
## IOA-Python编程工具
在IOA中,内嵌了虚拟的机器人示教器。该示教器使用图形化的python编程语言,通过图形化的Python编程工具,像拼积木一样的拼接处python代码。轻松实现对机器人(四轴机器人Mbus-R4)或8个运动电机(P8运动控制器 Mbus-S)进行控制。
**打开python编程:**
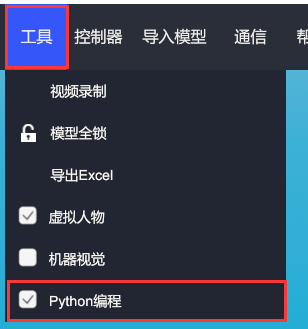
在IOA中点击“工具”,钩选“python编程”加载python编程工具。此时IOA右侧出现标志,
点击即可打开或隐藏python图形化编程窗口:
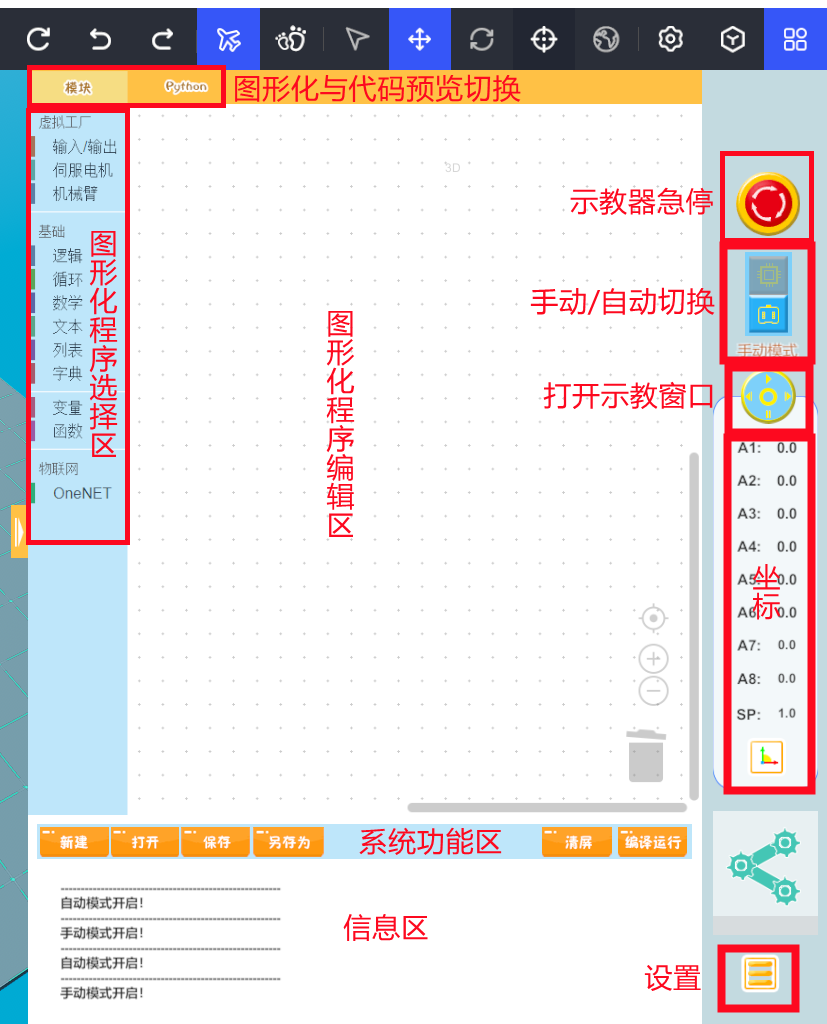
图形化编程工具是通过图形化模块的方式来编程,通过查看图形化模块生成的python代码。
***
**新建python编程:**
点击按钮即可新建python工程。
***
**打开python编程:**
点击保存好的工程文件,文件扩展名.xml。
***
**保存和另存为:**
点击保存或另存为图形化编程文件,扩展名为xml。
***
**编译运行:**
点击按钮,编译并运行python程序代码。
下方信息栏会输出打印的文本信息
**急停:**
点击按钮,可以停止示教器的控制输出。
**手动/自动:**
点击,在手动模式与自动之间切换。松动模式下,可以通过示教器窗口,手动控制机械手动作。自动模式下,可以通过图形化编写的Python控制机器人动作。
**摇杆**
手动模式下点击,打开摇杆控制窗口,在该窗口下手动操作机械手: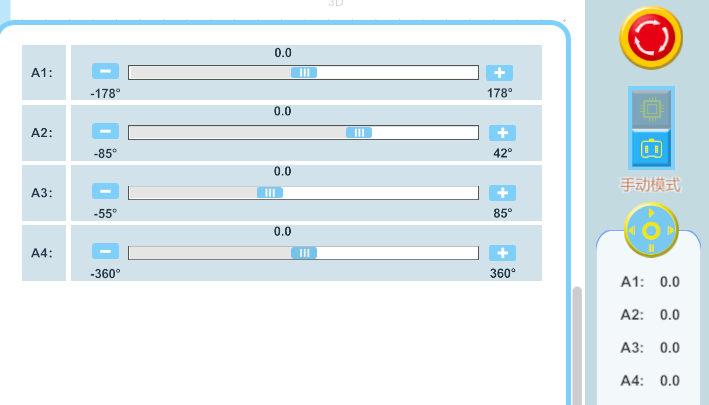
**设置菜单**
点击打开示教器菜单,
- IOA简介
- 软件安装及注册
- 软件安装要求
- 西门子PLC仿真与安装
- 博图软件及仿真软件安装
- 实体1200PLC接入IOA
- 虚拟1200PLC接入IOA
- 虚拟1500PLC接入IOA
- S7-1214接入IOA信号说明
- S7-1512接入IOA信号说明
- ZMC运动控制系列仿真与安装
- ZMC308BE控制器说明
- ZMC308BE接入IOA仿真
- KEBA工业机器人软件安装使用及仿真
- 软件安装及维护
- IOA仿真与虚拟示教器
- IOA仿真与真实示教器
- 单片机控制与仿真
- arduino-uno控制器
- uno接入说明
- uno函数库
- arduino-mega控制器
- mega接入说明
- mega函数库
- ESP32物联网单片机
- ESP32接入说明
- ESP32库函数
- Python虚拟示教器控制器
- 虚拟机器人示教器
- 基础模块
- Mbus-S虚拟工厂模块
- Mbus-R4模块
- 物联网模块
- Python 环境搭建
- 视觉相机应用
- 图像识别助手说明
- 视觉相机接入IOA方法
- 软件注册
- 软件下载
- 软件安装
- 快速入门
- 快速上手视频合集
- 软件界面及基本操作
- IOA界面应用基础操作
- UI界面说明
- 快捷键应用
- 3D导航模式
- 3D场景布局操作
- 控制器连接
- 11
- IOA模型库概览
- 物流传输模型库说明
- 机械零件模型说明
- 机电单元模型说明
- 传感交互模型说明
- 人机交互模型
- 传感器模型
- 虚拟继电模型
- 机器人模型
- 物料模型库
- 移动机器人
- 建筑模型库
- 5分钟入门课程包
- 西门子PLC实训课程资源包
- 工业机器人示教与编程
- ZMC运动控制与编程
- 嵌入式入门与仿真
- 系统集成与应用