
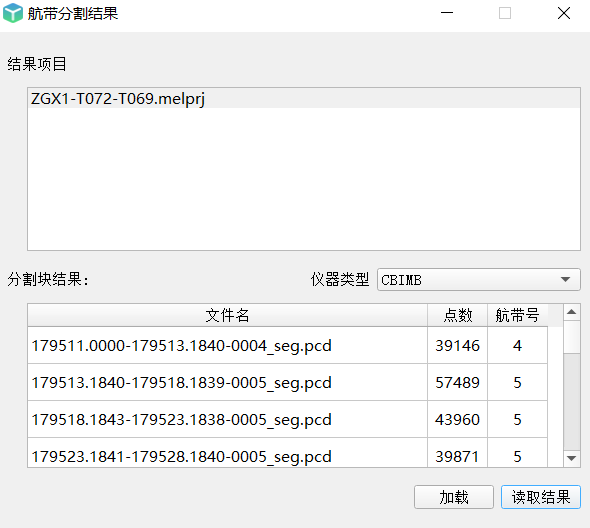
#### 航带分割结果
功能描述:对航带分割的结果进行查看。
步骤:
1\. 点击按钮,弹出航带分割结果查看界面。
1. 选择仪器类型,点击“读取结果”,加载分割结果信息。
操作设置
读取结果:将分割结果读取至分割块结果信息表。
加载:加载至编辑窗口显示,可以通过“按航带”渲染进行查看。
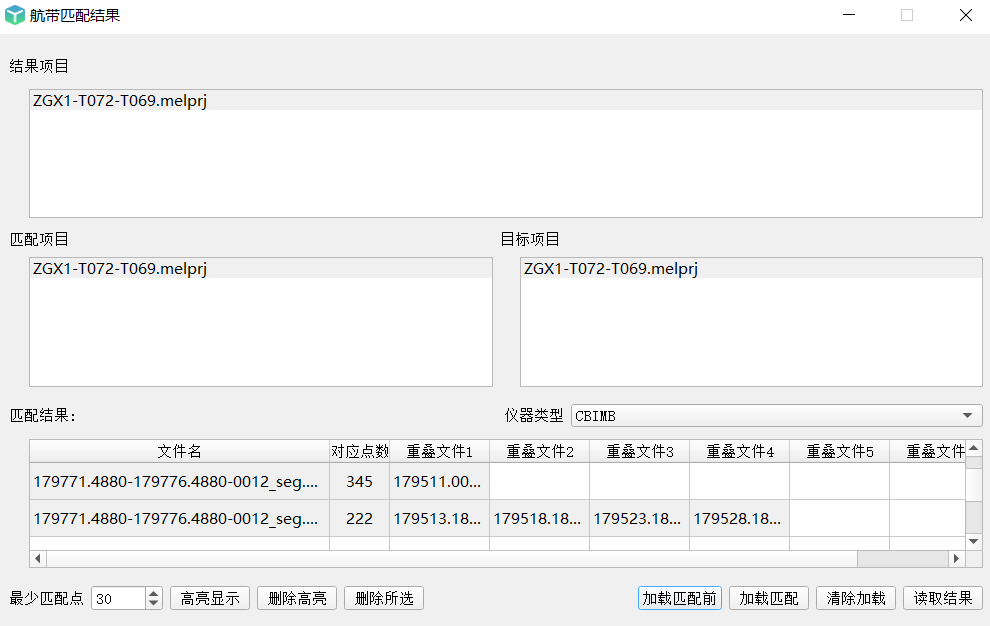
#### 航带匹配结果
功能描述:对航带匹配的结果进行查看。
步骤:
1. 点击按钮,弹出航带匹配结果查看界面。
1. 选择仪器类型,点击“读取结果”,加载匹配结果信息。
操作设置
最少匹配点:用于高亮显示的最少的对应点数。点数为0表示无重叠或者匹配失败。
高亮显示:小于最小匹配点数的匹配文件被高亮显示。
删除高亮:删除高亮显示的匹配文件。
删除所选:删除选中的匹配文件。
加载匹配前:将匹配前结果加载到内存并在编辑视图中显示,可以通过“按航带”渲染进行查看。
加载匹配:将匹配后结果加载到内存并在编辑视图中显示,可以通过“按航带”渲染进行查看。
清除加载:清除编辑视图中显示的匹配结果。
读取结果:将匹配结果读取至匹配结果信息表。
#### 航带平差结果
功能描述:对航带平差的结果进行查看。
步骤:
1. 点击按钮,弹出航带平差结果查看界面。

2\. 选择仪器类型,点击“读取结果”,加载平差结果信息。

操作设置
平差前RMSE阈值:平差前均方根误差。
平差后RSME阈值:平差后均方根误差,值为-1表示无重叠或者匹配失败。
高亮显示:不满足平差前后RMSE阈值的匹配文件被高亮显示。
删除高亮:删除高亮显示的匹配文件。
删除所选:删除选中的当前匹配文件。
加载匹配:将匹配结果加载到内存并在编辑视图中显示。
清除加载:将匹配结果从内存清除并不在编辑视图中显示。
读取结果:将平差结果读取至平差结果信息表。
