#### 按类别
**功能描述**:将已有类别的点云修改至另一类别。

参数设置:
内存文件:在工程项目管理模块中使用 加载 功能后的文件数据,会显示在内存文件窗口中。
所选文件:在资源项目管理界面中选择的数据,会显示在所选文件窗口中。
从类别:待分类类别。
至类别:分类目标类别。
#### 按测距
**功能描述**:按点云距载体中心的距离进行分类。
参数设置:
内存文件:在工程项目管理模块中使用 加载 功能后的文件数据,会显示在内存文件窗口中。
所选文件:在资源项目管理界面中选择的数据,会显示在所选文件窗口中。
LiDAR文件可选择静态LiDAR文件以及移动LiDAR文件。
从类别:待分类类别。
至类别:分类目标类别。
静态LiDAR文件: 固定激光扫描仪获取的LiDAR文件。
移动LiDAR文件: 移动激光扫描仪获取的LiDAR文件。
有效距离:(默认从1m到600m)将在距视点设置距离范围内的点进行分类。
- 当选择为静态LiDAR文件时:
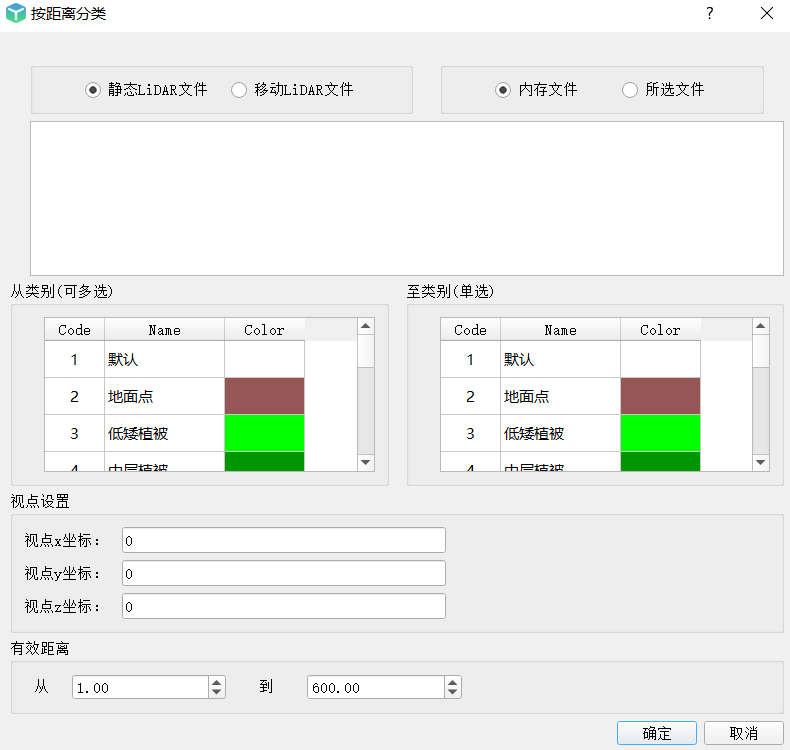
内存文件:在工程项目管理模块中使用 加载 功能后的文件数据,会显示在内存文件窗口中。
所选文件:在资源项目管理界面中选择的数据,会显示在所选文件窗口中。
从类别:待分类类别。
至类别:分类目标类别。
轨迹文件选择:需选择对应点云数据的轨迹文件。
视点设置:输入仪器所在点位x坐标、y坐标、z坐标。
有效距离:(默认从1m到600m)将在距视点设置距离范围内的点进行分类。

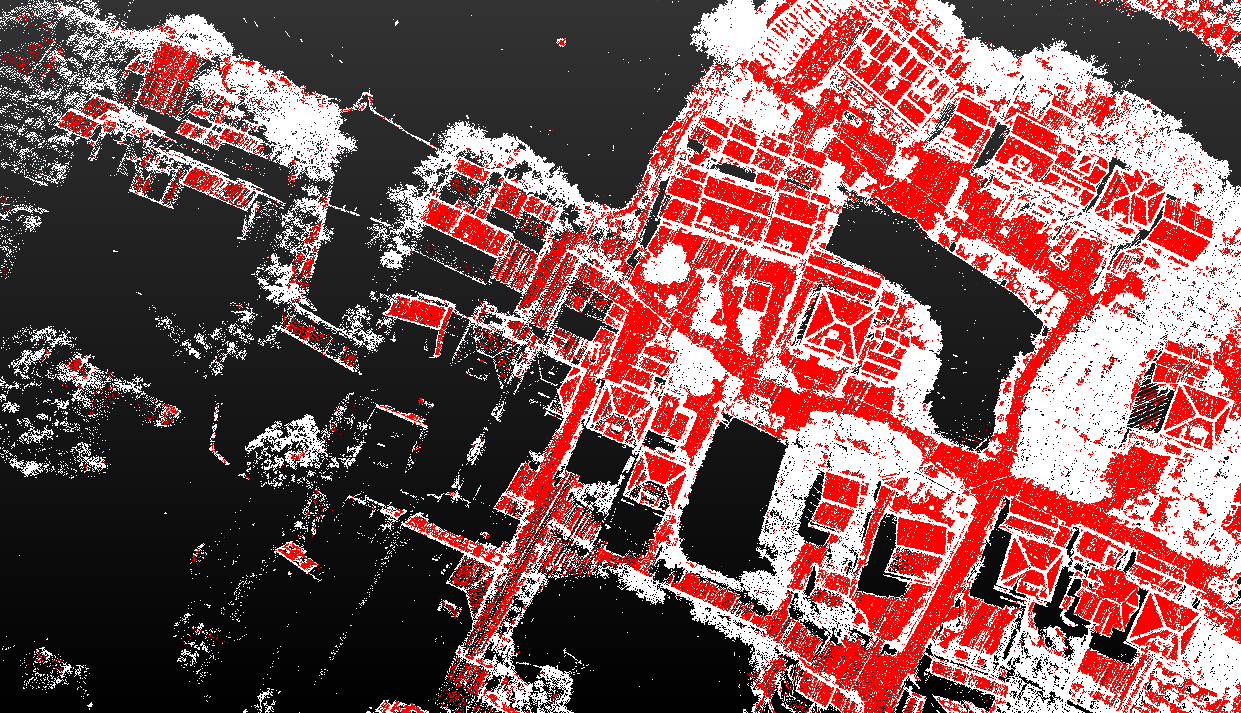
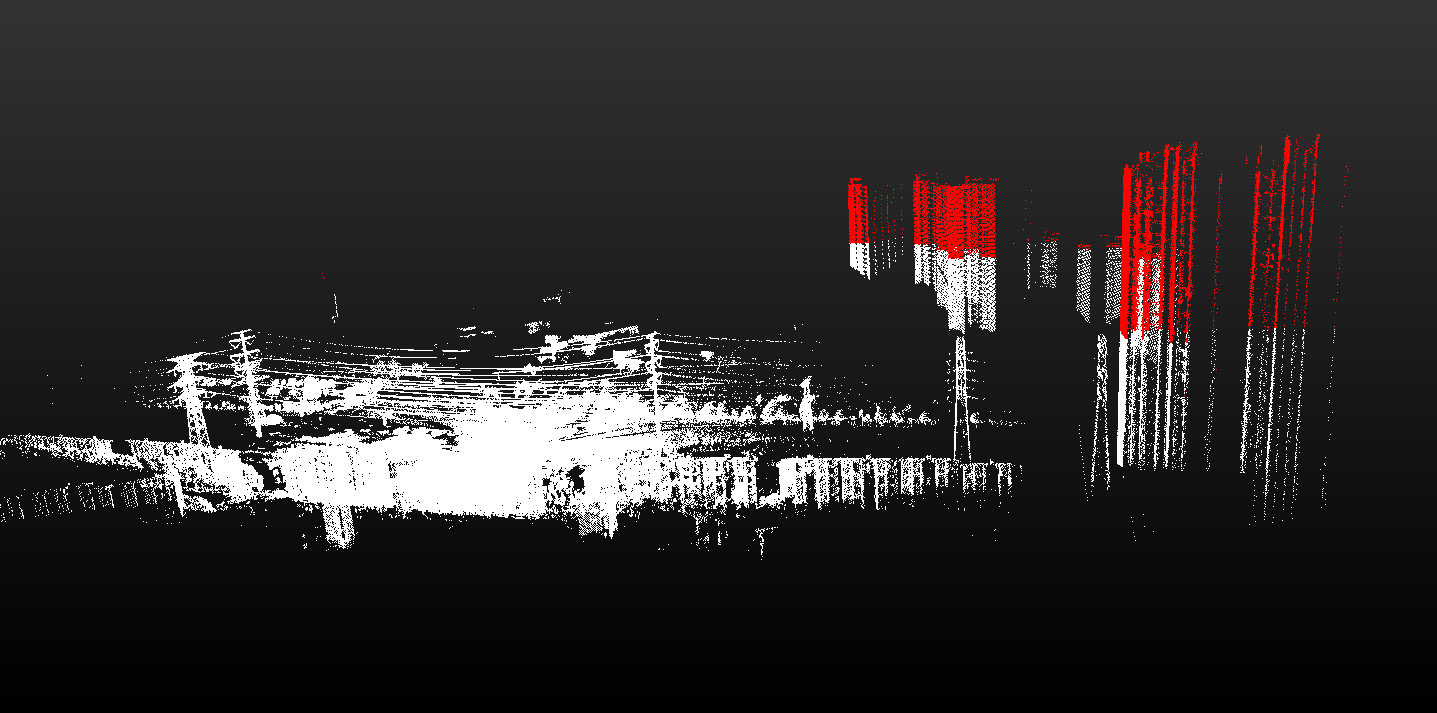
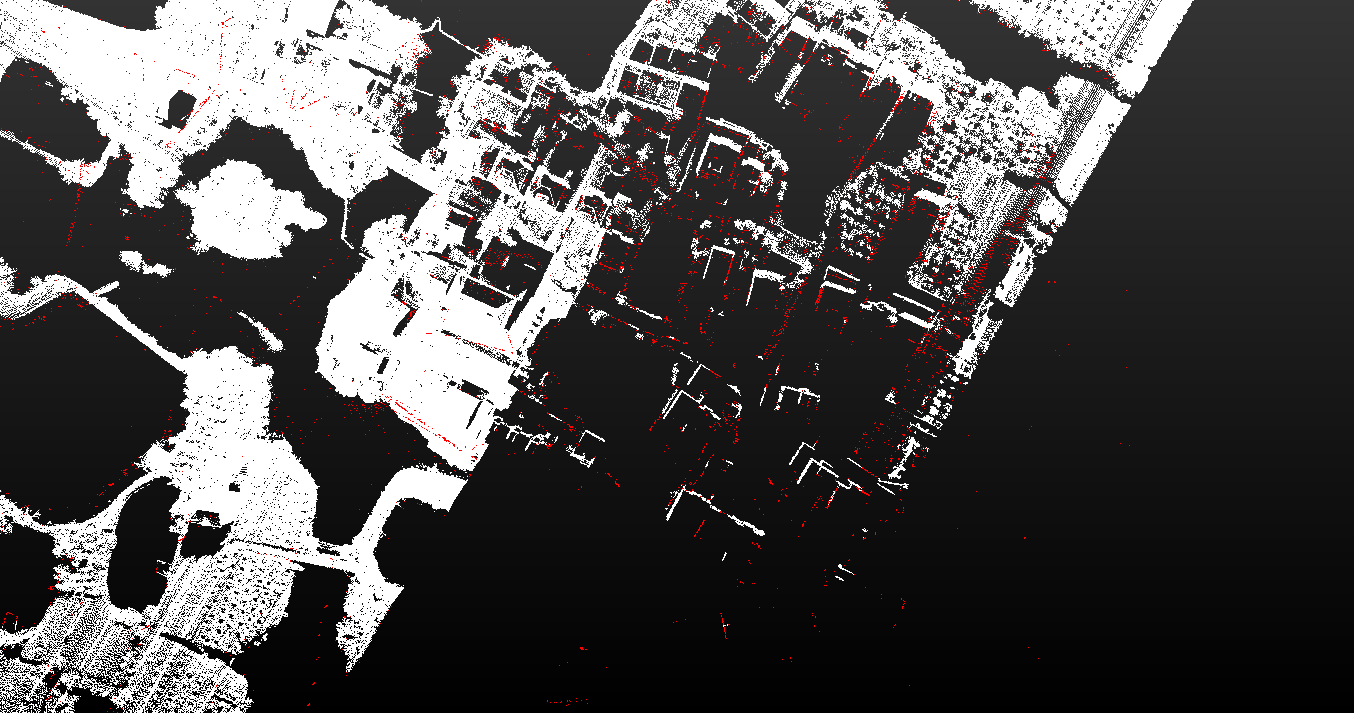
按距离分类,红色为有效距离外的点
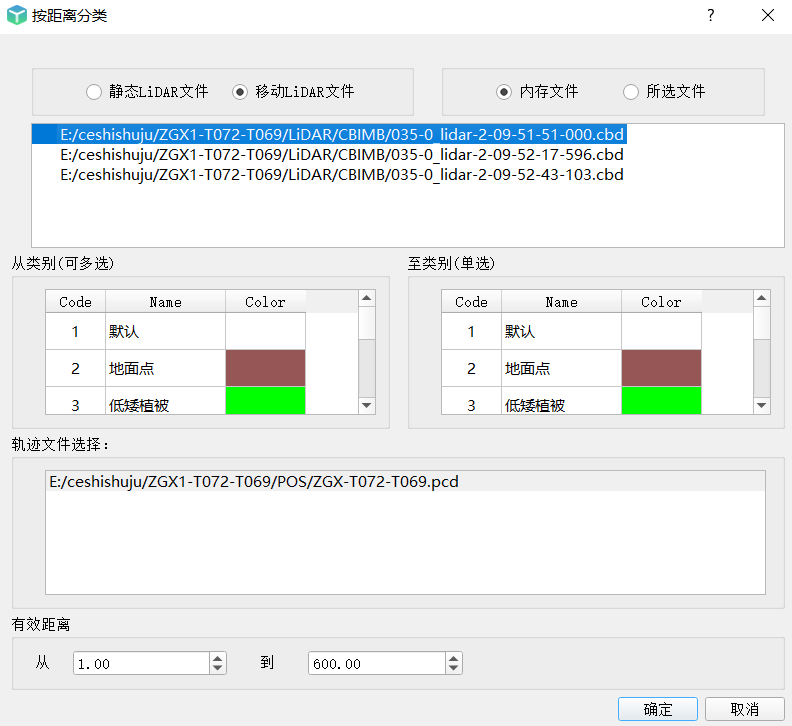
- 当选择为移动LiDAR文件时:

内存文件:在工程项目管理模块中使用 加载 功能后的文件数据,会显示在内存文件窗口中。
所选文件:在资源项目管理界面中选择的数据,会显示在所选文件窗口中。
从类别:待分类类别。
至类别:分类目标类别。
轨迹文件选择:需选择对应点云数据的轨迹文件。
有效距离:(默认从1m到600m)将在距视点设置距离范围内的点进行分类。
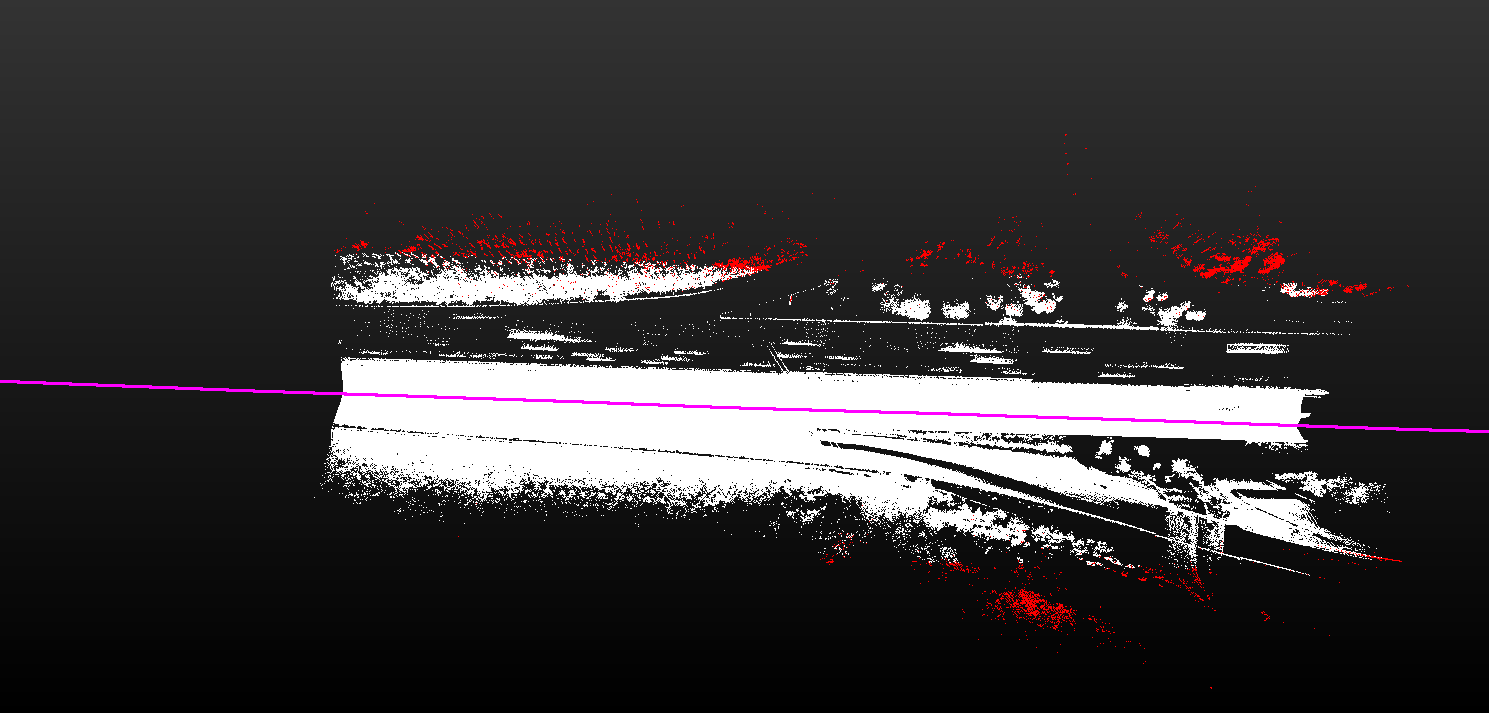
按距离分类,红色为有效距离外的点
#### 按高程
**功能描述**:通过设置点云高程阈值对点云进行分类。
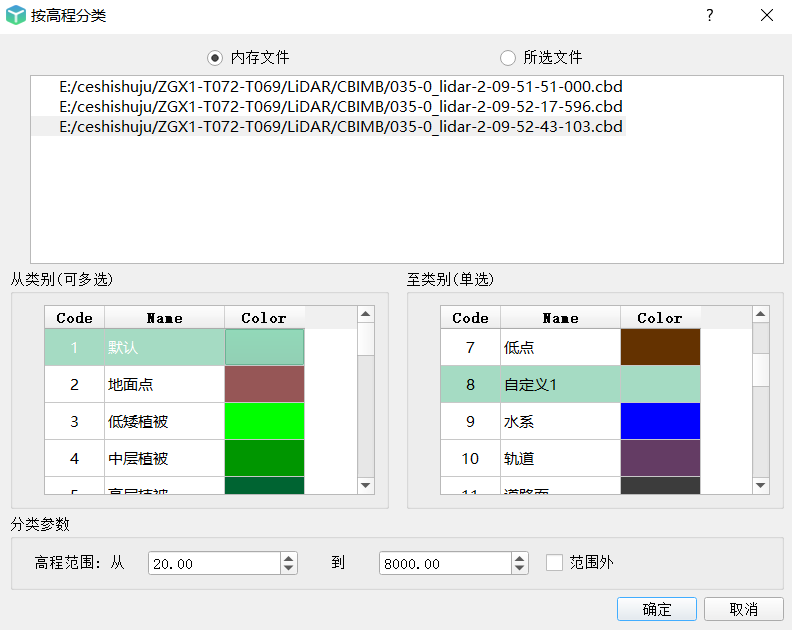
参数设置:
内存文件:在工程项目管理模块中使用 加载 功能后的文件数据,会显示在内存文件窗口中。
所选文件:在资源项目管理界面中选择的数据,会显示在所选文件窗口中。
从类别:待分类类别。
至类别:分类目标类别。
高程范围:(默认从20m到8000m)对高程范围内的点进行分类;勾选后,则是对所设置的高程范围之外的点云进行分类。
#### 按强度
**功能描述:**通过设置点云强度阈值对点云进行分类。
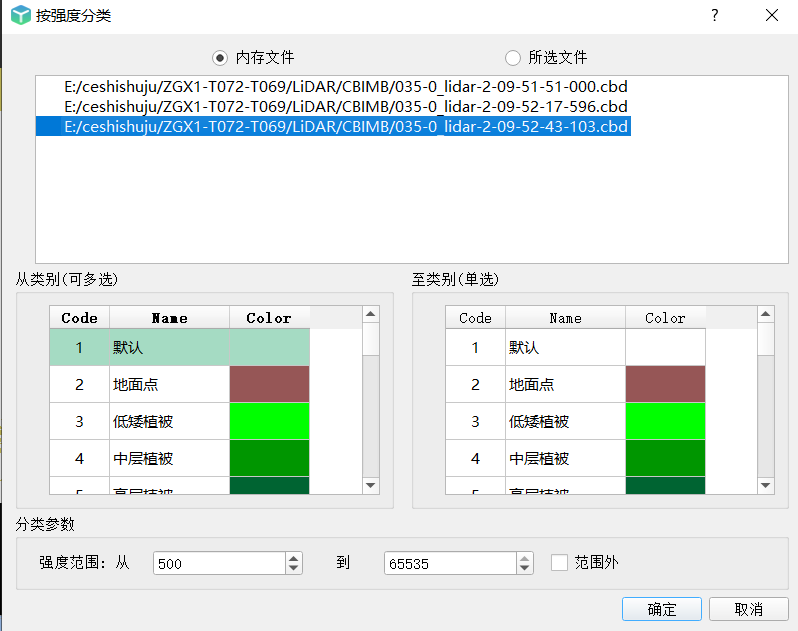
参数设置:
内存文件:在工程项目管理模块中使用 加载 功能后的文件数据,会显示在内存文件窗口中。
所选文件:在资源项目管理界面中选择的数据,会显示在所选文件窗口中。
从类别:待分类类别。
至类别:分类目标类别。
强度范围:(默认从“500”到“65535(最大值)”)对强度范围内的点进行分类;勾选后,则是对所设置的强度范围之外的点云进行分类。
#### 离群点检测
**功能描述:**通过统计学滤波算法,对稀疏离散的点云进行分类。
参数设置:
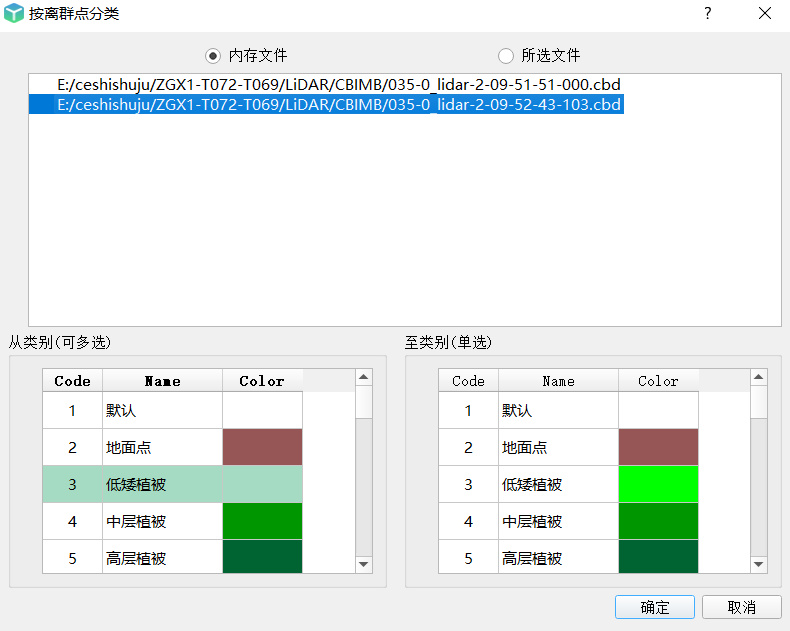
内存文件:在工程项目管理模块中使用 加载 功能后的文件数据,会显示在内存文件窗口中。
所选文件:在资源项目管理界面中选择的数据,会显示在所选文件窗口中。
从类别:待分类类别。
至类别:分类目标类别。
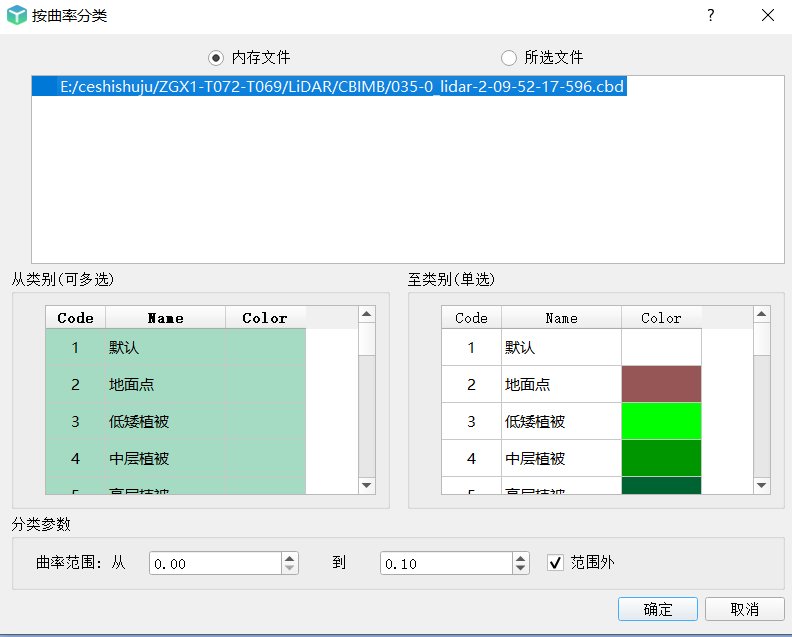
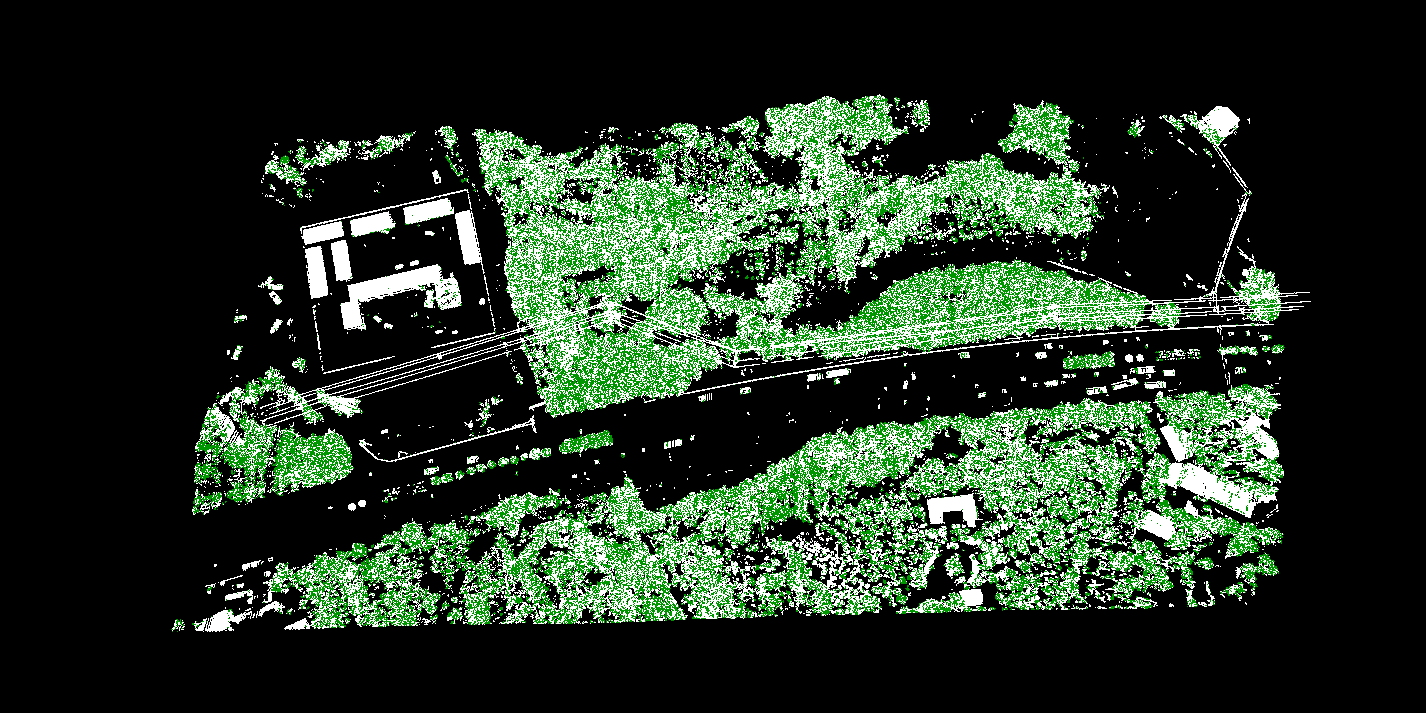
#### 按曲率
**功能描述**:可用于植被点云的分类。遍历点云中的点,计算出单个点的曲率,再与曲率阈值进行比较,对默认在阈值范围外的植被点云进行分类。
参数设置:
内存文件:在工程项目管理模块中使用 加载 功能后的文件数据,会显示在内存文件窗口中。
所选文件:在资源项目管理界面中选择的数据,会显示在所选文件窗口中。
从类别:待分类类别。
至类别:分类目标类别。
曲率范围:(默认从0.00到0.10,默认)对在曲率范围之外的点云进行分类;取消勾选则对所在曲率范围内的点进行分类。
#### 按线性度
**功能描述:**用于提取线状点云。遍历点云中的点,计算出单个点的线性度,再与线性度阈值进行比较,默认对范围外的点云进行分类,此算法适用于提取线状点云。

参数设置:
内存文件:在工程项目管理模块中使用 加载 功能后的文件数据,会显示在内存文件窗口中。
所选文件:在资源项目管理界面中选择的数据,会显示在所选文件窗口中。
从类别:待分类类别。
至类别:分类目标类别。
线性度范围:(默认从0.00到0.10,默认)对在线性度范围外的点云进行分类,取消勾选则对所在线性度范围内的点进行分类。
最大水平角:(默认10.0°)待提取线与水平面最大夹角,选取在此夹角范围内的点。
领域点数:(默认为30)判断待提取线最少点数,选取大于此点数的线。
#### 按平面度
**功能描述:**用于提取面状点云。遍历点云中的点,计算出单给点的平面度,再与平面度阈值进行比较,默认对范围外的点进行分类,取消勾选则对所在线性度范围内的点进行分类。
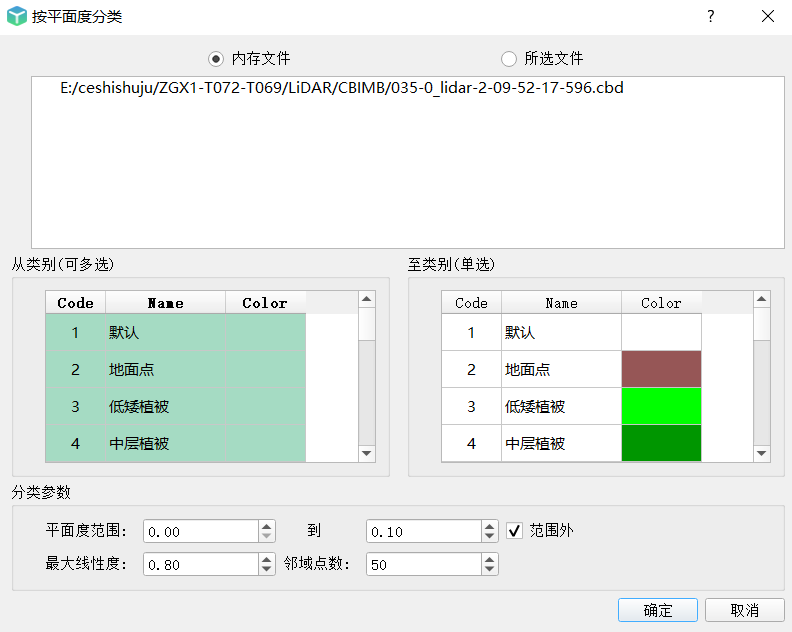
参数设置:
内存文件:在工程项目管理模块中使用 加载 功能后的文件数据,会显示在内存文件窗口中。
所选文件:在资源项目管理界面中选择的数据,会显示在所选文件窗口中。
从类别:待分类类别。
至类别:分类目标类别。
平面度范围:(默认范围从0.00到0.20,默认),对在平面度范围外的点云进行分类,取消勾选则对所在平面度范围内的点进行分类。
最大线性度:(默认0.40),对线性度小于最大线性度的平面进行分类
领域点数:判断待提取线最少点数,选取大于此点数的平面。