

ALiDAR采用文件管理方式进行操作,文件类别包括:载体POS文件、外标定文件、移动LiDAR文件、静态LiDAR文件、地面控制点文件、影像文件和电力文件等。为了快速体验,用户可添加点云文件至“移动LiDAR文件”,加载显示即可。用户操作时,建议将相关数据添加完善,以便数据处理时进行高效的调用和查阅。电力文件需要在电力模块添加。
#### 添加静态LiDAR文件
**功能**:添加静态LiDAR文件至所选项目,支持的数据格式包括Rigel原始文件(\*.rxp)、LAS文件(\*.las)、PCL文件(\*.pcd)等。
**步骤**:
1. 在项目资源管理窗口中选中要添加文件的项目,点击弹出静态LiDAR文件添加界面,选择“当前项目”、“文件类型”和“传感器类型”等,点击“导入”,选择相应的数据进行添加。对于误加载的数据,可以选中后点击,将其除去。如果导入的文件数超过“文件分割点数”,则导入后文件将按点数平均拆分为若干份。
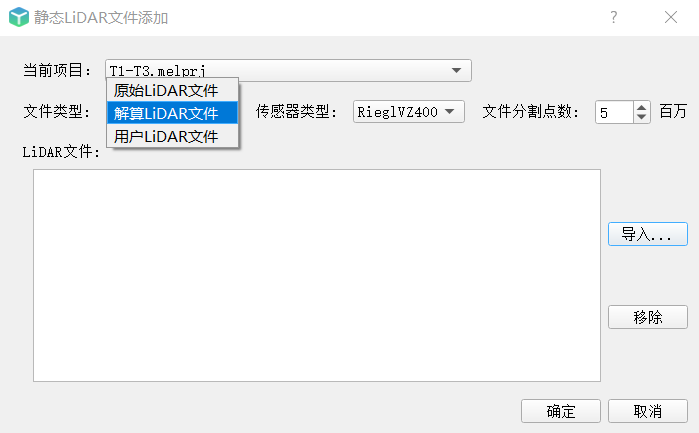
1. 点击“确定”完成数据添加,添加后的数据自动添加在项目资源管理窗口中。
说明:
- 原始LiDAR文件:静态激光扫描仪的未解算文件,由于本公司尚未完成该型产品开发,目前暂时不支持文件输入;
- 解算LiDAR文件:该文件为已经解算文件格式,文件支持\*.las以及\*.CBD文件格式;
- 用户LiDAR文件:该文件指用户处理后文件,文件格式支持\*.cbd、\*.las、\*.ply、\*.pcd等文件格式。
#### 添加移动LiDAR文件
**功能**:添加移动LiDAR文件至所选项目,支持的文件数据格式包括\*.rxp、\*.pcap、\*.cbd、\*.ply、\*.las、\*.pcd等。
**步骤**:
与添加静态LiDAR文件不同在于,移动LiDAR文件增加了精化LiDAR文件,该文件为通过本软件提供的“精化模块”处理之后的文件,为与其他文件区分开,避免造成数据不可恢复而增加的文件模块。如果导入的文件数超过“文件分割点数”,则导入后文件将按点数平均拆分为若干份。
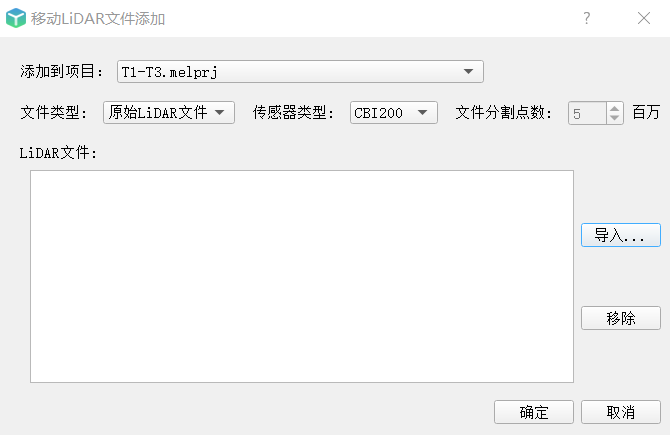
传感器类型目前支持4种传感器以及对于第三方激光雷达处理之后的数据“UNKNOWN”。
- CBI单线系统:该型号为奥伦达科技开发的单线长测程激光雷达,CBI-250/420/1350等产品;
- CBI多线系统:为奥伦达科技先发的多线激光雷达产品,CBI-100/120/200/S200等产品,若购买本公司产品,请务必对照用户手册进行相关传感器选择。
- UNKNOWN:第三方传感器或者第三方激光雷达数据。
说明:传感器类型仅影响数据解算,即购买本公司产品的用户,在添加原始LiDAR文件时,务必根据用户手册添加,错误添加会导致数据解算错误。
#### 添加地面控制点文件
**功能**:添加地面控制点文件至所选项目,支持的文件数据格式为LAS文件(\*.las)。
**步骤**:
1. 在项目资源管理窗口中选中要添加文件的项目,点击弹出地面控制点文件添加界面,选择“当前项目”、“文件类型”后,点击“导入”,选择相应的数据进行添加。对于误加载的数据,可以选中后点击,将其除去。
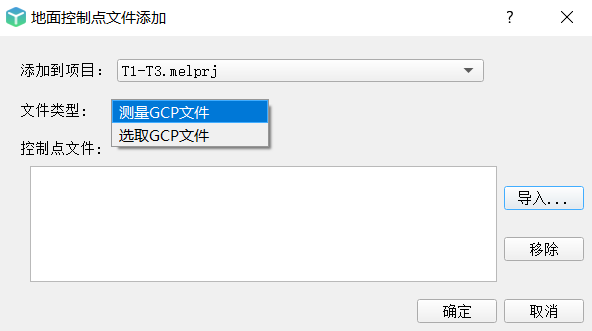
1. 点击“确定”完成数据添加,添加后的数据自动添加在项目资源管理窗口中。
#### 添加外标定文件
功能:添加外标定文件至所选项目,支持的文件数据格式为外标定文件(\*.para)。该文件仅与购买本公司硬件产品用户相关,其余用户请忽略。
**步骤**:
1. 在项目资源管理窗口中选中要添加文件的项目,点击弹出外标定文件添加界面,“选择”需要加载的外标定文件数据和“当前项目”,设置相应的“传感器类型”。
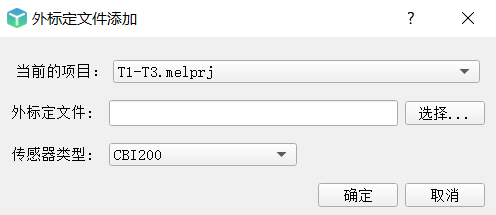
1. 点击“确定”完成数据添加,添加后的数据自动添加在项目资源管理窗口中。
#### 添加载体POS文件
**功能**:添加载体文件至所选项目,支持的文件数据格式为PCD文件(\*.pcd)。
**步骤**:
1. 在项目资源管理窗口中选中要添加文件的项目,点击弹出载体POS文件添加界面,选择“当前项目”、“文件类型”后,点击“导入”,选择相应的数据进行添加。导入文件类型有原始POS文件(\*.post/txt等)以及解算后pcd格式,针对post文件,软件会自动转换为pcd格式。对于误加载的数据,可以选中后点击,将其除去。针对一般用户,仅关注解算POS文件。
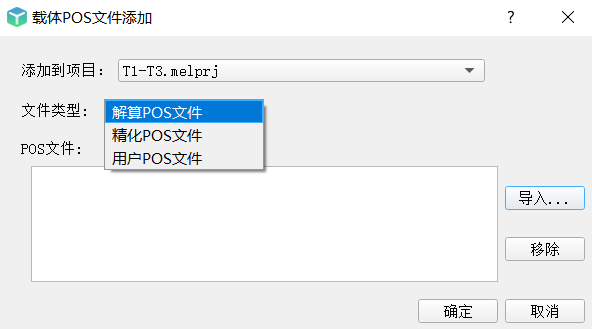
1. 点击“确定”完成数据添加,添加后的数据自动添加在项目资源管理窗口中。
#### 添加影像文件
**功能**:添加影像文件至所选项目,支持的文件数据格式为TIFF文件(\*.tif)、JPEG文件(\*.jpg)。
**步骤**:
1. 在项目资源管理窗口中选中要添加文件的项目,点击弹出载体影像文件添加界面,选择“当前项目”、“文件类型”后,点击“导入”,选择相应的数据进行添加。
1. 点击“确定”完成数据添加,添加后的数据自动添加在项目资源管理窗口中。
说明:
- 原始影像:该文件是指CCD传感器获取的原始影像,原始影像为中心投影影像,存在几何畸变;
- 正射影像:该文件为通过三方软件对原始影像进行处理获得的正射影像;
- 用户影像:该文件指用户指定的其它影像。
- 概况
- 安装与激活
- 软件安装
- 软件激活方法
- 激活码申请
- 在线激活
- 离线激活
- 用户登录
- 模块介绍
- 项目管理模块
- 工作空间
- 项目
- 添加文件
- 更改文件
- 加载点云
- 停止任务
- 析出数据
- 文件属性查看
- 选项
- 快捷操作
- 渲染模块
- 渲染模式
- 点云显示类型
- 轨迹显示类型
- 显示与定位
- 渲染设置
- 渲染视图
- 编辑模块
- 编辑模式
- 局部视图
- 扩展选择
- 选点类型
- 点操作
- 量测
- 保存编辑
- 控制点编辑
- 工具模块
- 重采样类型
- 按时间截取
- 数据分段
- 点云配准
- RGB更改
- 点云解析
- 精化模块
- 精化方法
- 结果查看
- 分类模块
- 分类方法
- 地物提取
- 电力模块
- 添加文件
- 杆塔标记
- 电力切档
- 电线补点
- 精细分类
- 矢量化
- 树障分析
- 精细巡检
- 视图模块
- 窗口视图
- 轨迹管理器
- 主题
- 附录