
[TOC]
# <span style="font-size:15px">**构建介绍**</span>
1. Dockerfile中所用的所有文件一定要和Dockerfile文件在同一级父目录下,可以为Dockerfile父目录的子目录
2. Dockerfile中相对路径默认都是Dockerfile所在的目录
3. Dockerfile中每一条指令被视为一层,执行顺序从上至下,每一个指令都会创建一个新的镜像层,并提交
# <span style="font-size:15px">**指令介绍**</span>
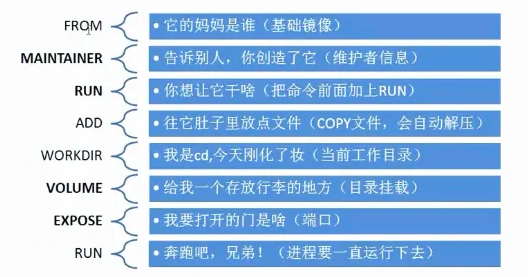
## <span style="font-size:15px">**FROM**</span>
指定基础镜像,并且必须是第一条指令。
如果不以任何镜像为基础,那么写法为:FROM scratch。
```
FROM <image>
FROM <image>:<tag>
FROM <image>:<digest>
其中<tag>和<digest> 是可选项,默认值为latest
```
## <span style="font-size:15px">**MAINTAINER**</span>
指定作者,国际标准为姓名加邮箱
```
MAINTAINER <name>
```
## <span style="font-size:15px">**LABEL**</span>
LABEL 指令用来给镜像添加一些元数据(metadata),以键值对的形式。
LABEL会继承基础镜像种的LABEL,如遇到key相同,则值覆盖。
```
// 语法格式如下:
LABEL <key>=<value> <key>=<value> <key>=<value> ...
// 添加作者
LABEL org.opencontainers.image.authors="cy"
```
## <span style="font-size:15px">**ADD**</span>
ADD 指令和 COPY 的使用格类似(同样需求下,官方推荐使用 COPY)。功能也类似,不同之处如下:
* ADD 的优点:在执行 为 tar 压缩文件的话,压缩格式为 gzip, bzip2 以及 xz 的情况下,会自动复制并解压到目标路径。
* ADD 的缺点:在不解压的前提下,无法复制 tar 压缩文件。会令镜像构建缓存失效,从而可能会令镜像构建变得比较缓慢。具体是否使用,可以根据是否需要自动解压来决定。
**说明:**
1. 路径的填写可以是容器内的绝对路径,也可以是相对于工作目录的相对路径,推荐写成绝对路径
2. 可以是一个本地文件或者是一个本地压缩文件,还可以是一个url
3. 如果把写成一个url,那么ADD就类似于wget命令
```
// src为一个目录的时候,会自动把目录下的文件复制过去,目录本身不会复制
// 如果src为多个文件,dest一定要是一个目录
ADD <src>... <dest>
ADD ["<src>",... "<dest>"]
ADD test relativeDir/
ADD test /relativeDir
ADD http://example.com/foobar /
```
## <span style="font-size:15px">**COPY**</span>
* COPY 指令从 <src> 复制新文件、目录或远程文件 URL,并将它们添加到路径 <dest>
* 可以指定多个 <src> 资源,但如果它们是文件或目录,则它们的路径被解析为相对于构建上下文的源
* 每个 <src> 可能包含通配符,匹配将使用 Go 的 filepath.Match 规则完成
* <dst\>是绝对路径,或相对于 WORKDIR 的路径
```
COPY [--chown=<user>:<group>] <源路径1>... <目标路径>
COPY [--chown=<user>:<group>] ["<源路径1>",... "<目标路径>"]
```
**通配符用法:**
* \* 通配符:把所有 hom 开头的文件复制到镜像文件系统的 /mydir/ 目录下
~~~
COPY hom* /mydir/
~~~
* \* ? 通配符:?匹配 0 或 1 个字符,比如会把 home.txt 文件复制到 /mydir/ 目录下
```
COPY hom?.txt /mydir/
```
**注意:**
* <src\>路径必须在构建的上下文中:不能添加 ../something 、 /something ,因为docker构建的第一步是将上下文目录(和子目录)发送到 docker 守护进程
```
# test.txt 是相对路径,相对于构建上下文
COPY test.txt /mkdir/
# 错误写法,文件均不在上下文目录中,并不会被找到
# 这个找的就是构建上下文的上级目录的 test.txt
COPY ../test.txt /mkdir/
# 这个找的是本机根目录下的 test.txt
COPY /test.txt /mkdir/
```
* <src\>是目录,则复制目录的全部内容,不会复制目录本身 `COPY dir /mydir/`
* <dst\> 必须是一个目录,并且必须以斜杠/ 结尾
* <dst\> 不以斜杠结尾,将被视为常规文件,并且 <src\>的内容将写入<dst\>
* <dst\>不存在时,会自动创建
## <span style="font-size:15px">**EXPOSE**</span>
仅仅只是声明端口。
作用:
* 帮助镜像使用者理解这个镜像服务的守护端口,以方便配置映射。
* 在运行时使用随机端口映射时,也就是 docker run -P 时,会自动随机映射 EXPOSE 的端口。
```
EXPOSE <端口1> [<端口2>...]
```
## <span style="font-size:15px">**ENV**</span>
设置环境变量,定义了环境变量,那么在后续的指令中,就可以使用这个环境变量。
```
ENV <key> <value>
ENV <key1>=<value1> <key2>=<value2>...
```
在Dockerfile中使用变量的方式
* $varname
* ${varname}
* ${varname:-default value}:当变量不存在使用-号后面的值
* $(varname:+default value}:当变量存在时使用+号后面的值(当然不存在也是使用后面的值)
## <span style="font-size:15px">**RUN**</span>
用于执行后面跟着的命令行命令。有以下俩种格式:
```
RUN <命令行命令> // shell格式,<命令行命令> 等同于,在终端操作的 shell 命令。
RUN ["可执行文件", "参数1", "参数2"] // exec 格式
// 例子:
RUN ["./test.php", "dev", "offline"] 等价于 RUN ./test.php dev offline
```
**注意:**
Dockerfile 的指令每执行一次都会在 docker 上新建一层。所以过多无意义的层,会造成镜像膨胀过大。
```
// 此操作执行会创建 3 层镜像
FROM centos
RUN yum -y install wget
RUN wget -O redis.tar.gz "http://download.redis.io/releases/redis-5.0.3.tar.gz"
RUN tar -xvf redis.tar.gz
// 简化后效果一致,且只会创建1层镜像
FROM centos
RUN yum -y install wget \
&& wget -O redis.tar.gz "http://download.redis.io/releases/redis-5.0.3.tar.gz" \
&& tar -xvf redis.tar.gz
```
## <span style="font-size:15px">**CMD**</span>
类似于 RUN 指令,用于运行程序,但二者运行的时间点不同:
* CMD 在docker run 时运行。
* RUN 是在 docker build。
**作用**:为启动的容器指定默认要运行的程序,程序运行结束,容器也就结束。CMD 指令指定的程序可被 docker run 命令行参数中指定要运行的程序所覆盖。
**注意**:如果 Dockerfile 中如果存在多个 CMD 指令,仅最后一个生效。
```
CMD <shell 命令>
CMD ["<可执行文件或命令>","<param1>","<param2>",...]
CMD ["<param1>","<param2>",...] # 该写法是为 ENTRYPOINT 指令指定的程序提供默认参数
```
## <span style="font-size:15px">**ENTRYPOINT**</span>
容器启动时运行的启动命令。
> 类似于 CMD 指令,但其不会被 docker run 的命令行参数指定的指令所覆盖,而且这些命令行参数会被当作参数送给 ENTRYPOINT 指令指定的程序。
> 但是, 如果运行 docker run 时使用了 --entrypoint 选项,将覆盖 ENTRYPOINT 指令指定的程序。
**优点**:在执行 docker run 的时候可以指定 ENTRYPOINT 运行所需的参数。
**注意**:如果 Dockerfile 中如果存在多个 ENTRYPOINT 指令,仅最后一个生效。
**与CMD的区别:**
* ENTRYPOINT不会被运行的command覆盖,而CMD则会被覆盖
* 如果在Dockerfile种同时写了ENTRYPOINT和CMD,并且CMD指令不是一个完整的可执行命令,那么CMD指定的内容将会作为ENTRYPOINT的参数;如果CMD是一个完整的指令,那么它们两个会互相覆盖,谁在最后谁生效
```
ENTRYPOINT ["<executeable>","<param1>","<param2>",...]
// 实例:
1、Dockerfile 构建了 nginx:test 镜像
FROM nginx
ENTRYPOINT ["nginx", "-c"] # 定参
CMD ["/etc/nginx/nginx.conf"] # 变参
2、不传参运行,容器内会默认运行以下命令,启动主进程。
$ docker run nginx:test // nginx -c /etc/nginx/nginx.conf
3、传参运行,容器内会默认运行以下命令,启动主进程(/etc/nginx/new.conf:假设容器内已有此文件)
$ docker run nginx:test -c /etc/nginx/new.conf // nginx -c /etc/nginx/new.conf
```
## <span style="font-size:15px">**VOLUME**</span>
定义匿名数据卷。在启动容器时忘记挂载数据卷,会自动挂载到匿名卷。
作用:
* 避免重要的数据,因容器重启而丢失,这是非常致命的。
* 避免容器不断变大。
```
VOLUME ["<路径1>", "<路径2>"...]
VOLUME <路径>
```
## <span style="font-size:15px">**USER**</span>
用于指定执行后续命令的用户和用户组,这边只是切换后续命令执行的用户(用户和用户组必须提前已经存在)。
```
USER <用户名>[:<用户组>]
```
## <span style="font-size:15px">**WORKDIR**</span>
指定工作目录。用 WORKDIR 指定的工作目录,会在构建镜像的每一层中都存在。(WORKDIR 指定的工作目录,必须是提前创建好的)。
docker build 构建镜像过程中的,每一个 RUN 命令都是新建的一层。只有通过 WORKDIR 创建的目录才会一直存在。
```
WORKDIR <工作目录路径>
```
## <span style="font-size:15px">**ARG**</span>
构建参数,与 ENV 作用一致。不过作用域不一样。ARG 设置的环境变量仅对 Dockerfile 内有效,也就是说只有 docker build 的过程中有效,构建好的镜像内不存在此环境变量。
构建命令 docker build 中可以用` --build-arg <参数名>=<值> `来覆盖。
```
ARG <参数名>[=<默认值>]
```
## <span style="font-size:15px">**ONBUILD**</span>
用于延迟构建命令的执行。
简单的说,就是 Dockerfile 里用 ONBUILD 指定的命令,在本次构建镜像的过程中不会执行(假设镜像为 test-build)。当有新的 Dockerfile 使用了之前构建的镜像 FROM test-build ,这时执行新镜像的 Dockerfile 构建时候,会执行 test-build 的 Dockerfile 里的 ONBUILD 指定的命令。
```
ONBUILD <其它指令>
```
## <span style="font-size:15px">**STOPSIGNAL**</span>
STOPSIGNAL命令是的作用是当容器停止时给系统发送什么样的指令,默认是15
```
STOPSIGNAL signal
```
## <span style="font-size:15px">**HEALTHCHECK**</span>
用于指定某个程序或者指令来监控 docker 容器服务的运行状态。
HEALTHCHECK命令只能出现一次,如果出现了多次,只有最后一个生效。
```
HEALTHCHECK [选项] CMD <命令>:设置检查容器健康状况的命令
HEALTHCHECK NONE:如果基础镜像有健康检查指令,使用这行可以屏蔽掉其健康检查指令
HEALTHCHECK [选项] CMD <命令> : 这边 CMD 后面跟随的命令使用,可以参考 CMD 的用法。
```
选项支持以下三种:
* –interval=DURATION 两次检查默认的时间间隔为30秒
* –timeout=DURATION 健康检查命令运行超时时长,默认30秒
* –retries=N 当连续失败指定次数后,则容器被认为是不健康的,状态为unhealthy,默认次数是3
CMD后边的命令的返回值决定了本次健康检查是否成功,具体的返回值如下:
* 0: success - 表示容器是健康的
* 1: unhealthy - 表示容器已经不能工作了
* 2: reserved - 保留值
- PHP
- PHP基础
- PHP介绍
- 如何理解PHP是弱类型语言
- 超全局变量
- $_SERVER详解
- 字符串处理函数
- 常用数组函数
- 文件处理函数
- 常用时间函数
- 日历函数
- 常用url处理函数
- 易混淆函数区别(面试题常见)
- 时间戳
- PHP进阶
- PSR规范
- RESTFUL规范
- 面向对象
- 三大基本特征和五大基本原则
- 访问权限
- static关键字
- static关键字
- 静态变量与普通变量
- 静态方法与普通方法
- const关键字
- final关键字
- abstract关键字
- self、$this、parent::关键字
- 接口(interface)
- trait关键字
- instanceof关键字
- 魔术方法
- 构造函数和析构函数
- 私有属性的设置获取
- __toString()方法
- __clone()方法
- __call()方法
- 类的自动加载
- 设计模式详解
- 关于设计模式的一些建议
- 工厂模式
- 简单工厂模式
- 工厂方法模式
- 抽象工厂模式
- 区别和适用范围
- 策略模式
- 单例模式
- HTTP
- 定义
- 特点
- 工作过程
- request
- response
- HTTP状态码
- URL
- GET和POST的区别
- HTTPS
- session与cookie
- 排序算法
- 冒泡排序算法
- 二分查找算法
- 直接插入排序算法
- 希尔排序算法
- 选择排序算法
- 快速排序算法
- 循环算法
- 递归与尾递归
- 迭代
- 日期相关的类
- DateTimeInterface接口
- DateTime类
- DateTimeImmutable类
- DateInterval类
- DateTimeZone类
- DatePeriod类
- format参数格式
- DateInterval的format格式化参数
- 预定义接口
- ArrayAccess(数组式访问)接口
- Serializable (序列化)接口
- Traversable(遍历)接口
- Closure类
- Iterator(迭代器)接口
- IteratorAggregate(聚合迭代器) 接口
- Generator (生成器)接口
- composer
- composer安装与使用
- python
- python3执行tarfile解压文件报错:tarfile.ReadError:file could not be opened successfully
- golang
- 单元测试
- 单元测试框架
- Golang内置testing包
- GoConvey库
- testify库
- 打桩与mock
- GoMock框架
- Gomonkey框架
- HTTP Mock
- httpMock
- mux库/httptest
- 数据库
- MYSQL
- SQL语言的分类
- 事务(重点)
- 索引
- 存储过程
- 触发器
- 视图
- 导入导出数据库
- 优化mysql数据库的方法
- MyISAM与InnoDB区别
- 外连接、内连接的区别
- 物理文件结构
- PostgreSQL
- 编译安装
- pgsql常用命令
- pgsql应用目录(bin目录)文件结构解析
- pg_ctl
- initdb
- psql
- clusterdb
- cluster命令
- createdb
- dropdb
- createuser
- dropuser
- pg_config
- pg_controldata
- pg_checksums
- pgbench
- pg_basebackup
- pg_dump
- pg_dumpall
- pg_isready
- pg_receivewal
- pg_recvlogical
- pg_resetwal
- pg_restore
- pg_rewind
- pg_test_fsync
- pg_test_timing
- pg_upgrade
- pg_verifybackup
- pg_archivecleanup
- pg_waldump
- postgres
- reindexdb
- vacuumdb
- ecpg
- pgsql数据目录文件结构解析
- pgsql数据目录文件结构解析
- postgresql.conf解析
- pgsql系统配置参数说明
- pgsql索引类型
- 四种索引类型解析
- 索引之ctid解析
- 索引相关操作
- pgsql函数解析
- pgsql系统函数解析
- pgsql窗口函数解析
- pgsql聚合函数解析
- pgsql系统表解析
- pg_stat_all_indexes
- pg_stat_all_tables
- pg_statio_all_indexes
- pg_statio_all_tables
- pg_stat_database
- pg_stat_statements
- pg_extension
- pg_available_extensions
- pg_available_extension_versions
- pgsql基本原理
- 进程和内存结构
- 存储结构
- 数据文件的内部结构
- 垃圾回收机制VACUUM
- 事务日志WAL
- 并发控制
- 介绍
- 事务ID-txid
- 元组结构-Tuple Structure
- 事务状态记录-Commit Log (clog)
- 事务快照-Transaction Snapshot
- 事务快照实例
- 事务隔离
- 事务隔离级别
- 读已提交-Read committed
- 可重复读-Repeatable read
- 可序列化-Serializable
- 读未提交-Read uncommitted
- 锁机制
- 扩展机制解析
- 扩展的定义
- 扩展的安装方式
- 自定义创建扩展
- 扩展的管理
- 扩展使用实例
- 在pgsql中使用last、first聚合函数
- pgsql模糊查询不走索引的解决方案
- pgsql的pg_trgm扩展解析与验证
- 高可用
- LNMP
- LNMP环境搭建
- 一键安装包
- 搭建方法
- 配置文件目录
- 服务器管理系统
- 宝塔(Linux)
- 安装与使用
- 开放API
- 自定义apache日志
- 一键安装包LNMP1.5
- LNMP1.5:添加、删除站点
- LNMP1.5:php多版本切换
- LNMP1.5 部署 thinkphp项目
- Operation not permitted解决方法
- Nginx
- Nginx的产生
- 正向代理和反向代理
- 负载均衡
- Linux常用命令
- 目录与文件相关命令
- 目录操作命令
- 文件编辑命令
- 文件查看命令
- 文件查找命令
- 文件权限命令
- 文件上传下载命令
- 用户和群组相关命令
- 用户与用户组的关系
- 用户相关的系统配置文件
- 用户相关命令
- 用户组相关命令
- 压缩与解压相关命令
- .zip格式
- .tar.gz格式
- .gz格式
- .bz2格式
- 查看系统版本
- cpuinfo详解
- meminfo详解
- getconf获取系统信息
- 磁盘空间相关命令
- 查看系统负载情况
- 系统环境变量
- 网络相关命令
- ip命令详解
- ip命令格式详解
- ip address命令详解
- ip link命令详解
- ip rule命令详解
- ip route命令详解
- nslookup命令详解
- traceroute命令详解
- netstat命令详解
- route命令详解
- tcpdump命令详解
- 系统进程相关命令
- ps命令详解
- pstree命令详解
- kill命令详解
- 守护进程-supervisord
- 性能监控相关命令
- top命令详解
- iostat命令详解
- pidstat命令详解
- iotop命令详解
- mpstat命令详解
- vmstat命令详解
- ifstat命令详解
- sar命令详解
- iftop命令详解
- 定时任务相关命令
- ssh登录远程主机
- ssh口令登录
- ssh公钥登录
- ssh带密码登录
- ssh端口映射
- ssh配置文件
- ssh安全设置
- 历史纪录
- history命令详解
- linux开启操作日志记录
- 拓展
- git
- git初始化本地仓库-https
- git初始化仓库-ssh
- git-查看和设置config配置
- docker
- 概念
- docker原理
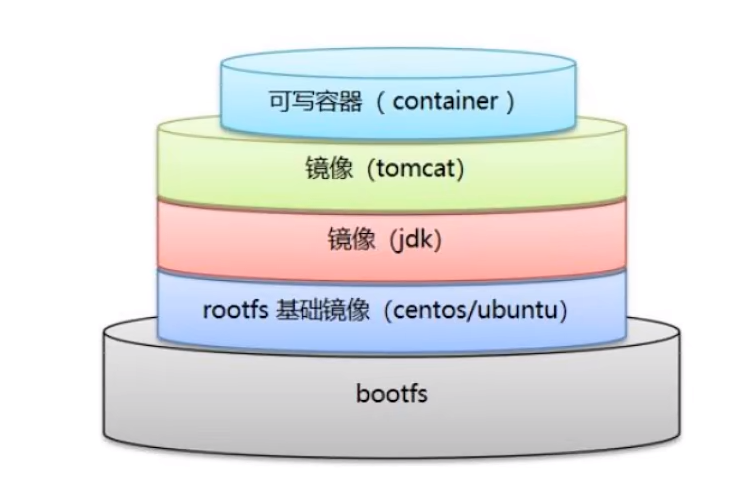
- docker镜像原理
- docker Overlay2 文件系统原理
- docker日志原理
- docker日志驱动
- docker容器日志管理
- 原理论证
- 验证容器的启动是作为Docker Daemon的子进程
- 验证syslog类型日志驱动
- 验证journald类型日志驱动
- 验证local类型日志驱动
- 修改容器的hostname
- 修改容器的hosts
- 验证联合挂载技术
- 验证启动多个容器对于磁盘的占用情况
- 验证写时复制原理
- 验证docker内容寻址原理
- docker存储目录
- /var/lib/docker目录
- image目录
- overlay2目录
- 数据卷
- 具名挂载和匿名挂载
- 数据卷容器
- Dockerfile详解
- dockerfile指令详解
- 实例:构造centos
- 实例:CMD和ENTRYPOINT的区别
- docker网络详解
- docker-compose
- 缓存
- redis
- redis的数据类型和应用场景
- redis持久化
- RDB持久化
- AOF持久化
- redis缓存穿透、缓存击穿、缓存雪崩
- 常见网络攻击类型
- CSRF攻击
- XSS攻击
- SQL注入
- Cookie攻击
- 历史项目经验
- 图片上传项目实例
- 原生php上传方法实例
- base64图片流
- tp5的上传方法封装实例
- 多级关系的递归查询
- 数组转树结构
- thinkphp5.1+ajax实现导出Excel
- JS 删除数组的某一项
- 判断是否为索引数组
- ip操作