[TOC]
*******
## 【1】虚拟3D工厂设计功能
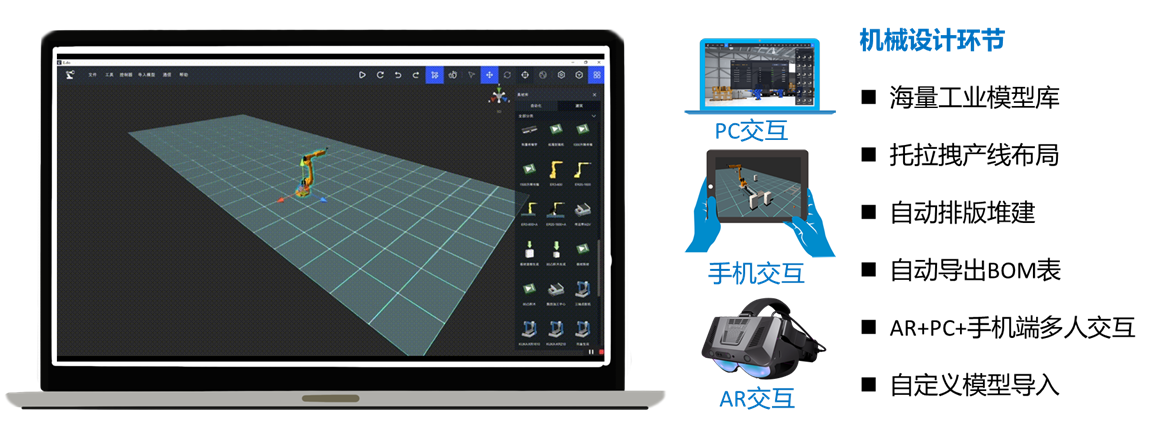
>IOA具有丰富的工业模型库,包含工业机器人、移动机器人、桁架机械手、物流传输、传感器等,并且每个模型都支持用户自定义设置其坐标、角度、参数尺寸等,能够通过便携化的3D交互托拉拽建设3D场景应用;
>IOA的3D自定义设置功能具有丰富的交互属性,包含了对模型的复制、撤销、批量阵列黏贴等多种功能,场景工程可本地保存并快速形成对应的工程文件;
## 【2】自定义模块化机器人设计功能
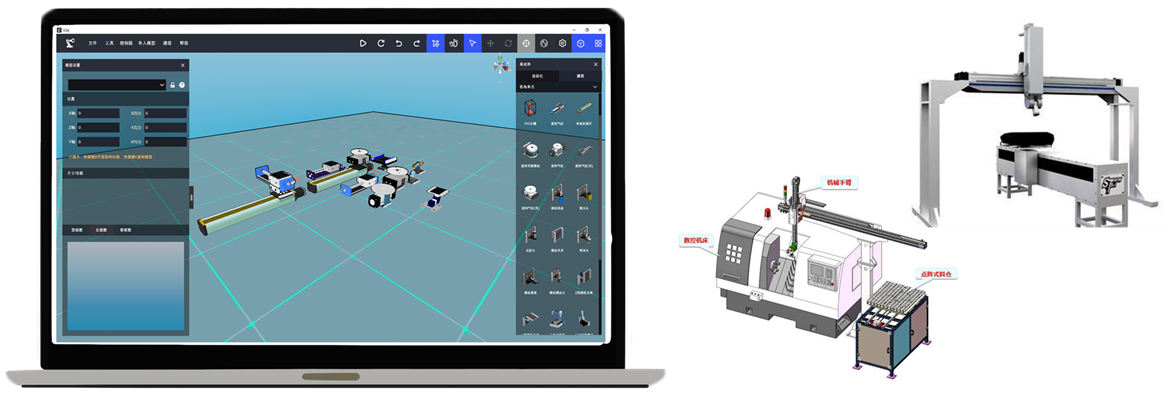
>IOA具有丰富的气动、伺服导轨、关节伺服以及夹具等机器人部件,能够支持用户自定义的进行各类工业机械臂的传动结构3D设计,系统能够根据模块化拼接形成联动结构的控制及应用,从而形成对于机器人的运动控制和各类结构算法的机器人应用实训与仿真;
## 【3】模型库导入功能
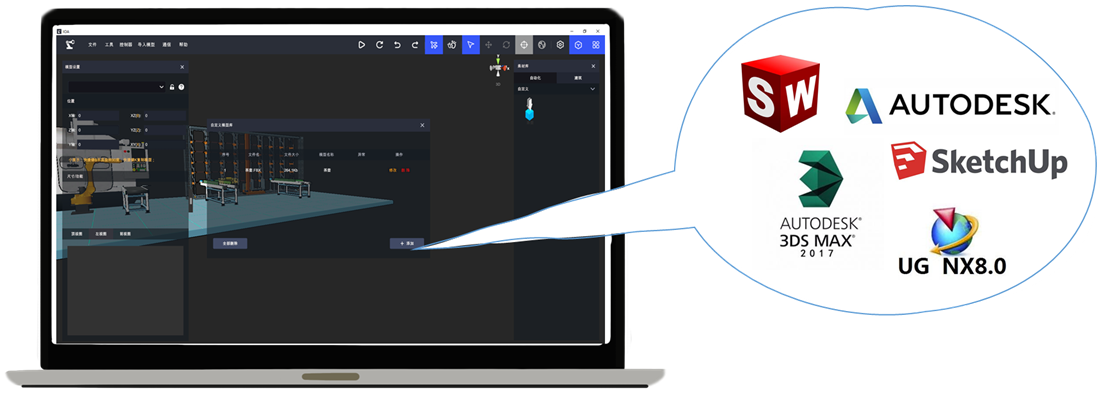
>IOA支持用户自定义模型库导入,且支持多种模型文件包含FBX、OBJ、3MF、STL、GLTF2以及ZIP等文件格式,能够建立用户自定义的专属模型库,每个模型导入后可自定义设置其坐标、比例尺寸、图标等功能模块;
## 【4】虚拟电气接线功能

>IOA具有丰富的电气控制接线及虚拟端子功能,即支持用户自定义配置IO、模拟量、伺服以及运动端子的接线,通过拖拽式接线能够完成多个及多种控制器与虚拟世界的控制映射,能够1:1的将控制器与被控设备连接控制,系统支持用户自定义添加控制器、自定义虚拟接线、以及进行对工程的接线工程保存、导出Excel等功能;
## 【5】智能孪生仿真控制功能
:-: 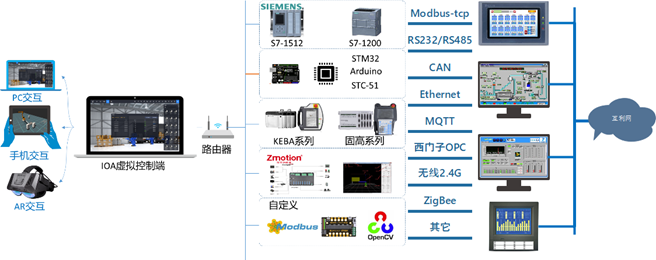
IOA虚拟仿真支持虚拟和真实的多种控制器实时仿真及混合仿真,通过虚实孪生技术,将虚拟工厂的机电系统与真实的工业自动化控制系统打通,以丰富的3D虚拟交互形式,从而实现对智慧工厂电气配线、网络配置、控制教学、组态编程实训应用等目的。
| 序号 | 系列 | 控制系统 |真实控制器 |虚拟控制器 |
| --- | --- | --- |--- |--- |
| 1 | 机器人 | KEBA机器人 |支持 |支持 |
| 2 | 机器人 | 固高示教器 |支持 |无 |
| 3 | 机器人 | 纳博特控制器 |支持 |支持 |
| 4 | 机器人 | 正运动控制器 |支持 |支持 |
| 5 | 机器人 | Python机器人 |无 |支持 |
| 6 | 机器人 | ABB机器人 |支持 |支持 |
| 7 | PLC系统 | 西门子S7-1200 |支持 |支持 |
| 8 | PLC系统 | 西门子S7-1500 |支持 |支持 |
| 9 | PLC系统 | 三菱PLC |支持 |支持 |
| 10 | 运动控制系统 | 正运动ZMC |支持 |支持 |
| 11 | 嵌入式单片机 | Arduino-UNO |支持 |支持 |
| 12 | 嵌入式单片机 | ESP32 |支持 |支持 |
| 13 | 二次开发 | Python |无 |支持 |
| 14 | 二次开发 | JAVA |无 |支持 |
| 15 | 二次开发 | LabVIEW |无 |支持 |
| 16 | 二次开发 | C# |无 |支持 |
| 17 | 机器视觉 | LabVIEW、Python |无 |支持 |
## 【6】多人协作VR + PC +手机端仿真
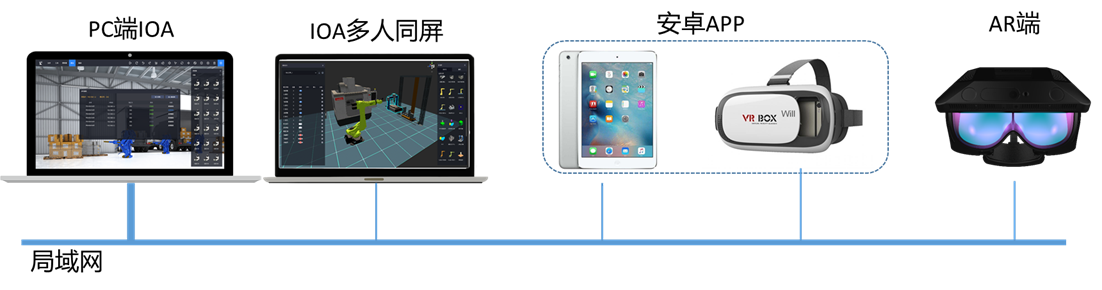
IOA支持在同一局域网内的多人同步协作仿真,包含支持有PC、安卓手机端、以及AR、VR端的多终端接入仿真,如下所述:
* PC端IOA:主设计端,可进行3D场景设计、控制器添加、电气接线仿真以及示教编程等操作;
* IOA多人同屏:PC端软件,支持同一个网段下,多人接入同一个3D虚拟工厂场景,多人协作仿真;
* 安卓APP:支持手机端进入虚拟工厂,支持手机端APP漫游模式以及VR模式,通过采用 [VR-BOX](https://item.jd.com/11063031744.html) 方式可进入VR模式仿真;
* AR端:支持realmax乾 AR眼镜,通过AR模式进入虚拟工厂,虚实在线方式仿真;
## 【7】图形化虚拟控制器功能
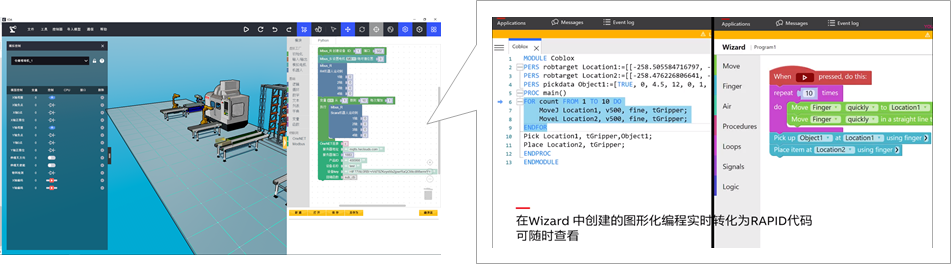
IOA内置虚拟图形化控制器,该控制器采用与ABB最新机器人编程语言即Wizard简易机器人编程通用格式的图形化块语言格式可快速建立各种虚拟控制器实现虚实仿真交互的机器人编程及PLC逻辑编程控制;
* 支持四轴码垛、SCARA、六轴串联以及六轴+A轴多种机器人示教与编程;
* 内置机器人编程语法,采用图形化格式,能够自动生成Python代码块;
* 开放SDK接口,可采用图形化模式进行仿真;
* 支持自定义机器人结构仿真编程;
* 支持机器视觉Python编程;
## 【8】机器视觉仿真功能
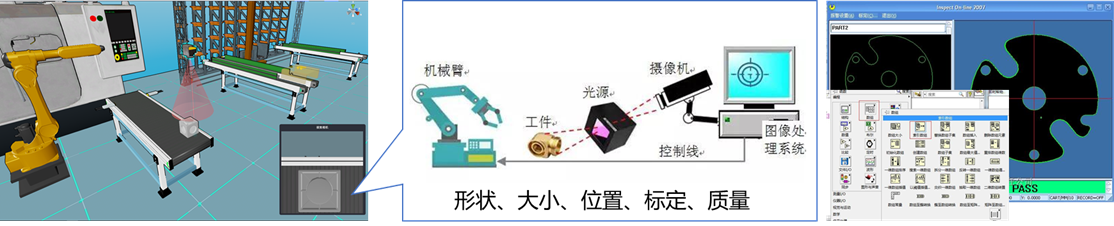
IOA内置虚拟机器视觉摄像头,支持用户自定义机器视觉软件开发,并配套开源LabVIEW机器视觉软件,系统功能如下:
* 内置虚拟机器视觉功能,可自定义视觉范围、大小以及耗材物料;
* 配置开源LabVIEW机器视觉软件,内置形状、位置检测,内置modbus-tcp通讯功能;
* 配置开源Python机器视觉图形化接口,可自定义图像检测与算法开发;
* 配套机器视觉摄像头开发通讯SDK接口,包含C#、Python、LabVIEW以及通讯协议接口;
* 配套机器视觉案例手册及开发指导教程;
## 【9】移动机器人仿真功能

IOA内置虚拟AGV控制及仿真功能,包含有寻磁式AGV、叉车AGV以及复合机器人结构的AGV系统,功能如下:
* 移动机器人3D仿真系统:内置有叉车AGV、滚筒AGV、顶升AGV以及复合机器人AGV等多种移动机器人模型,并配套AGV虚拟寻磁导轨铺设功能,RFID机器人站铺设功能,可1:1仿真真实的AGV机器人的部署及控制仿真;
* 配套开源AGV移动机器人虚拟控制软件:包含手机APP移动AGV运行与监控、移动机器人PID调节控制,可通过Python编程实现虚拟AGV的调度与管理控制;
* 配套开源移动AGV的PLC控制源码:通过虚拟/真实的PLC实现AGV运行的远程调度及管理控制功能,开源PLC及控制系统源码;
* 配套开源移动AGV的单片机源码:通过真实的单片机控制器实现AGV的管理及控制功能;
* AGV机器人视觉仿真:配置有虚拟AGV机器视觉,可通过SDK或Python实现AGV视觉的人工智能功能;
## 【10】嵌入式物联网仿真功能
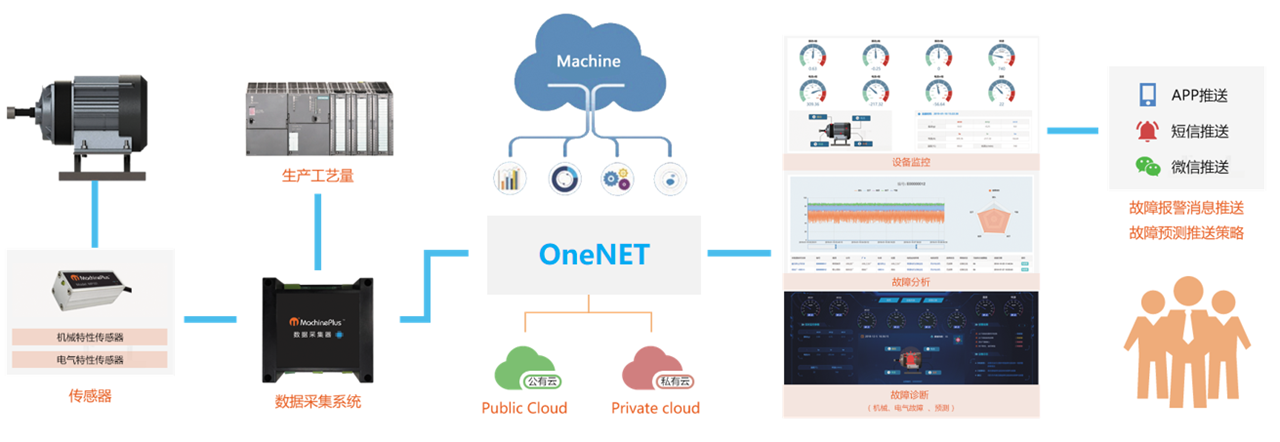
IOA配置完整的工业物联网仿真及编程控制功能,用户可选择真实的物联网控制器,或虚拟的Python物联网控制器,通过连接物联网云端实现设备物联网,可实现web数据可视化、数字化功能及仿真,系统功能说明如下:
* 可选配物联网开发硬件嵌入式包:包含ESP32智能网关控制器、人机交互液晶屏、按钮遥控器、手柄以及配件包;
* 配套虚拟物联网控制器,内置图形化编程语言、配置Python语言API开发包,内置中国移动OneNET云平台开发接口;
* 配套1:1的从设备端、自动化、上位机再到云端部署监控的工业物联网开发教程;
## 【11】配套智能工厂数字化管理MES系统应用

IOA配套完成的智能工厂开发应用体系,包含从智能工厂的设备层、驱动层、控制层、数据层、再到应用层的整套数字化智能工厂的开源教程,配套1:1的MES系统及手机APP管理软件,能够形成对数字化工厂的驱动、控制、上位机编程、再到云端监控的整套课程及实训专业群建设课程;
* 系统软件案例课程:配套小型数字化工厂的3D工程、驱动控制、上位机、数据库再到WEB可视化的整套开源智能工厂源码、课程、手册以及视频讲解;
* 可根据客户的实际工厂或定制化工程场景设计数字化云MES监控;
