
#### 航带分割
功能描述:按航向和时间将点云分割为若干小段,对点云数据进行航带分割预处理,处理后的各小段点云被用于航带匹配。
**步骤**:
1. 点击按钮,弹出航带分割设置界面。
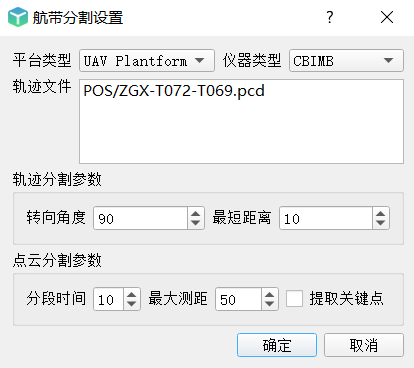
无人机平台参数设置界面
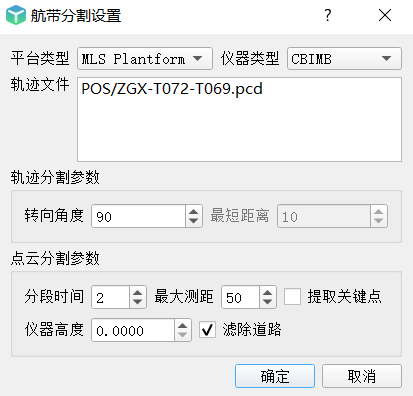
车载平台参数设置界面
2\. 设置航带分割参数,点击“确定”。
参数设置
平台类型:无人机平台和车载平台,不同平台类型方式处理过程有差异。
转向角度:(默认为90度)大于转向角度时进行分段分割。
最短距离:(默认为10米)应用于无人机平台,分割后短距离航带的点云被剔除。
分段时间:(无人机平台默认为10秒,车载平台默认为2秒)大于分段时间时进行分段分割。
最大测距:(默认为50米)大于最大测距的点被剔除。
提取关键点:是否提取出特征变化显著的点,一般适用于地形起伏较大的丘陵和山地地形分割匹配。
仪器高度:(默认为0米)应用于车载平台,POS系统几何中心到地面的垂直距离,小于等于0时会自动计算。
滤除道路:应用于车载平台,分割后道路面点云被剔除。
#### 航带匹配
**功能描述**:在航带分割后,检测重叠区域进行自动匹配获得同名对应。
**步骤**:
1. 点击按钮,弹出航带匹配设置界面。

1. 设置航带匹配参数,点击“确定”。
参数设置
平台类型:无人机平台和车载平台,不同平台类型方式处理过程有差异。
仅当前项目:当前项目不同航带间匹配。
操作多项目:不同项目之间或者同一项目不同航带之间进行匹配。
搜索半径:(默认为1.0米)航带之间匹配的同名对应搜索范围。
匹配时间相邻:用于前后相邻帧具有重叠的情况。
点到面距离:距离最小准则,默认为点到点距离最小准则。
利用关键点:是否利用特征变化显著的点进行匹配,一般适用于地形起伏较大的丘陵和山地地形分割匹配。
#### 航带平差
功能描述:利用重叠点云对位姿和进行优化和约束,提高精度。
步骤:
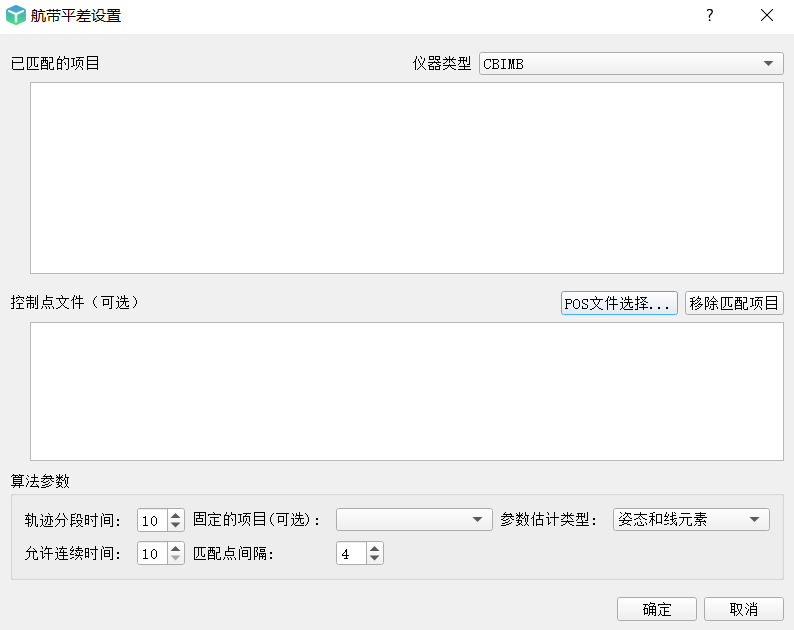
1\. 点击按钮,弹出航带平差设置界面。
2\. 设置航带平差参数,点击“确定”。
参数设置
轨迹分段时间:(默认为10s)大于分段时间时进行分段分割。
允许连续时间:(默认为10s)允许多长时间内轨迹上不存在匹配点。
匹配点间隔:(默认为4m)重采样间隔,选取重采样后的匹配点用于航带平差。
参数估计类型:对姿态和线元素参数估计进行选择。
固定的项目:在存在两个项目的条件下,选择一个项目作为固定的项目,作为平差的目标。
平差结束后,精度结果显示在信息输出窗口:

5个数值分别表示:x轴向、y轴向、z轴向、xoy平面、3D距离的均方根误差。
#### 点云修正
功能描述: 根据航带平差结果对点云进行修正。
步骤:
1\. 点击按钮,弹出点云修正设置界面。
2\. 设置点云修正参数,点击“确定”。
参数设置
仪器类型:根据点云数据选择对应的仪器类型。
