
# 9 -- Linear Regression
上节课,我们主要介绍了在有noise的情况下,VC Bound理论仍然是成立的。同时,介绍了不同的error measure方法。本节课介绍机器学习最常见的一种算法:Linear Regression.
### **一、线性回归问题**
在之前的Linear Classification课程中,讲了信用卡发放的例子,利用机器学习来决定是否给用户发放信用卡。本节课仍然引入信用卡的例子,来解决给用户发放信用卡额度的问题,这就是一个线性回归(Linear Regression)问题。
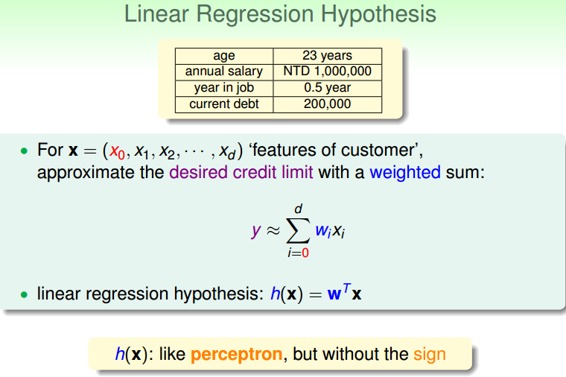
令用户特征集为d维的,加上常数项,维度为,与权重的线性组合即为Hypothesis,记为。线性回归的预测函数取值在整个实数空间,这跟线性分类不同。
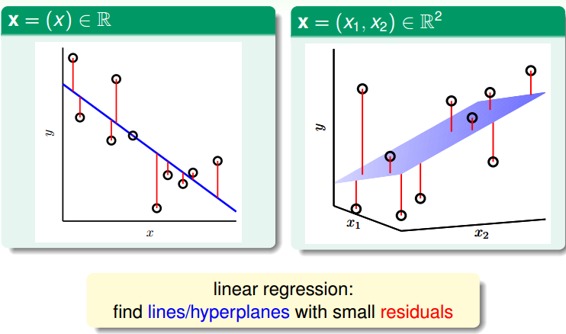
根据上图,在一维或者多维空间里,线性回归的目标是找到一条直线(对应一维)、一个平面(对应二维)或者更高维的超平面,使样本集中的点更接近它,也就是残留误差Residuals最小化。
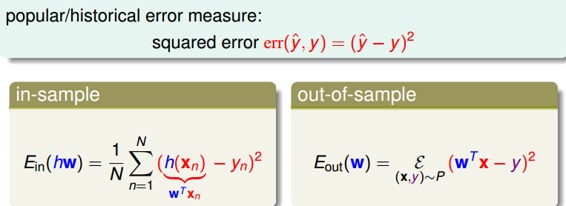
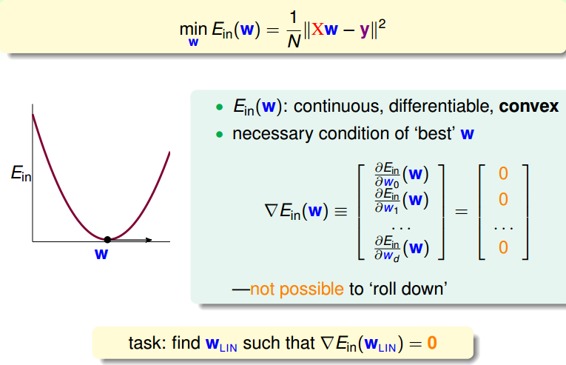
一般最常用的错误测量方式是基于最小二乘法,其目标是计算误差的最小平方和对应的权重w,即上节课介绍的squared error:
这里提一点,最小二乘法可以解决线性问题和非线性问题。线性最小二乘法的解是closed-form,即,而非线性最小二乘法没有closed-form,通常用迭代法求解。本节课的解就是closed-form的。关于最小二乘法的一些介绍,请参见我的另一篇博文:
[最小二乘法和梯度下降法的一些总结](http://blog.csdn.net/red_stone1/article/details/70306403)
### **二、线性回归算法**
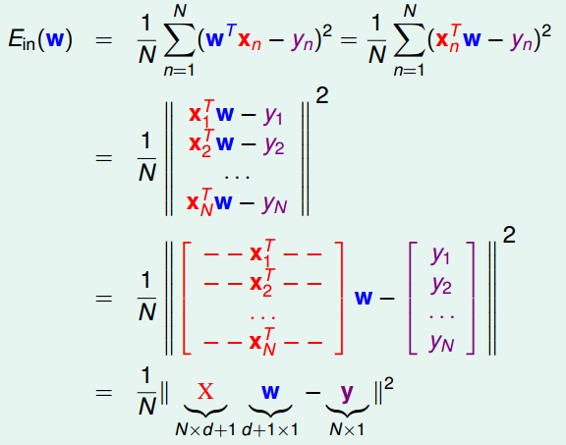
样本数据误差是权重的函数,因为和都是已知的。我们的目标就是找出合适的,使能够最小。那么如何计算呢?
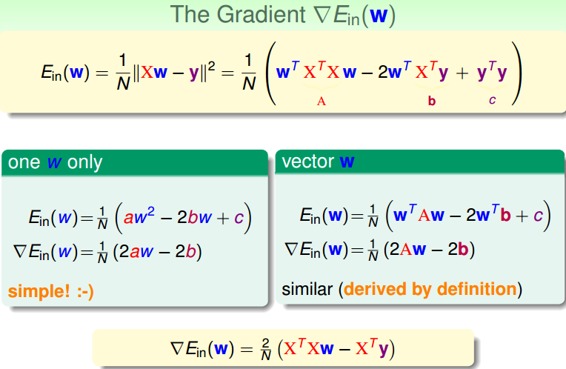
首先,运用矩阵转换的思想,将计算转换为矩阵的形式。
然后,对于此类线性回归问题,一般是个凸函数。凸函数的话,我们只要找到一阶导数等于零的位置,就找到了最优解。那么,我们将对每个求偏导,偏导为零的,即为最优化的权重值分布。
根据梯度的思想,对进行矩阵话求偏导处理:
令偏导为零,最终可以计算出权重向量为:
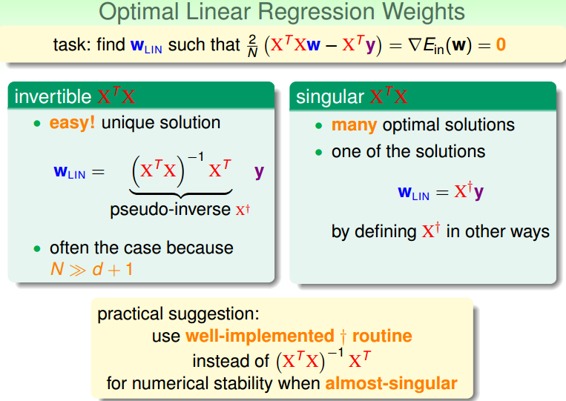
最终,我们推导得到了权重向量,这是上文提到的closed-form解。其中,又称为伪逆矩阵pseudo-inverse,记为,维度是(d+1)xN。
但是,我们注意到,伪逆矩阵中有逆矩阵的计算,逆矩阵是否一定存在?一般情况下,只要满足样本数量N远大于样本特征维度d+1,就能保证矩阵的逆是存在的,称之为非奇异矩阵。但是如果是奇异矩阵,不可逆怎么办呢?其实,大部分的计算逆矩阵的软件程序,都可以处理这个问题,也会计算出一个逆矩阵。所以,一般伪逆矩阵是可解的。
### **三、泛化问题**
现在,可能有这样一个疑问,就是这种求解权重向量的方法是机器学习吗?或者说这种方法满足我们之前推导VC Bound,即是否泛化能力强?
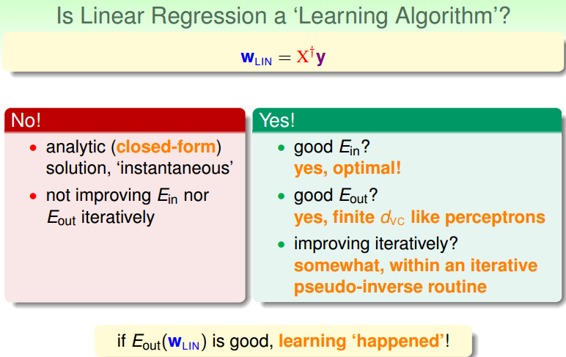
有两种观点:1、这不属于机器学习范畴。因为这种closed-form解的形式跟一般的机器学习算法不一样,而且在计算最小化误差的过程中没有用到迭代。2、这属于机器学习范畴。因为从结果上看,和都实现了最小化,而且实际上在计算逆矩阵的过程中,也用到了迭代。
其实,只从结果来看,这种方法的确实现了机器学习的目的。下面通过介绍一种更简单的方法,证明linear regression问题是可以通过线下最小二乘法方法计算得到好的和的。
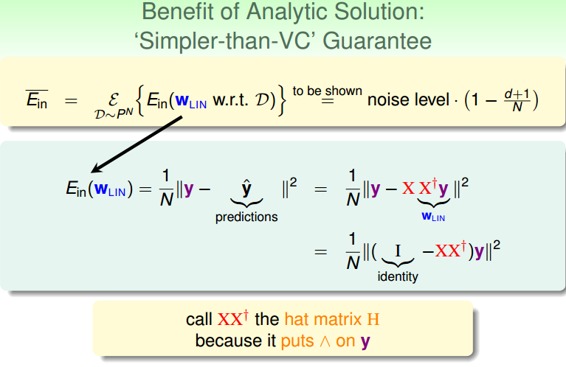
首先,我们根据平均误差的思想,把写成如图的形式,经过变换得到:
我们称为帽子矩阵,用H表示。
下面从几何图形的角度来介绍帽子矩阵H的物理意义。
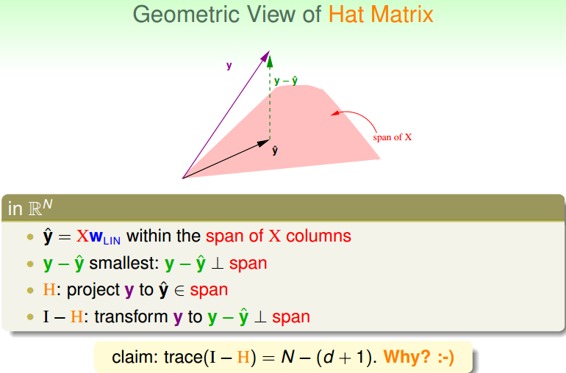
图中,y是N维空间的一个向量,粉色区域表示输入矩阵X乘以不同权值向量w所构成的空间,根据所有w的取值,预测输出都被限定在粉色的空间中。向量就是粉色空间中的一个向量,代表预测的一种。y是实际样本数据输出值。
机器学习的目的是在粉色空间中找到一个,使它最接近真实的y,那么我们只要将y在粉色空间上作垂直投影即可,投影得到的即为在粉色空间内最接近y的向量。这样即使平均误差最小。
从图中可以看出,是y的投影,已知,那么H表示的就是将y投影到的一种操作。图中绿色的箭头是向量y与相减,垂直于粉色区域。已知那么I-H表示的就是将y投影到即垂直于粉色区域的一种操作。这样的话,我们就赋予了H和I-H不同但又有联系的物理意义。
这里trace(I-H)称为I-H的迹,值为N-(d+1)。这条性质很重要,一个矩阵的 trace等于该矩阵的所有特征值(Eigenvalues)之和。下面给出简单证明:




介绍下该I-H这种转换的物理意义:原来有一个有N个自由度的向量y,投影到一个有d+1维的空间x(代表一列的自由度,即单一输入样本的参数,如图中粉色区域),而余数剩余的自由度最大只有N-(d+1)种。
在存在noise的情况下,上图变为:
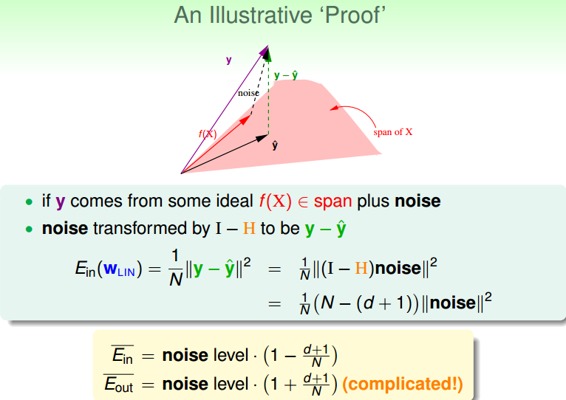
图中,粉色空间的红色箭头是目标函数f(x),虚线箭头是noise,可见,真实样本输出y由f(x)和noise相加得到。由上面推导,已知向量y经过I-H转换为,而noise与y是线性变换关系,那么根据线性函数知识,我们推导出noise经过I-H也能转换为。则对于样本平均误差,有下列推导成立:
即
同样,对有如下结论:
这个证明有点复杂,但是我们可以这样理解:与形式上只差了项,从哲学上来说,是我们看得到的样本的平均误差,如果有noise,我们把预测往noise那边偏一点,让好看一点点,所以减去项。那么同时,新的样本是我们看不到的,如果noise在反方向,那么就应该加上项。
我们把与画出来,得到学习曲线:
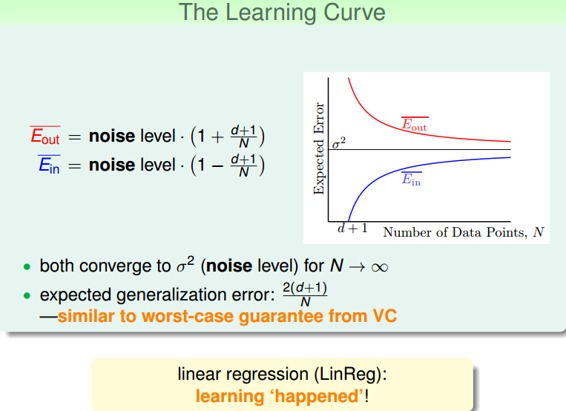
当N足够大时,与逐渐接近,满足,且数值保持在noise level。这就类似VC理论,证明了当N足够大的时候,这种线性最小二乘法是可以进行机器学习的,算法有效!
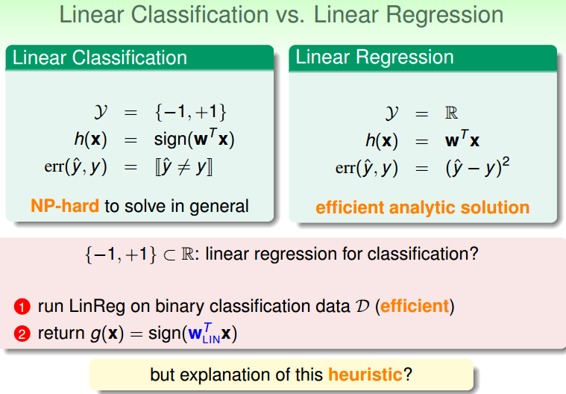
### **四、Linear Regression方法解决Linear Classification问题**
之前介绍的Linear Classification问题使用的Error Measure方法用的是0/1 error,那么Linear Regression的squared error是否能够应用到Linear Classification问题?
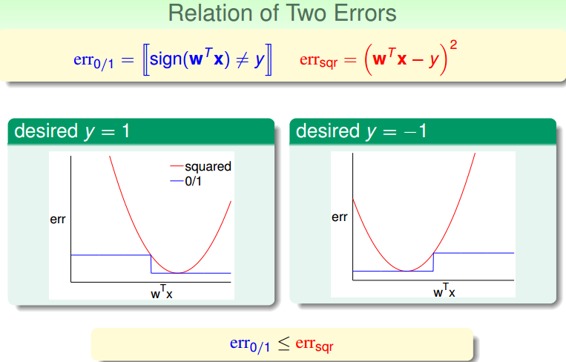
下图展示了两种错误的关系,一般情况下,squared error曲线在0/1 error曲线之上。即.
根据之前的VC理论,的上界满足:
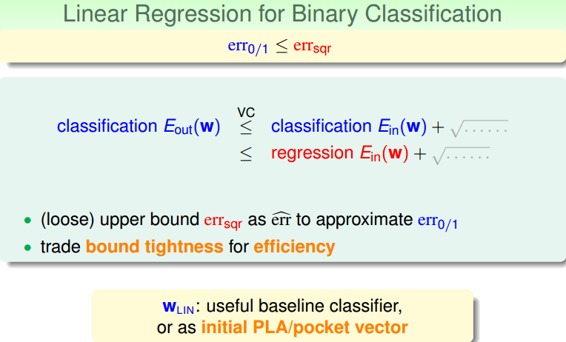
从图中可以看出,用代替,仍然有上界,只不过是上界变得宽松了。也就是说用线性回归方法仍然可以解决线性分类问题,效果不会太差。二元分类问题得到了一个更宽松的上界,但是也是一种更有效率的求解方式。
### **五、总结**
本节课,我们主要介绍了Linear Regression。首先,我们从问题出发,想要找到一条直线拟合实际数据值;然后,我们利用最小二乘法,用解析形式推导了权重w的closed-form解;接着,用图形的形式得到,证明了linear regression是可以进行机器学习的,;最后,我们证明linear regressin这种方法可以用在binary classification上,虽然上界变宽松了,但是仍然能得到不错的学习方法。
**_注明:_**
文章中所有的图片均来自台湾大学林轩田《机器学习基石》课程
- 台湾大学林轩田机器学习笔记
- 机器学习基石
- 1 -- The Learning Problem
- 2 -- Learning to Answer Yes/No
- 3 -- Types of Learning
- 4 -- Feasibility of Learning
- 5 -- Training versus Testing
- 6 -- Theory of Generalization
- 7 -- The VC Dimension
- 8 -- Noise and Error
- 9 -- Linear Regression
- 10 -- Logistic Regression
- 11 -- Linear Models for Classification
- 12 -- Nonlinear Transformation
- 13 -- Hazard of Overfitting
- 14 -- Regularization
- 15 -- Validation
- 16 -- Three Learning Principles
- 机器学习技法
- 1 -- Linear Support Vector Machine
- 2 -- Dual Support Vector Machine
- 3 -- Kernel Support Vector Machine
- 4 -- Soft-Margin Support Vector Machine
- 5 -- Kernel Logistic Regression
- 6 -- Support Vector Regression
- 7 -- Blending and Bagging
- 8 -- Adaptive Boosting
- 9 -- Decision Tree
- 10 -- Random Forest
- 11 -- Gradient Boosted Decision Tree
- 12 -- Neural Network
- 13 -- Deep Learning
- 14 -- Radial Basis Function Network
- 15 -- Matrix Factorization
- 16(完结) -- Finale