
## 说明
本节课讲述如何通过IOA连接至**虚拟**的西门子S7-1200系列控制器;
>使用的PLC编程软件为西门子博图软件,版本为TIA Portal V15;
>虚拟工厂软件为IOA,版本为V5.0以上;
>虚拟S7-1200与实体控制器的仿真区别如下表所述:
| 控制模块 | 实体S7-1200 | 虚拟S7-1200 |
| --- | --- |--- |
| 方式 | 实体接入 | PLCSIM接入 |
| 编程 | 博图V15 | 博图V15 |
| IO | 32个IO | 32个IO |
| 步进/伺服 |有 | 无|
除以上表格所述,实体S7-1200与虚拟仿真与控制方法完全一致;
>IOA与虚拟S7-1214仿真教程视频[(点击跳转播放)](https://www.bilibili.com/video/BV1zZ4y1B7Ys/)
*******************
## IOA与虚拟S7-1200系列控制使用步骤:
### 第一步:安装和下载对应软件包

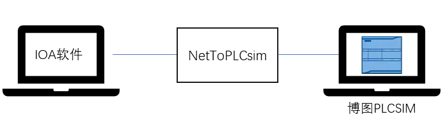
IOA通过PLCSIM及NeToPLC进行仿真PLC的链接,所以首先确定电脑安装以上软件;
> [博图V15软件下载安装;](https://pan.baidu.com/s/1SliuSbTn93IjtnJg2s-tIg)提取码:1234
> [博图V16软件下载安装;](https://pan.baidu.com/s/1o7YlEaLpENAremxhs0pUuA?pwd=1234)提取码:1234
> 备注:包含NetToPLCsim 软件已在博图安装包;
| 控制器型号 | 工程下载 |
| --- | --- |--- |
| S7-1212C | [博图V15工程](//down.ioaol.cn/004C463D1B91000A) |
| S7-1212C | [博图V16工程](//down.ioaol.cn/004C463D1B91000A) |
### 第二步:启动虚拟S7-1200
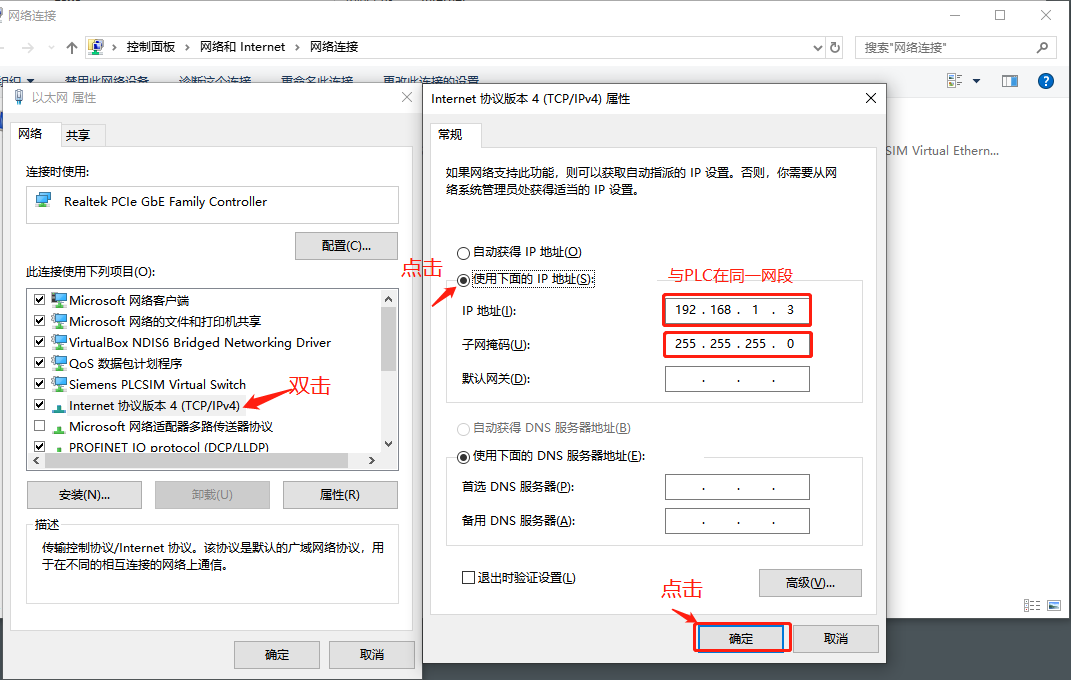
1、首先从电脑控制面板中进入到网络和Internet,并进入到网络和共享中心,选择左侧的更改适配器,找到以太网并右击进入属性设置,然后先启动Nettoplcsim软件。
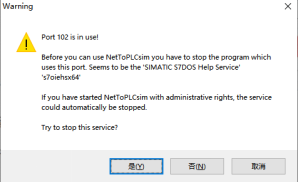
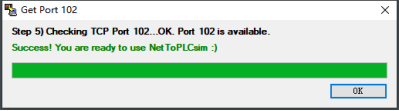
2、开启“NetToPLCsim.exe ”:依次打开S7-1200控制工程文件夹->S7-1200仿真PLC程序文件夹- >Nettoplcsim 文件夹。以管理员身份运行“NetToPLCsim.exe"。在弹出的窗口中依次点击“是”、“OK”按钮。
**注:一定要在启动 PLCSIM 软件之前启动 Nettoplcsim 软件!!!**
再启动 PLC SIM,下载程序
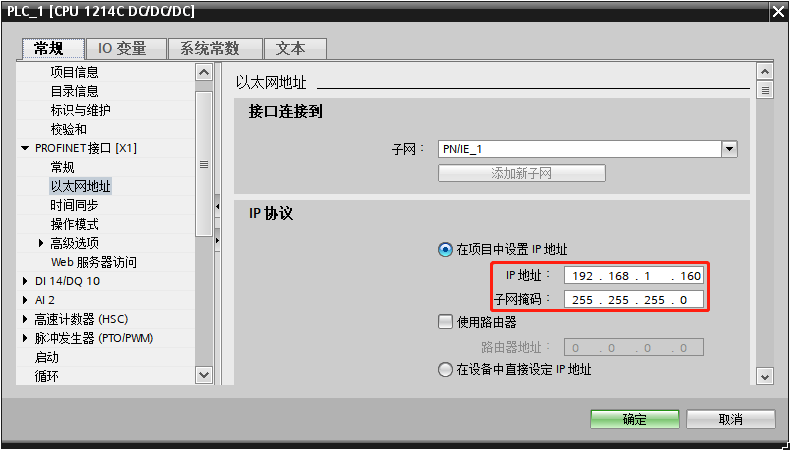
3、在博途中打开S7-1200 PLC模板程序,在PLC属性设置中设置PLC 的IP地址为192.168.1.160
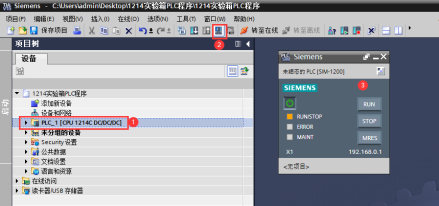
下载“S7-1200 仿真 PLC 程序”,在设备列表中选择“PLC_1”,并点击“开始”仿 真按钮,启动仿真 PLC。
将编写好的 PLC 程序控制工程下载到仿真 PLC 中,操作步骤与实体 PLC 一致。在弹出的“扩展的下载到设备”对话框中,“PG/PC接口的类型”选择“PNIE”、“PG/PC接口”选择“PLC SIM ”、“接口/子网的连接”选择PLC实际的接口,单击“开始搜索”按钮。
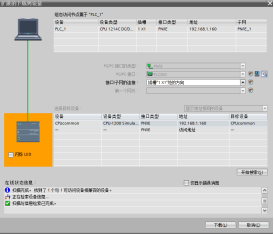
工程下载完成后需点击“启动 PLC”按钮
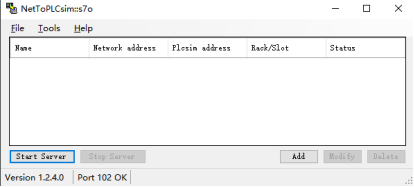
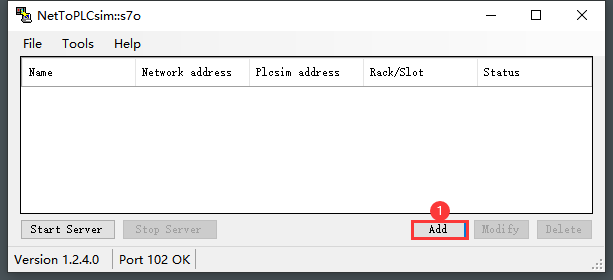
4、设置 NetToPLCsim 软件参数
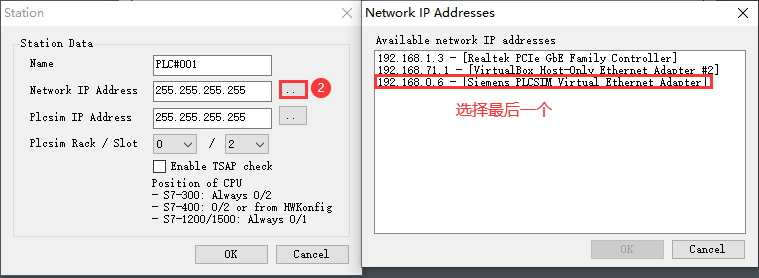
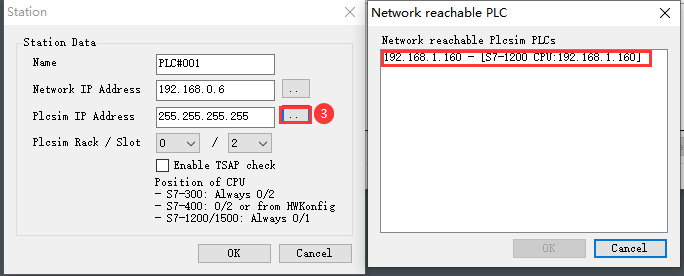
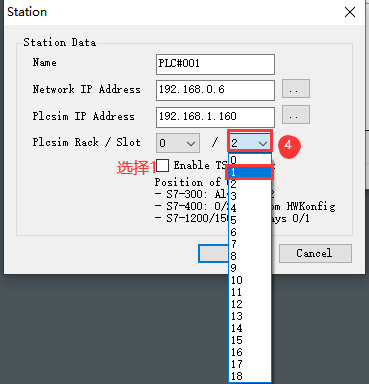
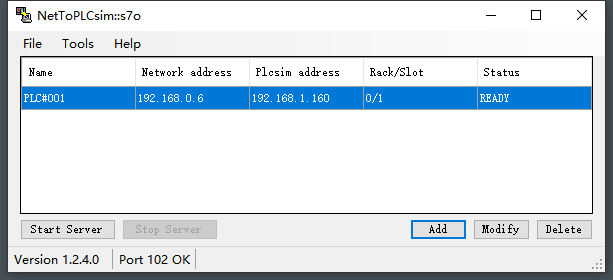
* 打开 NetToPLCsim 软件窗口,点击”Add”按钮,在弹出的“Station”窗口中,分别点击两个 IP 地址输入框后的选择按钮,在弹出窗口中选择 IP,并点击“OK”按钮。
* 在 Plcsim Rack/Slot 中按图选择 1 号插槽。
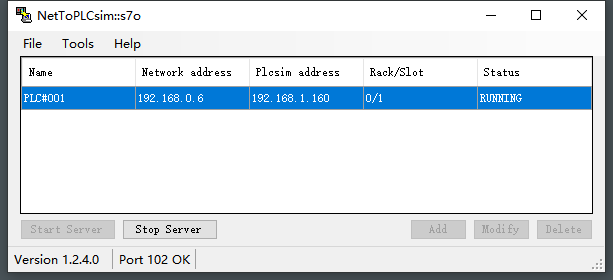
* 点击“Start Server”按钮,当 Status 显示“”RUNNING”,表示 NetToPLCsim 设置成功。
*****
### 第二步,通过IOA链接NetToPLCsim
打开IOA软件,点击左上角系统栏里的控制器选项;

从面板中选择添加控制器,添加控制器为S7-1214-S1
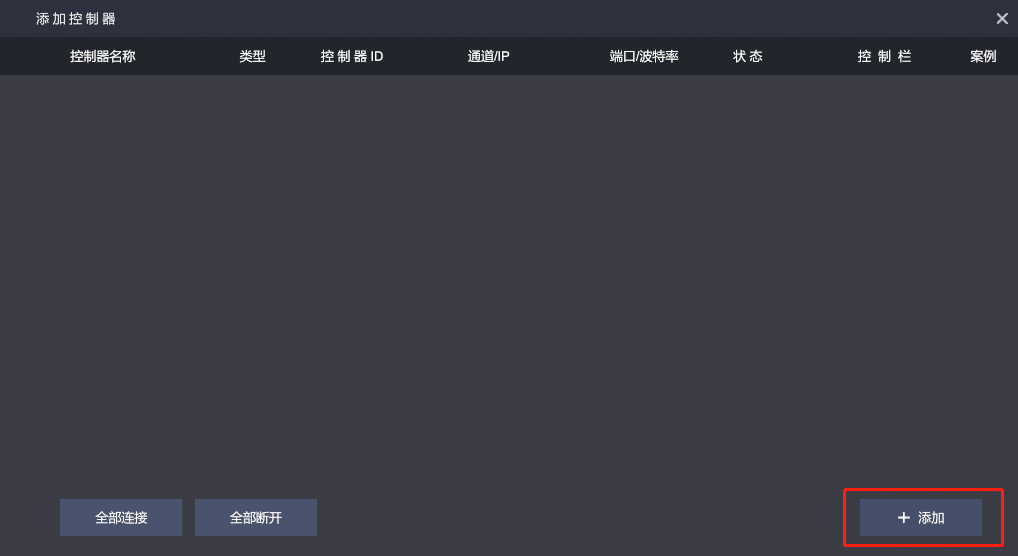
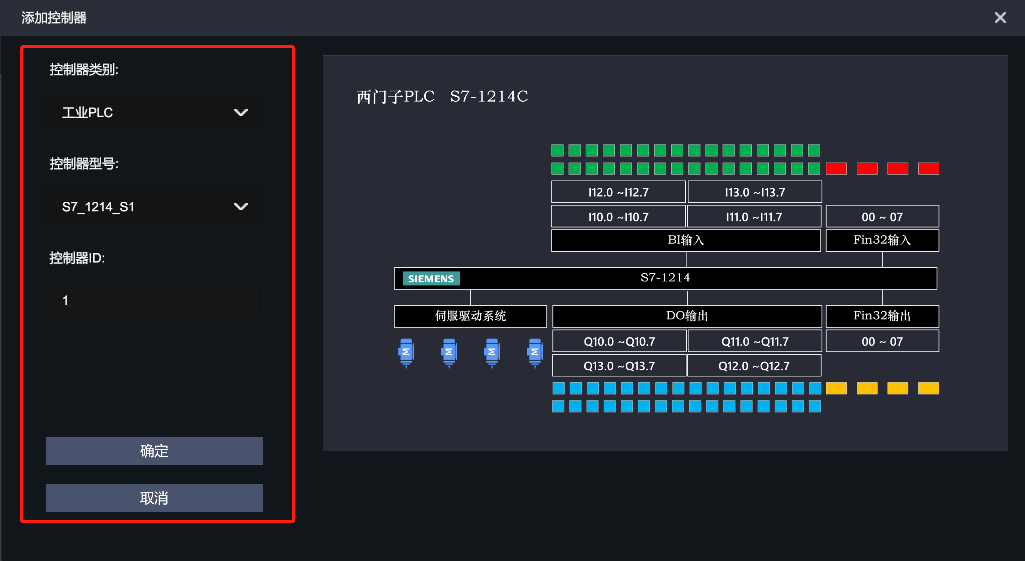
最后点击确定按钮,完成控制器添加。
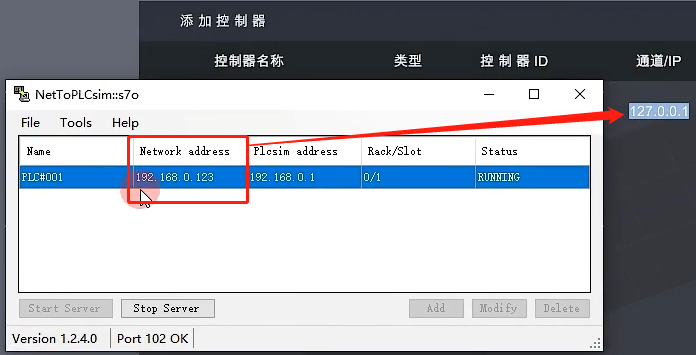
从添加的控制器中,输入通道/IP,**输入NetToPLCsim的192.168.0.123**,端口/波特率,点击连接
输入后,点击链接,连接成功。
*****
*****
- IOA-更新与安装
- 软件注册与安装
- 软件使用协议
- 注册与使用
- (一)、认识IOA基础界面功能
- UI界面与设置
- 软件环境设置
- 三维导航操作
- 3D导航球使用
- 快捷键与仿真
- IOA开发工具下载汇总
- (二)、三维场景搭建
- 坐标及旋转
- 模型树与拼接
- 从SolidWorks到IOA放置的模型自制
- IOA辅助工具
- (三)、虚拟电气与调试
- (三)、虚实控制与编程
- 西门子PLC的仿真与控制
- 实体S7-1200控制器的添加
- 虚拟S7-1200控制器的添加
- 西门子PLCS7-1512控制器的添加
- 三菱PLC的仿真与控制
- 三菱PLC仿真器的使用说明
- 三菱PLC的添加与说明
- 工业机器人(纳博特)仿真
- 工业机器人(KEBA)仿真
- 工业机器人(埃夫特)仿真
- 协作机器人(遨博)仿真
- 运动控制(ZMC308)正运动仿真
- 机器视觉(VPLC516)正运动仿真
- 微型机器人(开塔)仿真
- 开塔机器人使用教程
- IOA与开塔机器人仿真
- 工业机器人(ABB)仿真
- Py-teach快速编程仿真
- Py-teach与IOA仿真
- Py-teach语法与编程
- Python编程与仿真
- Python与IOA仿真方法
- Python编程API说明
- 树莓派与IOA仿真
- EAIDK610与IOA仿真
- 单片机接入与仿真控制
- Mixly与IOA
- ArduinoIDE
- Mixly-MEGA_S虚拟工厂SDK
- Mixly-UNO_S虚拟工厂SDK
- Mixly-ESP32虚拟工厂SDK
- (四)、自定义控制器添加
- modbus-tcp自定义控制器