
# 说明
本节课主要讲述如何使如何通过IOA连接虚拟纳博特控制器;
>* 使用的控制器为纳博特虚拟控制器;
>* 虚拟工厂软件为IOA,版本为V5.0以上;
## **1、纳博特示教软件下载**
>* IOA连接NRC_R6 [(工程包)](//down.ioaol.cn/004C4666AD180013)
>* 纳博特虚拟控制器 [(点击下载)](https://pan.baidu.com/s/18jP98IrBdKer3T8qZD1zfA?pwd=1234)
>* 纳博特示教器使用手册 [(点击下载)](https://forinexbotweb.oss-cn-shanghai.aliyuncs.com/manual/20.10/%E7%B3%BB%E7%BB%9F%E6%93%8D%E4%BD%9C%E6%89%8B%E5%86%8CV20.10.pdf)
IOA连接虚拟纳博特控制器教程:
>* IOA连接NRC_R6教程视频[(点击跳转播放)](https://www.bilibili.com/video/BV1pi4y1k7mW?share_source=copy_web)
******
## **2、IOA与纳博特软件模拟仿真**
IOA虚拟工厂与虚拟纳博特机器人连接步骤说明如下:
### (1)添加纳博特机器人虚拟控制器
在IOA虚拟工厂菜单栏中点击控制器添加一台合适的六轴机器人模型并添加控制器。


### (2)添加六轴机器人模型,并给机器人伺服配线
在IOA虚拟工厂里添加一台合适的六轴机器人模型,并且将NRC_R6_V1的R6伺服配置给机器人的R6。


### (3)打开纳博特机器人虚拟示教器软件,并与IOA进行连接
1、打开软件,点击注册·


2、点击启动nrc2

3、打开纳博特虚拟示教器软件Qt-tp

4、在操作员初将当前用户改为管理员,密码123456。

在设置-系统设置-ip设置里查看ip地址,在IOA控制器里进行连接,IP地址为197.168.1.13,端口7000。

******
## **3、纳博特机器人D-H工程包**
1、ZY605机器人工程包[点击下载](//down.ioaol.cn/004DED3638930019)
2、ZY403机器人工程包[点击下载](//down.ioaol.cn/004DED3656EF001A)
3、JZJ06A-090机器人工程包[点击下载](//down.ioaol.cn/004DED356BB50014)
4、JZJ10A-160机器人工程包[点击下载](//down.ioaol.cn/004DED35A00C0015)
5、JZJ15B-140器人工程包[点击下载](//down.ioaol.cn/004DED35D5D50016)
6、JZJ100A-270器人工程包[点击下载](//down.ioaol.cn/004DED35F9280017)
7、JZJ100B-230机器人工程包[点击下载](//down.ioaol.cn/004DED3619010018)
**导入机器人配置**
1、点击系统设置

2、点击导入控制器配置,导入IOA场景中相应机器人所需要的配置·包·

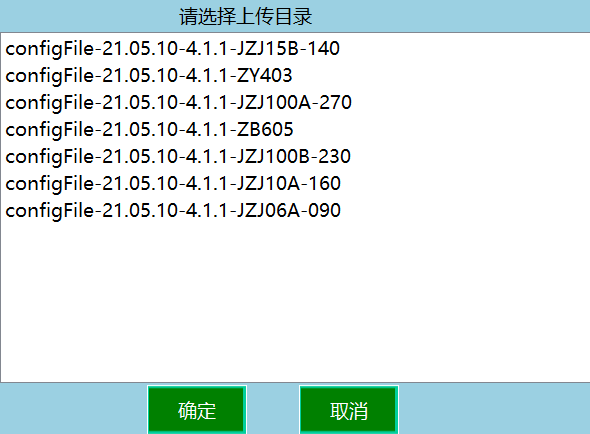
3、再将所用到的程序放入该目录下

4、等待nrc2重启,重启完成后关闭重新打开
5、等待示教器重启完成,重启完成后打开工程运行程序

## **4、纳博特示教器软件更改机器人型号配置**
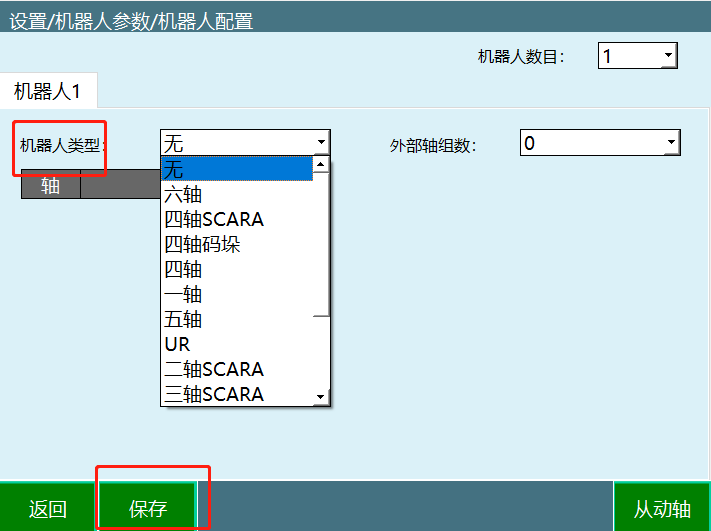
### (1)更改纳博特机器人型号
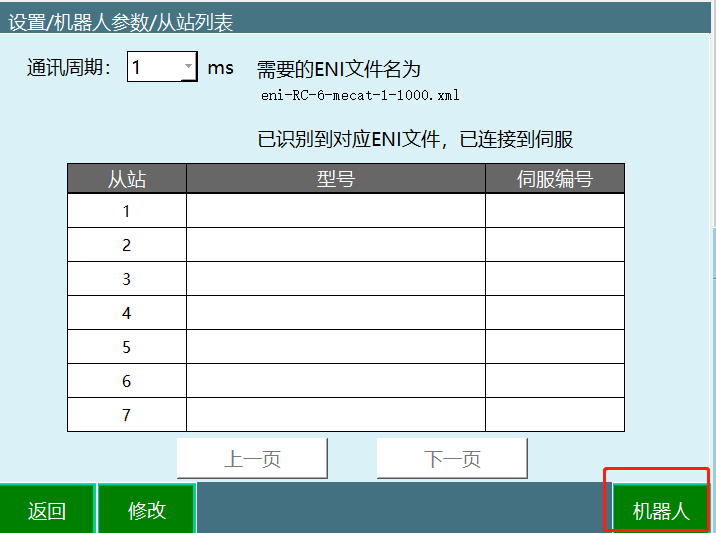
在纳博特示教器界面点击设置-机器人参数-从站配置,然后点击机器人-修改,在机器人类型里选择要更改的机器人型号(以六轴机器人为例),保存。

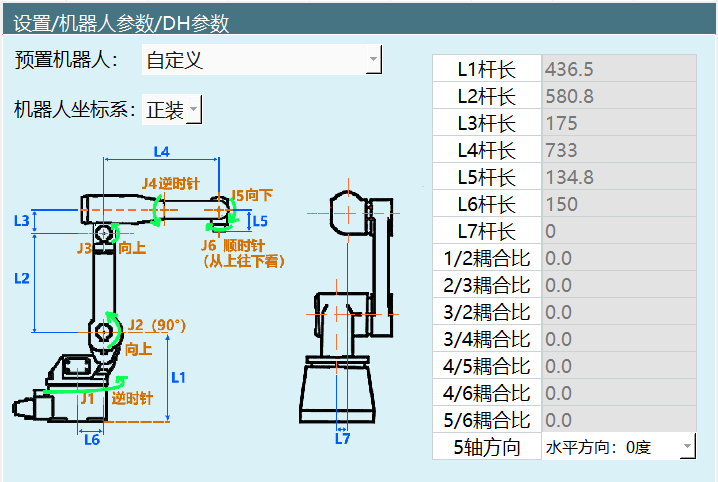
### (2)机器人参数设置
在纳博特示教器界面点击设置-机器人参数-DH参数,依据机器人型号的DH参数值进行修改。
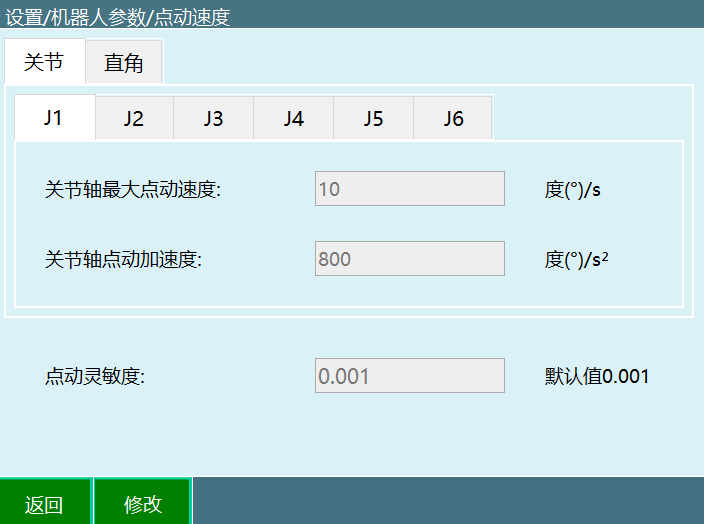
点击设置-机器人参数-关节参数,修改J1-J6六个轴的正反限位范围,同时修改六个轴的额定正转速,使额定正转速略大于下面的机器人关节点动速度。

点击设置-机器人参数-点动速度-关节,这只关节轴最大点动速度,使之略小于上文的额定正转速。
至此,纳博特示教器里机器人型号配置更改已完成。
- IOA-更新与安装
- 软件注册与安装
- 软件使用协议
- 注册与使用
- (一)、认识IOA基础界面功能
- UI界面与设置
- 软件环境设置
- 三维导航操作
- 3D导航球使用
- 快捷键与仿真
- IOA开发工具下载汇总
- (二)、三维场景搭建
- 坐标及旋转
- 模型树与拼接
- 从SolidWorks到IOA放置的模型自制
- IOA辅助工具
- (三)、虚拟电气与调试
- (三)、虚实控制与编程
- 西门子PLC的仿真与控制
- 实体S7-1200控制器的添加
- 虚拟S7-1200控制器的添加
- 西门子PLCS7-1512控制器的添加
- 三菱PLC的仿真与控制
- 三菱PLC仿真器的使用说明
- 三菱PLC的添加与说明
- 工业机器人(纳博特)仿真
- 工业机器人(KEBA)仿真
- 工业机器人(埃夫特)仿真
- 协作机器人(遨博)仿真
- 运动控制(ZMC308)正运动仿真
- 机器视觉(VPLC516)正运动仿真
- 微型机器人(开塔)仿真
- 开塔机器人使用教程
- IOA与开塔机器人仿真
- 工业机器人(ABB)仿真
- Py-teach快速编程仿真
- Py-teach与IOA仿真
- Py-teach语法与编程
- Python编程与仿真
- Python与IOA仿真方法
- Python编程API说明
- 树莓派与IOA仿真
- EAIDK610与IOA仿真
- 单片机接入与仿真控制
- Mixly与IOA
- ArduinoIDE
- Mixly-MEGA_S虚拟工厂SDK
- Mixly-UNO_S虚拟工厂SDK
- Mixly-ESP32虚拟工厂SDK
- (四)、自定义控制器添加
- modbus-tcp自定义控制器