
[TOC]
### Map
Go语言中提供的映射关系容器为`map`,其内部使用`散列表(hash)`实现,所以它是一种`无序`的基于`key-value`的数据结构,同时也是一种引用类型,必须初始化才能使用。
### 结构
map主要包含两个结构:`hmap`和`bmap`。
~~~
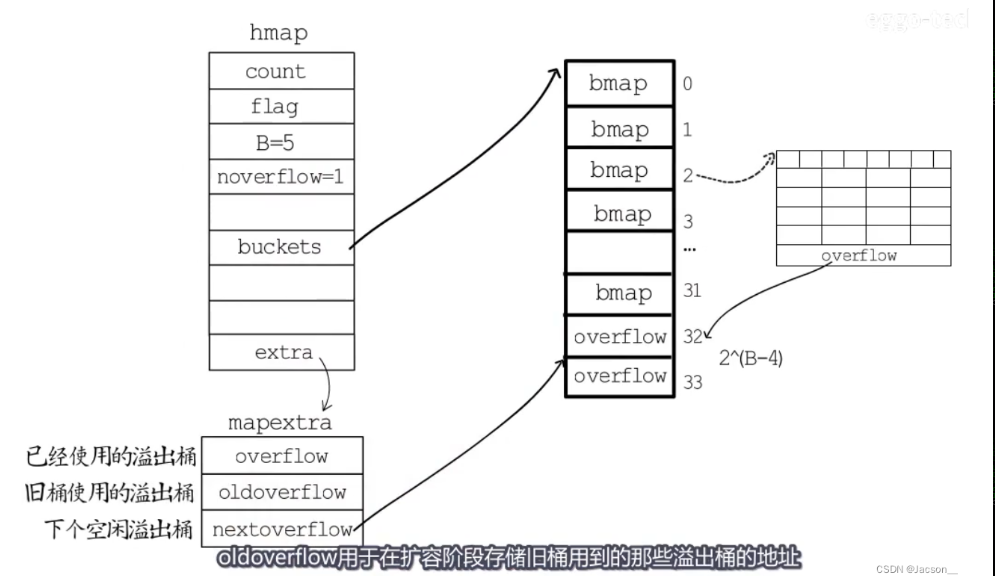
type hmap struct {
count int // 键值对的数目
flags uint8 //状态标识,比如是否在被写或者迁移等,因为map不是线程安全的所以操作时需要判断flags
B uint8 // 桶的数目,是2的多少次幂
noverflow uint16 // 记录使用的溢出桶的数量
hash0 uint32 // hash 种子,做key 哈希的时候会用到
buckets unsafe.Pointer // 2^B个桶对应的地址指针
oldbuckets unsafe.Pointer // 扩容阶段记录旧桶的指针
nevacuate uintptr // 迁移的进度,小于此地址的bucket已经迁移完
extra *mapextra // 溢出桶相关
}
type mapextra struct {
overflow *[]*bmap //已经使用溢出桶的地址集合
oldoverflow *[]*bmap //迁移过程中老的溢出桶的地址
nextOverflow *bmap //下一个空闲出的桶
}
type bmap struct {
tophash [bucketCnt]uint8
}
//在编译期间会产生新的结构体
type bmap struct {
tophash [8]uint8 //存储哈希值的高8位
data byte[1] //key value数据:key/key/key/.../value/value/value...
overflow *bmap //溢出bucket的地址
}
~~~
#### hmap
>溢出桶的创建
在创建map的时候如果B>=4,那么认为会使用到溢出桶的概率比较大,就会创建2^(B-4)个溢出桶,在内存上和常规的hmap是连续的。
#### bmap
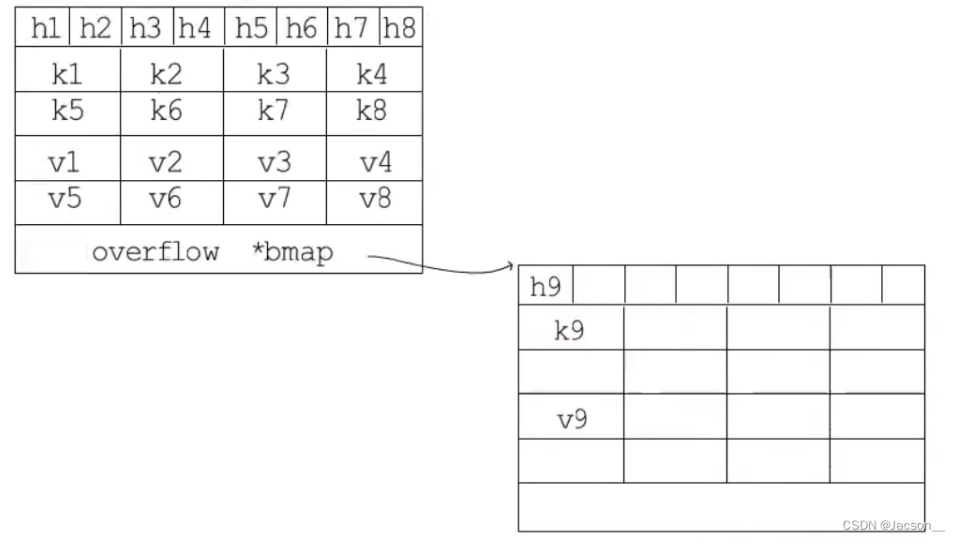
map使用的桶就是bmap,一个桶里可以放8个键值对,但是为了让内存排列更加紧凑,8个key放一起,8个value放一起,8个key的前面则是8个tophash,每个tophash都是对应哈希值的高8位。最后这里是一个bmap型指针,指向一个溢出桶overflow,溢出桶的内存布局与常规桶相同,是为了减少扩容次数而引入的,当一个桶存满了,还有空用的溢出桶时,就会在桶后面链一个溢出桶,继续往这里面存。
### 扩容
#### 扩容的方式
扩容有两种,一种是等量扩容,另一种是双倍扩容
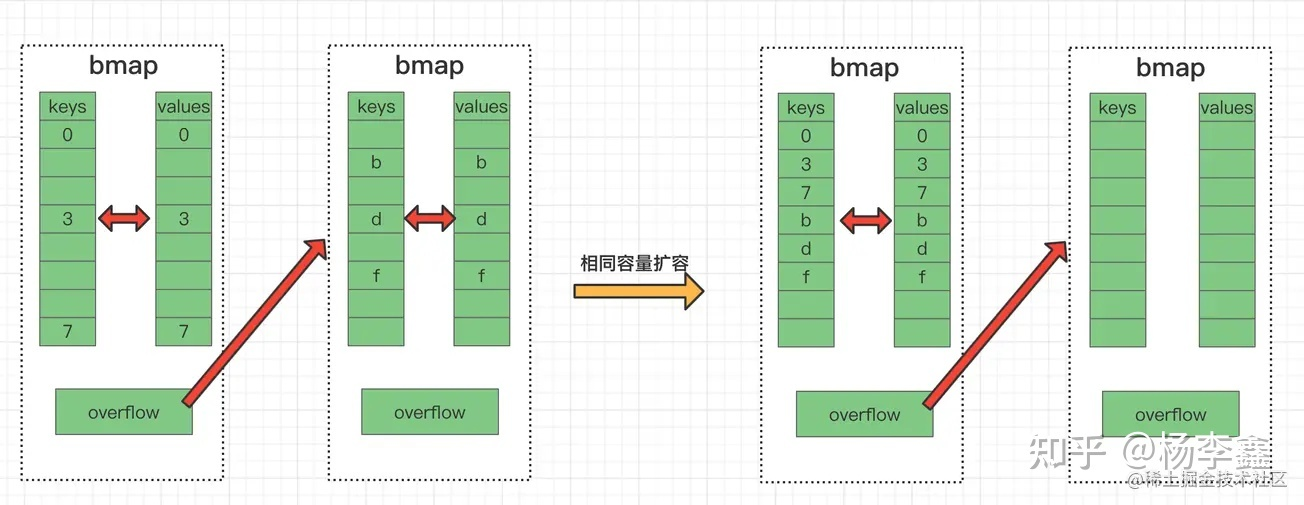
* **等量扩容**
负载因子没有超标,但是使用的溢出桶很多,就会触发等量扩容
>溢出桶多少的鉴定:
如果常规桶数目不大于2^15,那么使用溢出桶数目超过常规同就算是多了。
如果常规桶数目大于2 ^ 15,那么使用溢出桶数目一旦超过2^15就算是多了。
>原因
由于map中不断的put和delete key,桶中可能会出现很多断断续续的空位,这些空位会导致连接的bmap溢出桶很长,导致扫描时间边长。这种扩容实际上是一种整理,把后置位的数据整理到前面。**这种情况下,元素会发生重排,但不会换桶。**
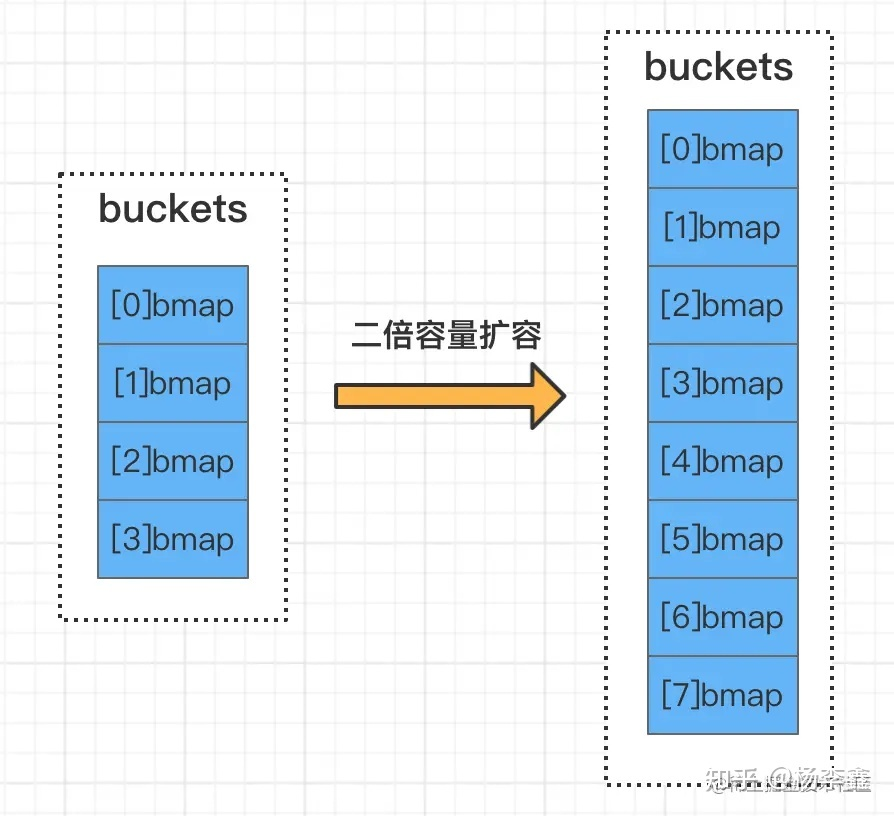
* **双倍扩容(翻倍扩容)**
超过了6.5的负载因子,导致双倍扩容
>原因
由于当前桶数组确实不够用了,**发生这种扩容时,元素会重排,可能会发生桶迁移**。
如图中所示,扩容前B=2,扩容后B=3,假设一元素key的hash值后三位为101,那么由上文的介绍可知,在扩容前,由hash值的后两位来决定几号桶,即 01 所以元素在1号桶。 在扩容发生后,由hash值得后三位来决定几号桶,即101所以元素会迁移到5号桶。
#### 什么时候扩容
* 触发`load factor`的最大值,负载因子已达到当前界限
* 溢出桶`overflow buckets`过多
#### 扩容详情
首先我们了解下**装载因子(loadFactor)**的概念
loadFactor:=count / (2^B) 即 装载因子 = map中元素的个数 / map中当前桶的个数
通过计算公式我们可以得知,**装载因子是指当前map中,每个桶中的平均元素个数。**
**扩容条件1**:**装载因子 > 6.5**(源码中定义的)
这个也非常容易理解,正常情况下,如果没有溢出桶,那么一个桶中最多有8个元素,当平均每个桶中的数据超过了6.5个,那就意味着当前容量要不足了,发生扩容。
**扩容条件2**:**溢出桶的数量过多**
当 B < 15 时,如果overflow的bucket数量超过 2^B。
当 B >= 15 时,overflow的bucket数量超过 2^15。
简单来讲,新加入key的hash值后B位都一样,使得个别桶一直在插入新数据,进而导致它的溢出桶链条越来越长。如此一来,当map在操作数据时,扫描速度就会变得很慢。及时的扩容,可以对这些元素进行重排,使元素在桶的位置更平均一些。
#### 扩容时的细节
1. 在我们的hmap结构中有一个oldbuckets吗,扩容刚发生时,会先将老数据存到这个里面。
2. 每次对map进行删改操作时,会触发从oldbucket中迁移到bucket的操作【非一次性,分多次】
3. 在扩容没有完全迁移完成之前,每次get或者put遍历数据时,都会先遍历oldbuckets,然后再遍历buckets。
### map的增删查
#### 增
**map的赋值流程可总结位如下几步:**
①**通过key的hash值后“B”位确定是哪一个桶**,图中示例为4号桶。
② 遍历当前桶,通过key的tophash和hash值,防止key重复,然后**找到第一个可以插入的位置**,即空位置处存储数据。
③如果**当前桶元素已满,会通过overflow链接创建一个新的桶**,来存储数据。
**关于hash冲突**:当两个不同的 key 落在同一个桶中,就是发生了哈希冲突。冲突的解决手段是采用链表法:在 桶 中,从前往后找到第一个空位进行插入。如果8个kv满了,那么当前桶就会连接到下一个溢出桶(bmap)。
#### 删
找到了map中的数据之后,针对key和value分别做如下操作:
~~~
1、如果``key``是一个指针类型的,则直接将其置为空,等待GC清除;
2、如果是值类型的,则清除相关内存。
3、同理,对``value``做相同的操作。
4、最后把key对应的高位值对应的数组index置为空。
~~~
#### 查
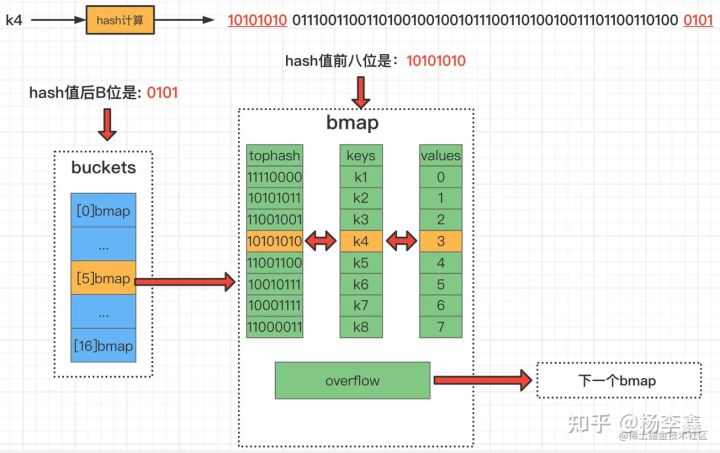
**假设当前 B=4 即桶数量为2^B=16个**,要从map中获取k4对应的value

**参考上图,k4的get流程可以归纳为如下几步:**
①**计算k4的hash值**。\[由于当前主流机都是64位操作系统,所以计算结果有64个比特位\]
②**通过最后的“B”位来确定在哪号桶**,此时B为4,所以取k4对应哈希值的后4位,也就是0101,0101用十进制表示为5,所以在5号桶)
③**根据k4对应的hash值前8位快速确定是在这个桶的哪个位置**(额外说明一下,在bmap中存放了每个key对应的tophash,是key的哈希值前8位),一旦发现前8位一致,则会执行下一步
④**对比key完整的hash是否匹配**,如果匹配则获取对应value
⑤**如果都没有找到,就去连接的下一个溢出桶中找**
为什么要多维护一个tophash,即hash前8位?
这是因为tophash可以快速确定key是否正确,也可以把它理解成一种缓存措施,如果前8位都不对了,后面就没有必要比较了。
### map的迁移
迁移的基础结构是`evacDst`数据结构如下:
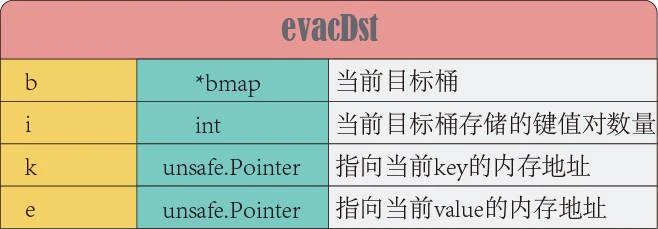
#### 迁移过程


### 总结
1. map的赋值难点在于数据的扩容和数据的迁移操作
2. bucket迁移是逐步进行的,在迁移的过程中每进行一次赋值,会做至少一次迁移工作。
3. 扩容不一定会增加空间,也可能只是做了内存整理
4. tophash的标志即可以判断是否为空也可以判断是否搬迁(用户key的tophash最小值为5,5以下为标识,用于标识此tophash对应的值的搬迁进度及状态),以及搬迁的位置。
5. 从map中删除key,有可能导致出现很多空的kv,这会导致迁移操作,如果可以避免,尽量避免。
### 线程不安全
**map是线程不安全的**
在同一时间点,两个 goroutine 对同一个map进行读写操作是不安全的。举个栗子:
某map桶数量为4,即B=2。此时 goroutine1来插入key1, goroutine2来读取 key2. 可能会发生如下过程:
① goroutine2 计算key2的hash值,B=2,并确定桶号为1。
② goroutine1添加key1,触发扩容条件。
③ B=B+1=3, buckets数据迁移到oldbuckets。
④ goroutine2从桶1中遍历,获取数据失败。
在工作中,当我们涉及到对一个map进行并发读写时,一般采用的做法是采用golang中自带的mutex锁
~~~go
type Resource struct {
sync.RWMutex
m map[string]int
}
func main() {
r := Resource{m: make(map[string]int)}
go func() { //开一个goroutine写map
for j := 0; j < 100; j++ {
r.Lock()
r.m[fmt.Sprintf("resource_%d", j)] = j
r.Unlock()
}
}()
go func() { //开一个goroutine读map
for j := 0; j < 100; j++ {
r.RLock()
fmt.Println(r.m[fmt.Sprintf("resource_%d", j)])
r.RUnlock()
}
}()
}
~~~
* 对map数据进行操作时不可取地址
因为随着map元素的增长,map底层重新分配空间会导致之前的地址无效。
### map的key值
**能作为map key 的类型包括:**
|类型 |说明|
| --- | --- |
|boolean 布尔值 | |
|numeric 数字 | 包括整型、浮点型,以及复数 |
|string 字符串 | |
|pointer 指针 | 两个指针类型相等,表示两指针指向同一个变量或者同为nil |
|channel通道 | 两个通道类型相等,表示两个通道是被相同的make调用创建的或者同为nil |
|interface 接口| 两个接口类型相等,表示两个接口类型 的动态类型 和 动态值都相等 或者 两接口类型 同为 nil |
|structs、arrays |只包含以上类型元素
| |
**不能作为map key 的类型包括:**
* slices
* maps
* functions
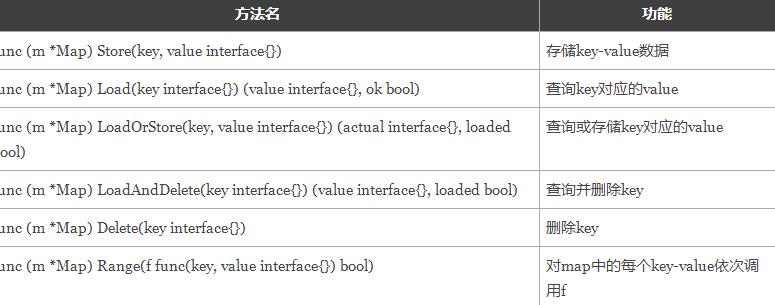
### sync.map (并发安全)
~~~
type Map struct {
mu Mutex //底层也是加锁了
read atomic.Value // readOnly
dirty map[interface{}]*entry
misses int
}
~~~
~~~go
package main
import (
"fmt"
"strconv"
"sync"
)
// 并发安全的map
var m = sync.Map{}
func main() {
wg := sync.WaitGroup{}
// 对m执行20个并发的读写操作
for i := 0; i < 20; i++ {
wg.Add(1)
go func(n int) {
key := strconv.Itoa(n)
m.Store(key, n) // 存储key-value
value, _ := m.Load(key) // 根据key取值
fmt.Printf("k=:%v,v:=%v\n", key, value)
wg.Done()
}(i)
}
wg.Wait()
}
~~~
### 链接
https://segmentfault.com/a/1190000040269520?sort=votes
https://zhuanlan.zhihu.com/p/495998623
- Go准备工作
- 依赖管理
- Go基础
- 1、变量和常量
- 2、基本数据类型
- 3、运算符
- 4、流程控制
- 5、数组
- 数组声明和初始化
- 遍历
- 数组是值类型
- 6、切片
- 定义
- slice其他内容
- 7、map
- 8、函数
- 函数基础
- 函数进阶
- 9、指针
- 10、结构体
- 类型别名和自定义类型
- 结构体
- 11、接口
- 12、反射
- 13、并发
- 14、网络编程
- 15、单元测试
- Go常用库/包
- Context
- time
- strings/strconv
- file
- http
- Go常用第三方包
- Go优化
- Go问题排查
- Go框架
- 基础知识点的思考
- 面试题
- 八股文
- 操作系统
- 整理一份资料
- interface
- array
- slice
- map
- MUTEX
- RWMUTEX
- Channel
- waitGroup
- context
- reflect
- gc
- GMP和CSP
- Select
- Docker
- 基本命令
- dockerfile
- docker-compose
- rpc和grpc
- consul和etcd
- ETCD
- consul
- gin
- 一些小点
- 树
- K8s
- ES
- pprof
- mycat
- nginx
- 整理后的面试题
- 基础
- Map
- Chan
- GC
- GMP
- 并发
- 内存
- 算法
- docker