
# 说明
本节课主要讲述如何使如何通过 IOA连接虚拟VPLC516E_4控制器;
>使用的控制器为VPLC516E_4控制器;
>虚拟工厂软件为IOA,版本为V5.0以上;
## **1、软件及使用手册下载**
ZDevelop是Zmoiton系列运动控制器的PC端程序开发调试软件,通过它用户能够很容易的对控制器进行配置,快速开发应用程序以及对运动控制器正在运行的程序进行实时调试。VPLC516E是专门针对视觉方向所增加的一种控制器。
>ZDevelop-VPLC516E软件:[点击下载](https://pan.baidu.com/s/1VaNiHWlvxxk_oqYmNmwxNQ) 提取码:1234
>VPLC516E_4使用手册:[点击查看](http://www.zmotion.com.cn/upload/%E6%AD%A3%E8%BF%90%E5%8A%A8%E6%8A%80%E6%9C%AF-%E3%80%8AVPLC516E%E6%8E%A7%E5%88%B6%E5%99%A8%E7%A1%AC%E4%BB%B6%E6%89%8B%E5%86%8C%E3%80%8B.pdf)
VPLC516E_4虚拟控制器连接IOA教程
> IOA连接VPLC516E_4视频教程:[点击播放](https://www.bilibili.com/video/BV1GF411W7bc?spm_id_from=333.999.0.0)
*****
</div><div><br></div><div><br>
## **2、软件模拟仿真**
> **IOA连接正运动视觉虚拟控制器教程:**[视频](https://www.bilibili.com/video/BV1B54y1G7Fd/)
### **IOA添加VPLC516E控制器**
打开IOA虚拟工厂,点击系统菜单栏中的“**控制器**”,在弹出的“**添加控制器**”界面点击“**+添加**”按钮。
控制器类别选择“**运动控制器**”,控制器型号为“**VPLC516E_4_V1**”,点击“**确定**”。

***
### **程序下载**
打开zdevelop快捷方式,点击菜单栏“**文件**”中的“**打开项目**”;选择需要打开的项目文件(以.zpj结尾)。项目中的Basic文件中对轴的类型、速度等进行了设置,对正运动控制器与IOA之间DI,DO以及模拟量的modbus通讯地址对应。
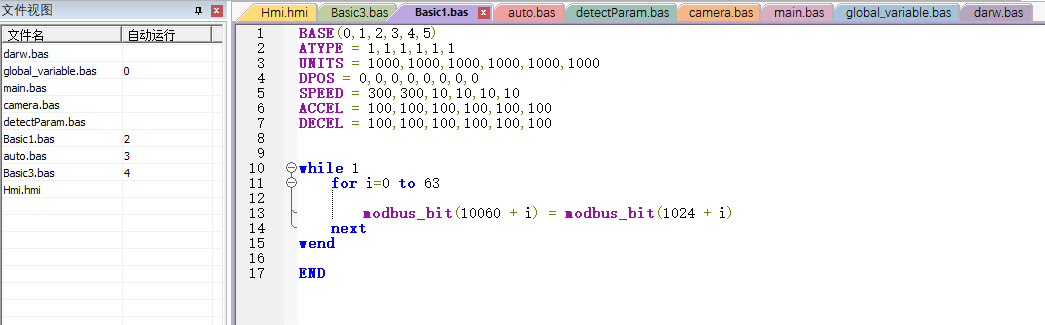
针对于视觉控制器,主要包括了以下必要文件

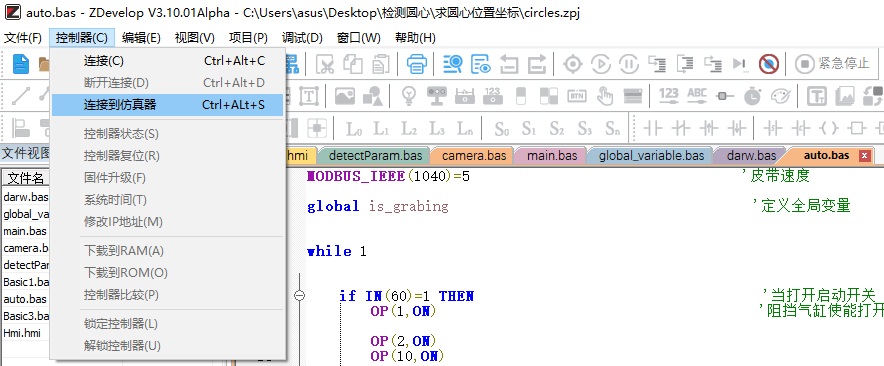
控制程序编写无误后,点击菜单栏“**控制器**”中的“**连接到仿真器**”。
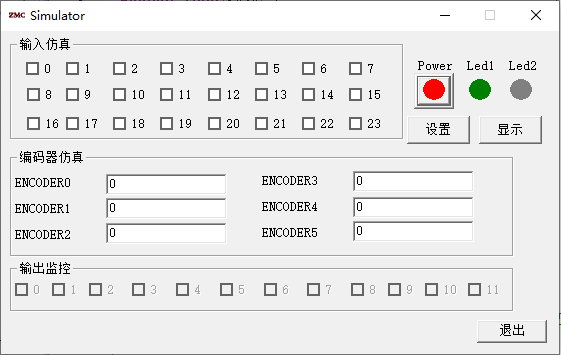
上述步骤执行完后系统会自动创建并弹出仿真器窗口,如下图所示。
点击ZDevelop菜单栏“**下载到 RAM**”图标将程序下载至仿真器。
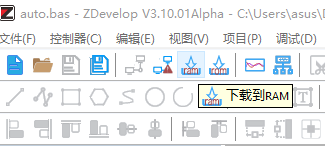
下方窗口显示“Down to Controller Rom Success”表示程序下载成功,如下图所示。

***
### **程序运行**
在IOA虚拟工厂中点击左上角菜单栏中的“**控制器**”,确认VPLC516E_4_V1的IP地址为12.7.0.0.1,端口号为502,点击“**连接**”,完成IOA与正运动仿真器的连接。
然后点击菜单栏“**开始**”按钮。打开切换开关,完成了VPLC516E虚拟控制器对IOA场景的控制。
***
</div><div><br></div><div><br>
- IOA-更新与安装
- 软件注册与安装
- 软件使用协议
- 注册与使用
- (一)、认识IOA基础界面功能
- UI界面与设置
- 软件环境设置
- 三维导航操作
- 3D导航球使用
- 快捷键与仿真
- IOA开发工具下载汇总
- (二)、三维场景搭建
- 坐标及旋转
- 模型树与拼接
- 从SolidWorks到IOA放置的模型自制
- IOA辅助工具
- (三)、虚拟电气与调试
- (三)、虚实控制与编程
- 西门子PLC的仿真与控制
- 实体S7-1200控制器的添加
- 虚拟S7-1200控制器的添加
- 西门子PLCS7-1512控制器的添加
- 三菱PLC的仿真与控制
- 三菱PLC仿真器的使用说明
- 三菱PLC的添加与说明
- 工业机器人(纳博特)仿真
- 工业机器人(KEBA)仿真
- 工业机器人(埃夫特)仿真
- 协作机器人(遨博)仿真
- 运动控制(ZMC308)正运动仿真
- 机器视觉(VPLC516)正运动仿真
- 微型机器人(开塔)仿真
- 开塔机器人使用教程
- IOA与开塔机器人仿真
- 工业机器人(ABB)仿真
- Py-teach快速编程仿真
- Py-teach与IOA仿真
- Py-teach语法与编程
- Python编程与仿真
- Python与IOA仿真方法
- Python编程API说明
- 树莓派与IOA仿真
- EAIDK610与IOA仿真
- 单片机接入与仿真控制
- Mixly与IOA
- ArduinoIDE
- Mixly-MEGA_S虚拟工厂SDK
- Mixly-UNO_S虚拟工厂SDK
- Mixly-ESP32虚拟工厂SDK
- (四)、自定义控制器添加
- modbus-tcp自定义控制器