[TOC]
## **1. k近邻算法的基本概念,原理以及应用**
* k近邻算法是一种**基本分类和回归方法**。本篇文章只讨论分类问题的k近邻法。
* K近邻算法,即是给定一个训练数据集,对新的输入实例,在训练数据集中找到与该实例**最邻近**的K个实例,**这K个实例的多数属于某个类**,就把该输入实例分类到这个类中。(**这就类似于现实生活中少数服从多数的思想**)根据这个说法,咱们来看下引自维基百科上的一幅图:
* :-: 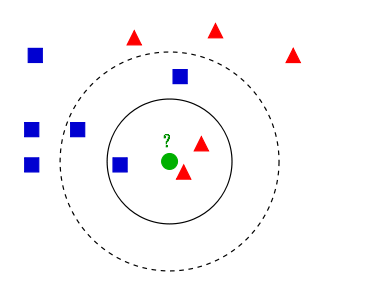
* 如上图所示,有**两类**不同的样本数据,分别用蓝色的小正方形和红色的小三角形表示,而图正中间的那个绿色的圆所标示的数据则是**待分类的数据**。这也就是我们的目的,来了一个新的数据点,我要得到它的类别是什么?好的,下面我们根据k近邻的思想来给绿色圆点进行分类。
* 如果K=3,绿色圆点的最邻近的3个点是2个红色小三角形和1个蓝色小正方形,**少数从属于多数,** 基于统计的方法,判定绿色的这个待分类点属于红色的三角形一类。
* 如果K=5,绿色圆点的最邻近的5个邻居是2个红色三角形和3个蓝色的正方形,**还是少数从属于多数,** 基于统计的方法,判定绿色的这个待分类点属于蓝色的正方形一类。
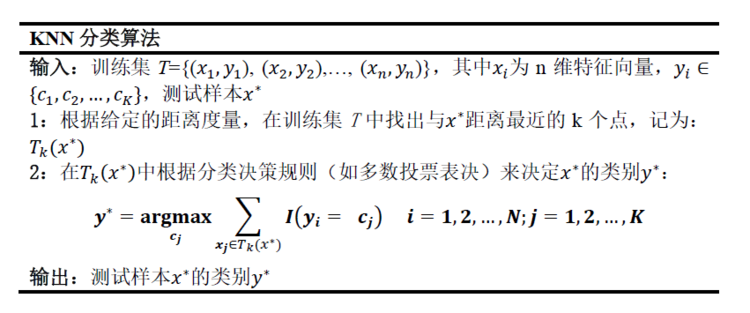
* 通过上面的例子也能够看出,KNN并不需要事先训练一个模型,而是直到需要分类测试样本时才进行。这种学习方法叫做 懒惰学习(lazy learning),这类技术在训练阶段仅仅把样本保存起来,训练时间开销为0,待收到测试样本时再处理。而且我们讲过的神经网络,决策树,logistic 回归,SVM等在训练阶段就学习模型的方法,称为急切学习(eager learning)。下面稍微形式化一点用伪代码来描述下KNN分类算法的流程:
* 
* 
* 这里加一句题外话,KNN虽然思想简单,但是性能是很不错的,**能够理论证明KNN的泛化错误率不超过贝叶斯最优分类器的错误率的两倍。** 从以上的基本原理中,我们大概能够得到KNN算法的三个关键点:
* 1. **K值的大小对预测结果的影响**
* 2. **距离度量方式**
* 3. **如何找到与测试样本距离最近的K个样本**
* 下面会分别介绍这三方面的内容。
## **2. KNN中K值大小对预测结果的影响**
* 从上面原理中,能够知道KNN中K值是需要自己指定的,关于K值大小对预测结果的影响如下:
* 若K值太小,相当于用较小的邻域中的训练样本去预测,则KNN分类器容易受到由于训练数据中噪声的影响而产生过拟合。
* 若K值太大,因为邻域比较大,则与测试样本距离较远的训练样本也会起作用,这样会导致误分类测试样本。
* 若K=N,那么无论输入的测试样本是什么,输出都会是训练样本中样本数量最多的类,这种模型基本没什么用。
* **在实际应用中,k值一般选取一个比较小的值,可以通过交叉验证法来选取最优的K值。**
## **3. KNN中距离度量方式**
* 在上文中说到,k近邻算法是在训练数据集中找到与该实例**最邻近**的K个实例,这K个实例的多数属于某个类,我们就说预测点属于哪个类。
* 定义中所说的最邻近是如何度量呢?我们怎么知道谁跟测试点最邻近。这里就会引出我们几种度量俩个点之间距离的标准。
* 我们可以有以下几种度量方式:
* 
* 其中当p=2的时候,就是我们最常见的欧式距离,我们也一般都用欧式距离来衡量我们高维空间中俩点的距离。在实际应用中,距离函数的选择应该根据数据的特性和分析的需要而定,一般选取p=2欧式距离表示。
## **4. 特征归一化的必要性**
* 首先举例如下,我用一个人身高(cm)与脚码(尺码)大小来作为特征值,类别为男性或者女性。我们现在如果有5个训练样本,分布如下:
* A \[(179,42),男\] B \[(178,43),男\] C \[(165,36)女\] D \[(177,42),男\] E \[(160,35),女\]
* 通过上述训练样本,很容易看到第一维身高特征是第二维脚码特征的4倍左右,那么在进行距离度量的时候,**我们就会偏向于第一维特征。**这样造成俩个特征并不是等价重要的,最终可能会导致距离计算错误,从而导致预测错误。举例如下:
* 现在来了一个测试样本 F(167,43),让我们来预测他是男性还是女性,我们采取k=3来预测。
* 下面我们用欧式距离分别算出F离训练样本的欧式距离,然后选取最近的3个,多数类别就是我们最终的结果,计算如下:
* 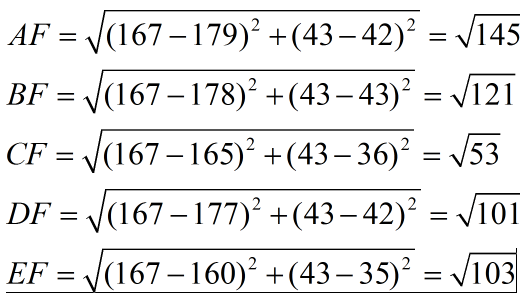
* 由计算可以得到,最近的前三个分别是C,D,E三个样本,那么由C,E为女性,D为男性,女性多于男性得到我们要预测的结果为**女性**。
* **这样问题就来了,一个女性的脚43码的可能性,远远小于男性脚43码的可能性,那么为什么算法还是会预测F为女性呢?那是因为由于各个特征量纲的不同,在这里导致了身高的重要性已经远远大于脚码了,这是不客观的。** 所以我们应该让每个特征都是同等重要的!这也是我们要归一化的原因!归一化公式如下:
* 
## **5. k近邻算法中的分类决策规则**
* k近邻算法的分类决策规则通俗来说就是**k 近邻法中的分类决策规则往往是多数表决决定,背后的数学思维是什么?**
* k 近邻法中的分类决策规则往往是多数表决,即由输入实例的 k 个近邻的训练实例中的多数类决定输入实例的类。
* 多数表决规则(majority voting rule)有如下解释:如果分类的损失函数为 0-1 损失函数,分类函数为:
* :-: 
* 那么误分类的概率是:
* :-: 
* 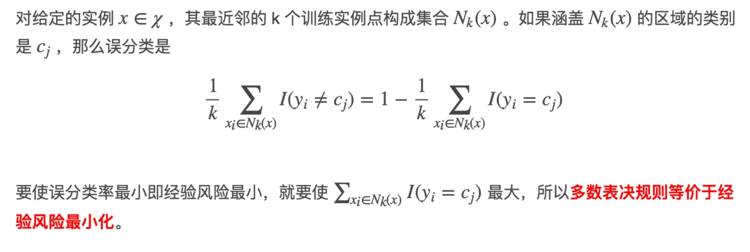
* 换句话说,目前候选种类为c1,c2....cj,我选择哪一个,使得我们的经验风险最小(**经验风险通俗讲就是训练数据的错误值**)。
* 那么由上式经验风险最小,**也就是说,要我们预测出的种类属于cj类的最多(那么预测出来的种类结果和真实结果一致的越多,我们认为正确可能性就越大,也就是经验风险越小),也就是我们所说的多数表决规则。而它也等价于我们的经验风险最小。这也是我们在k近邻算法中采用多数表决规则的正确性说明!**
## **6. k近邻法的实现:kd树原理的讲解以及kd树详细例子**
### **kd树原理**
**kd 树的结构**
* kd树是一个二叉树结构,它的每一个节点记载了【**特征坐标,切分轴,指向左枝的指针,指向右枝的指针**】。
* 其中,特征坐标是线性空间 Rn 中的一个点 (x1,x2,…,xn)切分轴由一个整数 r 表示,这里 1≤r≤n,是我们在 n 维空间中沿第 rr维进行一次分割。节点的左枝和右枝分别都是 kd 树,并且满足:如果 y 是左枝的一个特征坐标,那么 yr≤xr(**左分支结点**);并且如果 z 是右枝的一个特征坐标,那么 zr≥xr(**右分支结点**)。
* 给定一个数据样本集 S⊆Rn 和切分轴 r,以下**递归算法**将构建一个基于该数据集的 kd 树,每一次循环制作一个节点:
> −− 如果 |S|=1,记录 S 中唯一的一个点为当前节点的特征数据,并且不设左枝和右枝。(|S| 指集合 S 中元素的数量)
> −− 如果 |S|>1
> * 将 S 内所有点按照第 r 个坐标的大小进行**排序**;
> * 选出该排列后的中位元素(**如果一共有偶数个元素,则选择中位左边或右边的元素,左随便哪一个都无所谓**),作为当前节点的特征坐标,并且记录切分轴 r;
>
> * 将 SL设为在 S 中所有排列在中位元素之前的元素; SR 设为在 S 中所有排列在中位元素后的元素;
>
> * 当前节点的左枝设为以 SL 为数据集并且 r 为切分轴制作出的 kd 树;当前节点的右枝设为以 SR 为数据集并且 r为切分轴制作出的 kd 树。再设 r←(r+1)modn。(**这里,我们想轮流沿着每一个维度进行分割;modn 是因为一共有 n 个维度,**在**沿着最后一个维度进行分割之后再重新回到第一个维度。**)
>
### **kd树的构建**
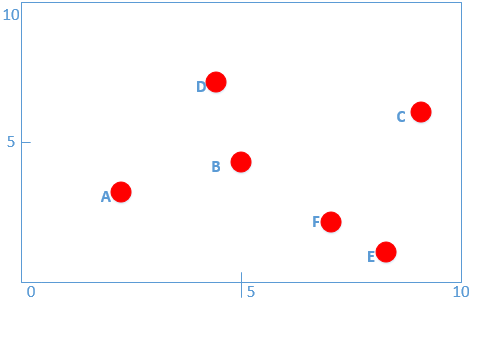
* **给定一个二维空间的数据集:**
* **T = {(2,3),(5,4),(9,6),(4,7),(8,1),(7,2)}, 构造一个平衡kd树。**
* **为了方便,我这里进行编号A(2,3)、B(5,4)、C(9,6)、D(4,7)、E(8,1)、F(7,2)**
* **初始值r=0,对应x轴。**
* 可视化数据点如下:
* :-: 
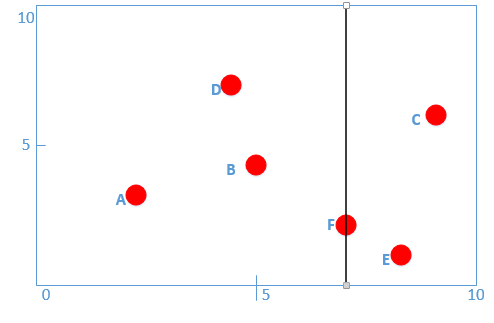
* 首先先沿 x 坐标进行切分,我们选出 x 坐标的中位点,获取最根部节点的坐标,对数据点x坐标进行排序得:
* A(2,3)、D(4,7)、B(5,4)、F(7,2)、E(8,1)、C(9,6)
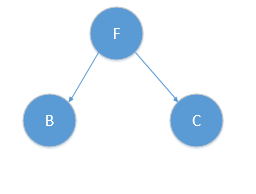
* **则我们得到中位点为B或者F,我这里选择F作为我们的根结点,并作出切分(并得到左右子树),如图:**
* :-: 
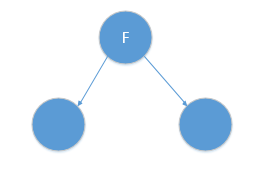
* **对应的树结构如下:**
* :-: 
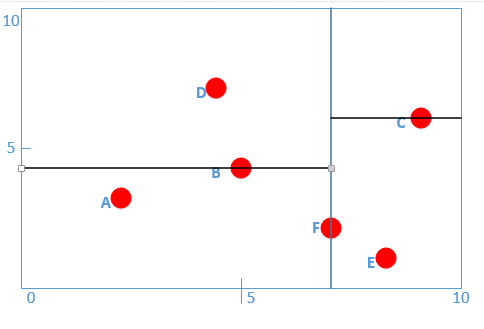
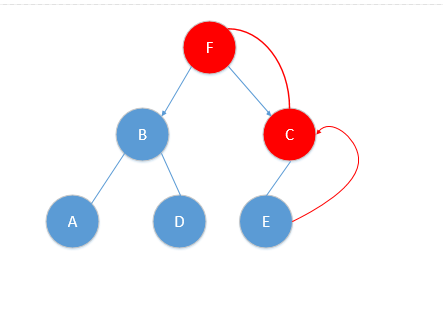
* **根据算法,此时r=r+1=1,对应y轴,此时对应算法|S|>1,则我们分别递归的在F对应的左子树与右子树按y轴进行分类,得到中位节点分别为B,C点,如图所示:**
* :-: 
* **对应树结构为:**
* :-: 
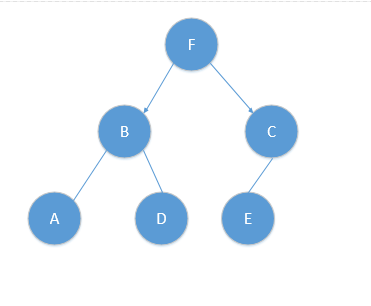
* **而到此时,B的左孩子为A,右孩子为D,C的左孩子为E,均满足|S|==1,此时r = (r+1)mod2 = 0,又满足x轴排序,对x轴划分!则如图所示:**
* :-: 
* 对应树结构如下:
* :-: 
* 到这里为止,给定的kd树构造完成啦,**所有的数据点都能在树上的每个结点找到!**而我们根据上面构造树的过程,也能很容易的知道,来了一个新的数据点的时候,对应该层的指定维数,通过比较大小,我就能知道往左(**预测点对应维度数据小于该结点对对应维度数据**)走还是往右(**预测点对应维度数据大于该结点对应维度数据**)走,**那么好的情况下**,就能省掉一半的数据点啦~(**不好的情况,没有节省,后面会说到,这也是kd树的致命缺点~**)
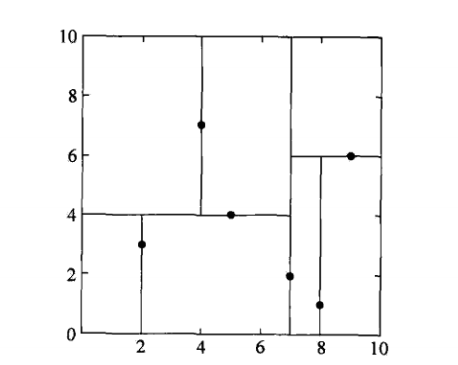
* 这也是李航博士书籍上例子中kd树构造的详细过程!他的图片如下:
* :-: 
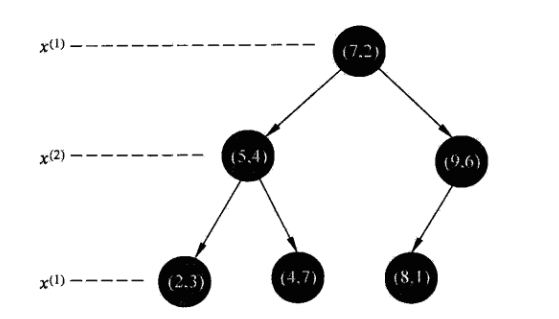
* 对应kd树为:
* :-: 
### **kd树搜索**
* 我这里和统计学习方法例子一样,以最近邻为例加以叙述,同样的方法可以应用到k近邻。
* **为了让大家更好的理解,我这里直接用上面例子给大家一步一步给出过程!**
* **首先我们来看用kd树的最近邻搜索算法流程:**
* **输入:已构造的kd树;目标点x;**
* **输出:x的最近邻.**
* (1)在kd树中找出包含目标点x的叶结点:从根结点出发,递归地向下访问kd树,**若目标点x当前维的坐标小于切分点的坐标,则移动到左子节点,否则移动到右子结点.直到子结点为叶结点位置.**
* (2)以此叶结点为“当前最近点”
* (3)递归地向上回退,在每个结点进行以下操作:
* * (a)如果该结点保存的实例点比当前最近点距离目标点更近,则以该实例点为“当前最近点”.
* * (b)当前最近点一定存在于该结点一个子结点对应的区域.检查该子结点的父结点的另一个子结点对应的区域是否有更近的点.具体地,**检查另一子结点对应的区域是否以目标点为球心、以目标点与“当前最近点”间为半径的超球体相交。**
* **如果不相交,向上回退.**
* (4)**当回退到根结点时,搜索结束。最后的“当前最近点”即为最近邻点.**
* 下面通过例子,一步一步走一遍上面所描述的算法过程,化抽象为具体!
* **kd树最近邻搜索例题:**
* **给定一个二维空间的数据集:**
* **T = {(2,3),(5,4),(9,6),(4,7),(8,1),(7,2)},输入目标实例为K(8.5,1),求K的最近邻。**
* **首先我们由上面可以给出,T的kd树对应如下:**
* :-: 
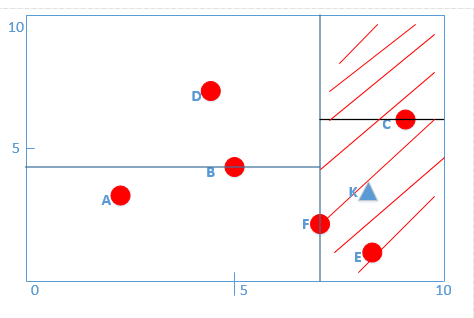
* 我们此时的K(8.5,1),根据算法第一步得:第一层的x轴K点为8大于F点的7,所以进入F(7,2)的右子树,进入下面红色线条区域:
* :-: 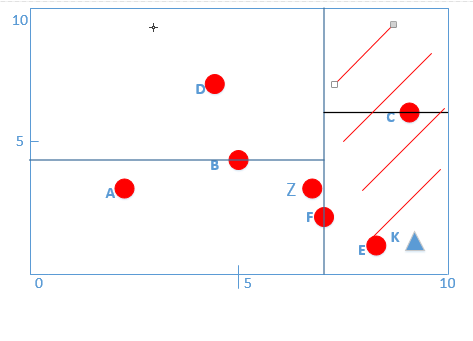
* 到了第二层,分割平面坐标为y轴,K点y轴坐标为1,小于C点y轴坐标6,则继续向右走,在下图红色线条区域内:
* :-: 
* 则此时算法对应第(1)部分完成,我们找到了叶子节点E(8,1)。
* 我们进行算法第(2)步,把E(8,1)作为最近邻点。此时我们算一下KE之间的距离为0.5(便于后面步骤用到).
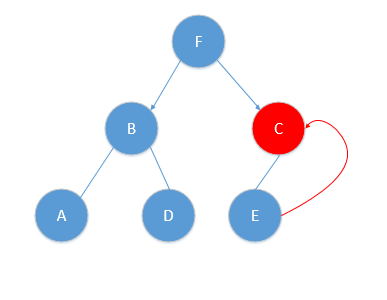
* 然后进行算法第(3)步,递归的往上回退,每个结点进行相同步骤,好,我现在从E点回退到C点,对应图片如下;
*
* :-: 
*
* 此时对C点进行第(3)步的(a)操作,判断一下KC距离与保存的最近邻距离(这时是KE)比较,KC距离为点K(8.5,1)与点C(9,6)之间的距离![[公式]](https://www.zhihu.com/equation?tex=%5Csqrt%7B25.25%7D+)\>最近邻0.5,于是不更新最近邻点。
*
* 然后对C点进行第(3)步的(b)操作,判断一下当前最近邻的距离画一个圆是否与C点切割面相交,如图所示:
*
* :-: 
*
* 我们很容易看到与C点切割面并没有相交,于是执行由C点回退到它的父结点F点。如图:
*
* :-: 
*
* 对F点进行(a),(b)操作!
* 进行(a)步骤,判断FK的距离是否小于当前保存的最小值,FK=![[公式]](https://www.zhihu.com/equation?tex=%5Csqrt%7B%287-8.5%29%5E%7B2%7D%2B%282-1%29%5E%7B2%7D+%7D%3D%5Csqrt%7B1.25%7D++)\>0.5,所以不改变最小距离
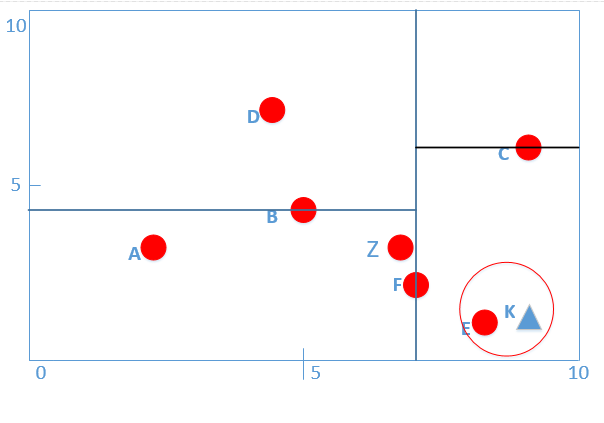
* 下面我们进行(b)步骤,为了判断F点的另一半区域是否有更小的点,判断一下当前最近邻的距离画一个圆是否与F点切割面相交,如图所示:
* :-: 
* **发现与任何分割线都没有交点,那么执行算法最后一步,此时F点已经是根结点,无法进行回退,那么我们可以得到我们保留的当前最短距离点E点就是我们要找的最近邻点!任务完成,**
* **并且根据算法流程,我们并没有遍历所有数据点,而是F点的左孩子根本没有遍历,节省了时间,但是并不是所有的kd树都能到达这样的效果。**
## **7. kd树的不足以及最差情况举例**
* 讲解这个知识点,还是通过一个例子来直观说明!
* **给定一个二维空间的数据集:**
* **T = {(2,3),(5,4),(9,6),(4,7),(8,1),(7,2)},输入目标实例为K(8,3),求K的最近邻。**
* **首先我们由上面可以给出,T的kd树对应如下:**
*
* :-: 
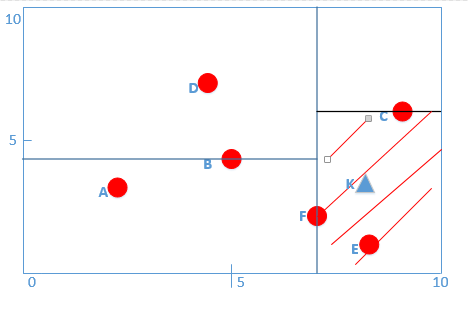
* **我们此时的K(8,3),根据算法第一步得:第一层的x轴K点为8大于F点的7,所以进入F(7,2)的右子树,进入下面红色线条区域:**
*
* :-: 
*
* **(注意:这里叶子节点画不画分割线都没有关系!)**
*
* **到了第二层,分割平面坐标为y轴,K点y轴坐标为3,小于C点y轴坐标6,则继续向右走,在下图红色线条区域内:**
*
* :-: 
*
* **则此时算法对应第(1)部分完成,我们找到了叶子节点E(8,1)。**
*
* **我们进行算法第(2)步,把E(8,1)作为最近邻点。此时我们算一下KE之间的距离为2(便于后面步骤用到).**
*
* **然后进行算法第(3)步,递归的往上回退,每个结点进行相同步骤,好,我现在从E点回退到C点,对应图片如下;**
*
* :-: 
*
* **此时对C点进行第(3)步的(a)操作**,判断一下KC距离与保存的最近邻距离(这时是KE)比较,KC距离为点K(8,3)与点C(9,6)之间的距离![[公式]](https://www.zhihu.com/equation?tex=%5Csqrt%7B10%7D+)\>最近邻2,于是不更新最近邻点。
*
* **然后对C点进行第(3)步的(b)操作,判断一下当前最近邻的距离画一个圆是否与C点切割面相交,如图所示:**
*
* :-: 
*
* **我们很容易看到与C点切割面并没有相交,于是执行由C点回退到它的父结点F点。如图:**
*
* :-: 
*
* **对F点进行(a),(b)操作!**
*
* **进行(a)步骤,判断FK的距离是否小于当前保存的最小值,FK=![[公式]](https://www.zhihu.com/equation?tex=%5Csqrt%7B%287-8%29%5E%7B2%7D%2B%282-3%29%5E%7B2%7D+%7D%3D%5Csqrt%7B2%7D++)**
*
* **<2,所以将最小距离替换为FK的距离!**
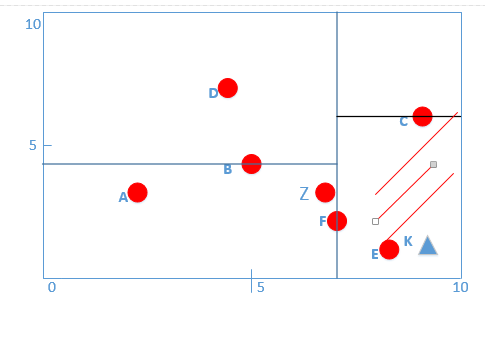
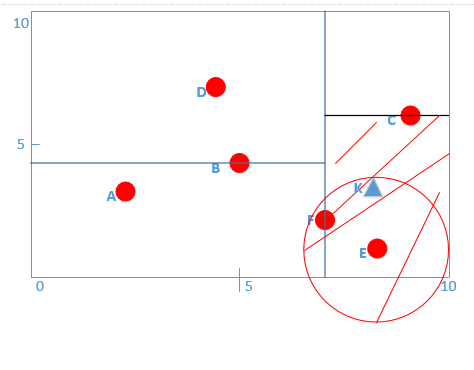
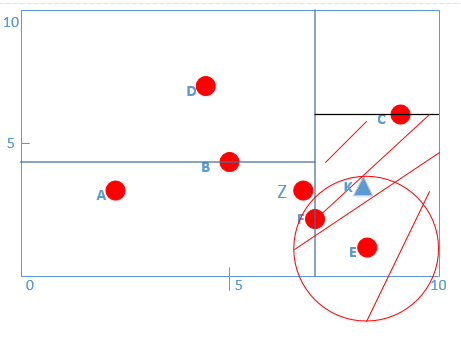
* **下面我们进行(b)步骤,为了判断F点的另一半区域是否有更小的点,** 判断一下当前最近邻的距离画一个圆是否与F点切割面相交,如图所示:
*
* :-: 
*
* 我们可以看出,此时圆与F点有交点,那么说明F点左侧是有可能存在与K点距离更小的点(注:这里我们人为看起来好像没有,但是计算机不知道,必须搜索下去,只要以当前最小值画圆发现与节点切割面有交点,**那么一定要进行搜索,不然数据如果是下图:)**
*
* :-: 
*
* 如果不进行搜索,我们就可能会漏掉Z数据点,因为KZ比当前最小值KF小!
*
* 此时相交,我们就需要再F点的左孩子进行搜索,一直搜索到叶子节点A,然后进行(a),(b)步骤,继续回溯到它的父亲结点B,以及最后到达F点,完成最后的最近邻是F点,这里几乎遍历了所有数据点,**几乎退化了为线性时间0(n)了。这也是kd树的最差的情况。**
*
*
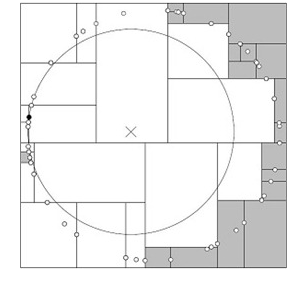
* 当给定的数据分布很差的时候,我们每一次计算画圆过程中,**都会与每一个分割面相交的时候,都会递归搜索到该结点的另一个子空间中遍历,那么这样最坏的情况是进行线性时间搜索!**比如构建的kd树和数据分布如下:
*
* :-: 
*
* **如图所示,我们可以看到几乎所有的数据离给定预测的点距离很远,每次进行算法第三步判断是否与分割面有交点的时候,几乎每个面都有交点,只要有交点,就必须将该点的另一半结点遍历到叶子结点,重复的进行算法步骤,导致了搜索的低效!**
## **8. k近邻方法的一些优缺点总结**
* **优点:**
*
* 1. KNN分类方法是一种非参数的分类技术,简单直观,易于实现!**只要让预测点分别和训练数据求距离,挑选前k个即可,非常简单直观。**
*
* 2. KNN是一种在线技术,新数据可以直接加入数据集而**不必进行重新训练**
*
* **缺点及改进**:
* 1. 当样本不平衡时,**比如一个类的样本容量很大,其他类的样本容量很小**,输入一个样本的时候,K个邻近值大多数都是大样本容量的那个类,这时可能会导致分类错误。
* **改进方法:对K邻近点进行加权,也就是距离近的权值大,距离远的点权值小。**
*
2. 计算量较大,每个待分类的样本都要计算它到全部点的距离**,根据距离排序才能求得K个临近点。
* **改进方法:先对已知样本带你进行裁剪,事先去除分类作用不大的样本,采取kd树以及其它高级搜索方法BBF等算法减少搜索时间。**
