
#### 粗配准
**功能描述**:对有重叠区域的两组点云数据进行初步配准,为精配准提供良好的初始值。
**步骤**:
1. 在资源项目管理中选择两组具有一定重叠区域的点云数据,点击按钮,弹出点云粗配准界面。
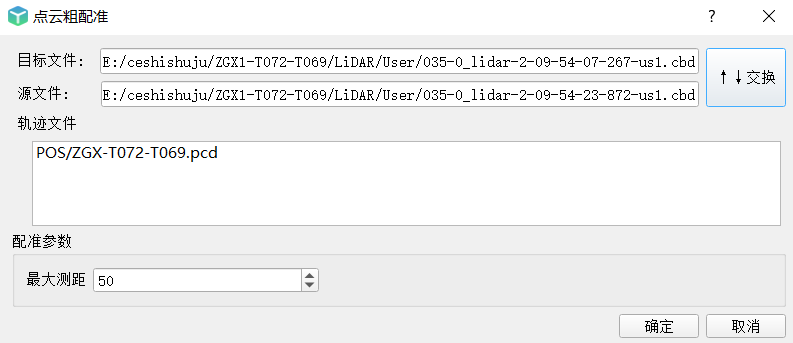
1. 完成参数设置后,点击“确定”进行粗配准。
参数设置
交换:交换目标文件和源文件数据。
最大测距:(默认为50m)采样时点云数据与轨迹数据之间的最大距离。
特别说明:移动LiDAR文件的配准需要轨迹文件
#### 精配准
**功能描述**:在粗配准的基础上,对两组点云数据进行精确配准。
**步骤**:
1. 在资源项目管理中选择两组具有一定重叠区域的点云数据,点击按钮,弹出点云精配准界面。
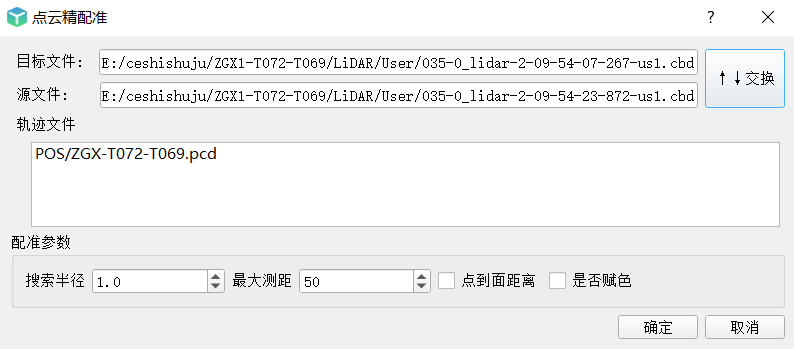
1. 完成参数设置后,点击“确定”进行精配准。
参数设置
交换:交换目标文件和源文件数据。
搜索半径:(默认为1.0m)根据中心点搜索相应最近点点集的距离。
最大测距:(默认为50m)采样时点云数据与轨迹数据之间的最大距离。
点到面距离:根据点到平面距离原则进行配准。
是否赋色:该选项勾选后,点云配准用于对点云进行赋色,将目标文件的颜色赋予源文件。

赋色前
赋色后
特别说明:移动LiDAR文件的配准需要轨迹文件
#### 旋转平移
功能描述:在粗配准的基础上,对两组点云数据进行精确配准。
**步骤**:
1. 在资源项目管理中选择两组具有一定重叠区域的点云数据,点击按钮,弹出点云精配准界面。
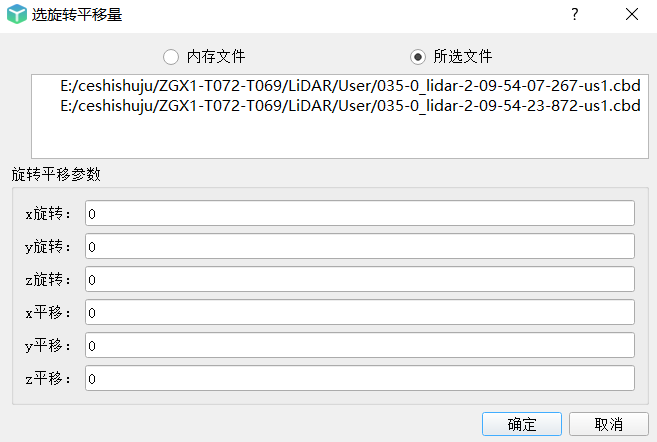
1. 完成参数设置后,点击“确定”进行精配准。
参数设置
x旋转:绕x轴旋转角度。
y旋转:绕y轴旋转角度。
z旋转:绕z轴旋转角度。
x平移:x方向平移量。
y平移:y方向平移量。
z平移:z方向平移量。
