
[TOC]
## 1、PV大皮带
模型图片:

用途:
用于耗材的物流运输
参数(尺寸/功能):
(1)宽度:500,1000,1500,2000,2500,3000,单位mm
(2)长度:1000,2000,3000,4000,5000,6000,单位mm
备注:
PV大皮带其中心点在其底部,该模型厚度为80mm
控制接口:
(1)使能:DO控制,高电平控制传输使能开始转动
(2)方向:DO控制,高低电平设置转动方向,默认正方向
(3)速度:Float32控制,0~10的模拟量控制
类似模型:PV小皮带、PV双皮带、GT滚筒、PV90度转向(100、200、300、400、500、1000)
*****
## 2、十字转向-500
模型图片:

参数(尺寸/功能):
用于传输物料和耗材的十字转向
说明:
十字转向传输带为XY两个方向的转向传输,其下部具有顶升气缸,当需要转向时候通过顶升气缸顶起进行转向
控制接口:
(1)X使能:DO控制,X方向对传输带传输使能,即滚筒传输使能
(2)X方向:DO控制,X方向对传输带方向控制,即高电平为反方向
(3)X速度控制:Float32控制,0~10的模拟量控制速度
(4)Y气缸使能:DO控制,使能后气缸抬起,传输带可Y方向运行
(5)Y使能:DO控制,Y方向对传输带传输使能,即滚筒传输使能
(6)Y方向:DO控制,Y方向对传输带方向控制,即高电平为反方向
(7)Y速度控制:Float32控制,0~10的模拟量控制速度
类似模型:十字转向-300、十字转向-1000
*****
## 3、阻挡气缸
模型图片:
用途:
阻挡物料
参数(尺寸/功能):
长度:500,1000,1500,2000,2500,3000,单位mm
说明:
使能打开,气缸顶起阻挡物料,并提供阻挡反馈
控制接口:
(1)使能:DO控制,高电平控制气缸顶起
(2)阻挡反馈:DI控制,阻挡物料后高电平
类似模型:滚动阻挡器
*****
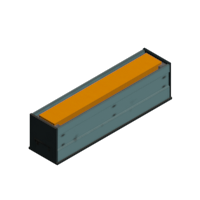
## 4、称重传输带
模型图片:

用途:
称重传输带能够运输和对耗材进行称重,其传输带具有模拟量反馈能够测量耗材重量反馈至仪表盘
参数(尺寸/功能):
宽度:500,1000,1500,2000,单位mm
控制接口:
(1)使能:DO控制,高电平控制皮带运转
(2)方向:DO控制,高低电平设置转动方向,默认正方向
(3)速度控制:Float32控制,0~10的模拟量控制速度
(4)称重反馈:Float32反馈,模拟量显示皮带线上的物料重量,以KG计量
*****
## 5、1000升降传输
模型图片:

用途:
用于物料和耗材的升降传输
参数(尺寸/功能):
宽度:500,1000,1500,2000,单位mm
控制接口:
(1)电机接口:M伺服接口,用于控制传输带上下位置坐标,0~12500mm
(2)高度反馈:Float32反馈,模拟量显示皮带线的高度。
(3)皮带使能:DO控制,高电平控制皮带运转
(4)皮带方向:DO控制,高低电平设置转动方向,默认正方向
(5)皮带速度:Float32控制,0~10的模拟量控制速度
(6)下限位反馈:DI控制,皮带线到达最低点后高电平
(7)上限位反馈:DI控制,皮带线到达最高点后高电平
(8)光电检测:DI控制,皮带中间有耗材经过或遮挡时候光电高电平
*****
## 6、定位气缸
模型图片:

用途:
气缸夹紧定位物料位置
参数(尺寸/功能):
尺寸:200-1500,单位mm
控制接口:
(1)气缸使能:DO控制,高电平控制气缸夹紧
(2)负霍尔反馈:DI控制,气缸无使能输出高电平
(3)正霍尔反馈:DI控制,气缸有使能输出高电平
*****
## 7、皮带线附件
| 名称 |传送带支架 |斜坡滑台 |传输挡板 |
| --- | --- |--- |--- |
| 模型图片| 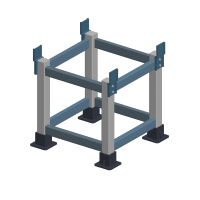 | 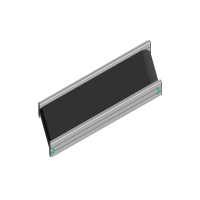 | |
| 用途 | 支撑皮带线 | 用来导引耗材滑动到地面或其它地方 | 阻挡、保护物料 |
| 参数(尺寸/功能): | 宽度:500 ~ 3000,单位mm 长度:500 ~ 3000,单位mm 高度:500 ~ 2000,单位mm |宽度:500~3000单位mm | 入口出口: 带倒角、无倒角;宽度:10 ~ 180 ,单位 mm;长度:200 ~ 3000,单位mm |
*****
- IOA简介
- 软件安装及注册
- 软件安装要求
- 西门子PLC仿真与安装
- 博图软件及仿真软件安装
- 实体1200PLC接入IOA
- 虚拟1200PLC接入IOA
- 虚拟1500PLC接入IOA
- S7-1214接入IOA信号说明
- S7-1512接入IOA信号说明
- ZMC运动控制系列仿真与安装
- ZMC308BE控制器说明
- ZMC308BE接入IOA仿真
- KEBA工业机器人软件安装使用及仿真
- 软件安装及维护
- IOA仿真与虚拟示教器
- IOA仿真与真实示教器
- 单片机控制与仿真
- arduino-uno控制器
- uno接入说明
- uno函数库
- arduino-mega控制器
- mega接入说明
- mega函数库
- ESP32物联网单片机
- ESP32接入说明
- ESP32库函数
- Python虚拟示教器控制器
- 虚拟机器人示教器
- 基础模块
- Mbus-S虚拟工厂模块
- Mbus-R4模块
- 物联网模块
- Python 环境搭建
- 视觉相机应用
- 图像识别助手说明
- 视觉相机接入IOA方法
- 软件注册
- 软件下载
- 软件安装
- 快速入门
- 快速上手视频合集
- 软件界面及基本操作
- IOA界面应用基础操作
- UI界面说明
- 快捷键应用
- 3D导航模式
- 3D场景布局操作
- 控制器连接
- 11
- IOA模型库概览
- 物流传输模型库说明
- 机械零件模型说明
- 机电单元模型说明
- 传感交互模型说明
- 人机交互模型
- 传感器模型
- 虚拟继电模型
- 机器人模型
- 物料模型库
- 移动机器人
- 建筑模型库
- 5分钟入门课程包
- 西门子PLC实训课程资源包
- 工业机器人示教与编程
- ZMC运动控制与编程
- 嵌入式入门与仿真
- 系统集成与应用