
- 原子类Atomic
- volatile
- synchronized
- Object.wait-notify
- Lock
- Lock之AQS
- Lock子类
- 锁小结
- 堵塞队列
- 生产者消费者模型
- 线程池