

#### 地面滤波
**注意:一个项目解析成很多文件时,可以根据电脑配置适当合并文件,最好是合并成一个文件,或者合并后再使用工具-点云分段功能,分割成块再进行地面滤波。解析后的单个文件由于点比较稀疏,提取效果较差,合并后的文件点密度大,地面提取效果更佳。**
功能:
用于提取地面点云。此算法源自张吴明教授团队提出的布料模拟滤波算法。参考论文《An Easy-to-Use Airborne LiDAR Data Filtering Method Based on Cloth Simulation.》,通过布料模拟下落的方式实现地面点云的提取。在此感谢张教授及其团队提出算法并免费开源。
若想了解更多关于布料滤波算法可访问(<http://ramm.bnu.edu.cn/>)。
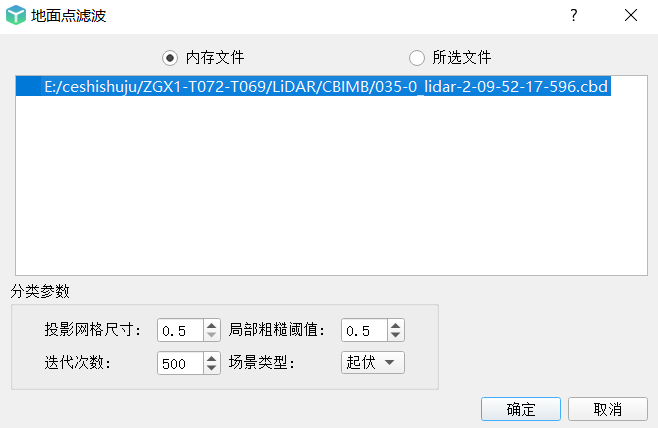
参数设置:
内存文件:在工程项目管理模块中使用 加载 功能后的文件数据,会显示在内存文件窗口中。
所选文件:在资源项目管理界面中选择的数据,会显示在所选文件窗口中。
投影网格尺寸:(默认0.5m)布料投影网格的分辨率,尺寸设置越小,分辨率越高,提取地面越精细,但耗时也会相应增加。
局部粗糙阈值:(默认0.5m):区域的高差阈值,高差在此范围之内的点云判断为地面。
迭代次数:(默认500次)多次重复提取地面,迭代次数越高,生成地面越精细,但耗时也会相应增加。
场景类型:(默认“起伏”)针对实际地形地势进行选择,有“平坦”、“起伏”、“陡峭”三种地形可供选择。
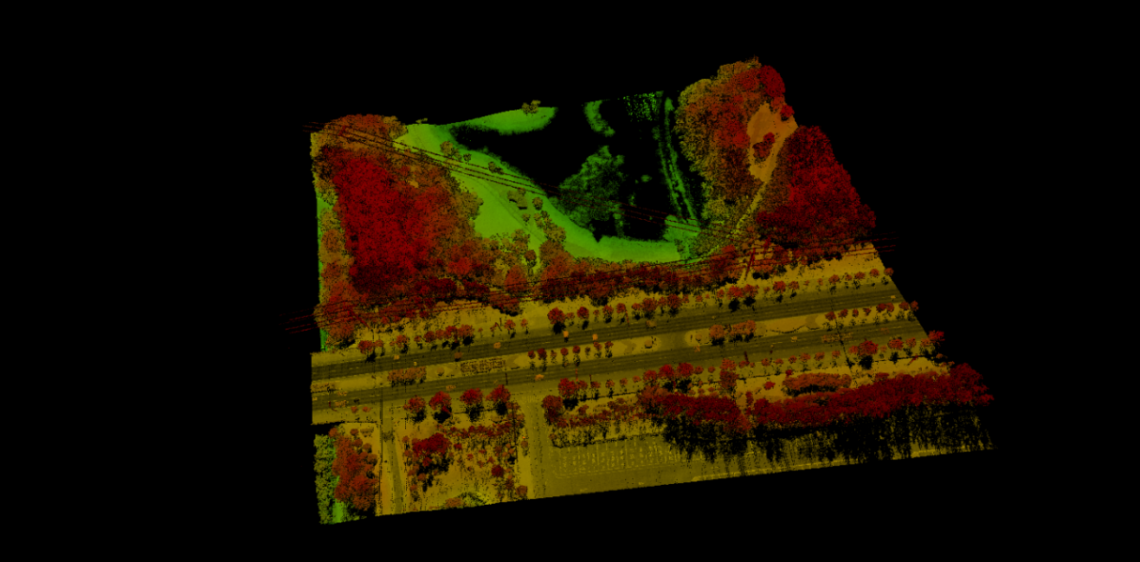
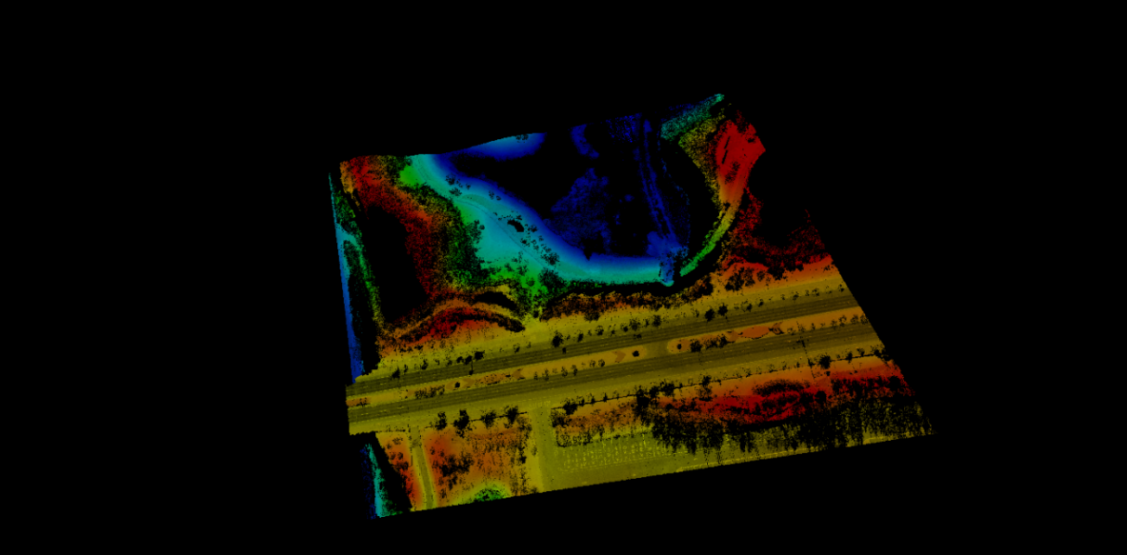
原始点云数据:
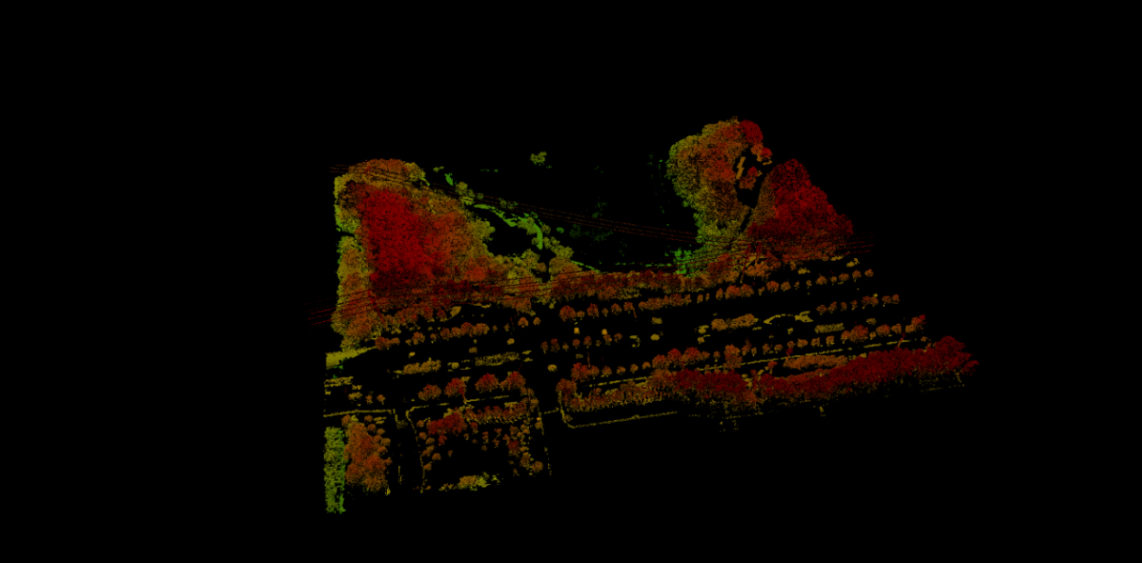
滤除地面后的地物点云数据:
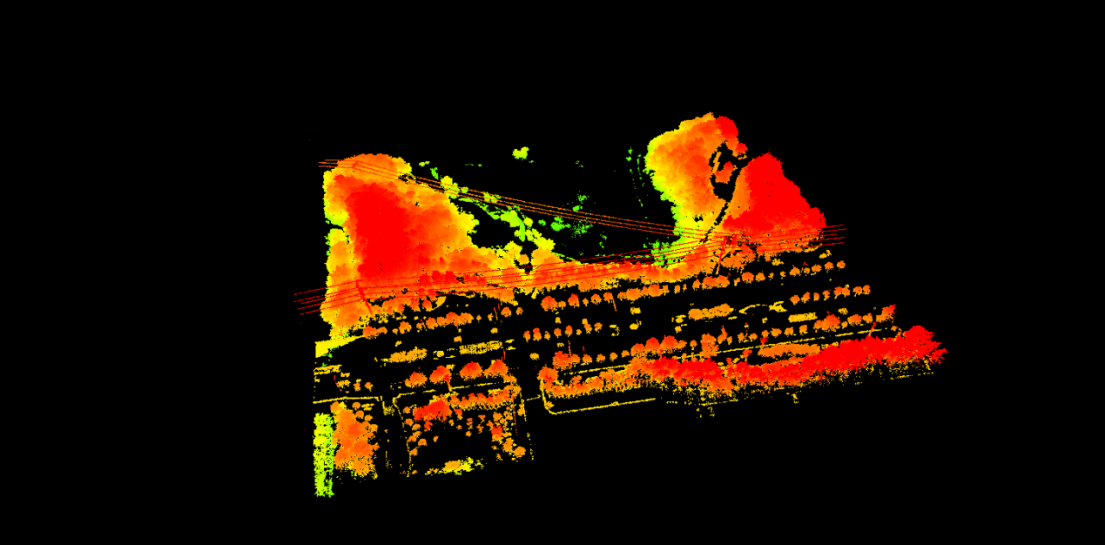
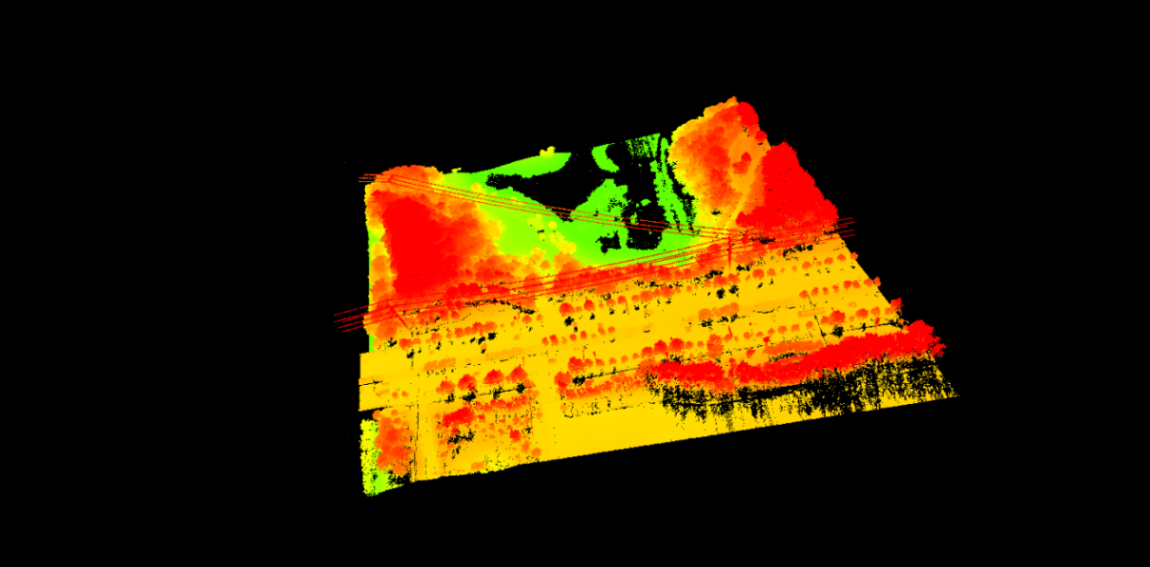
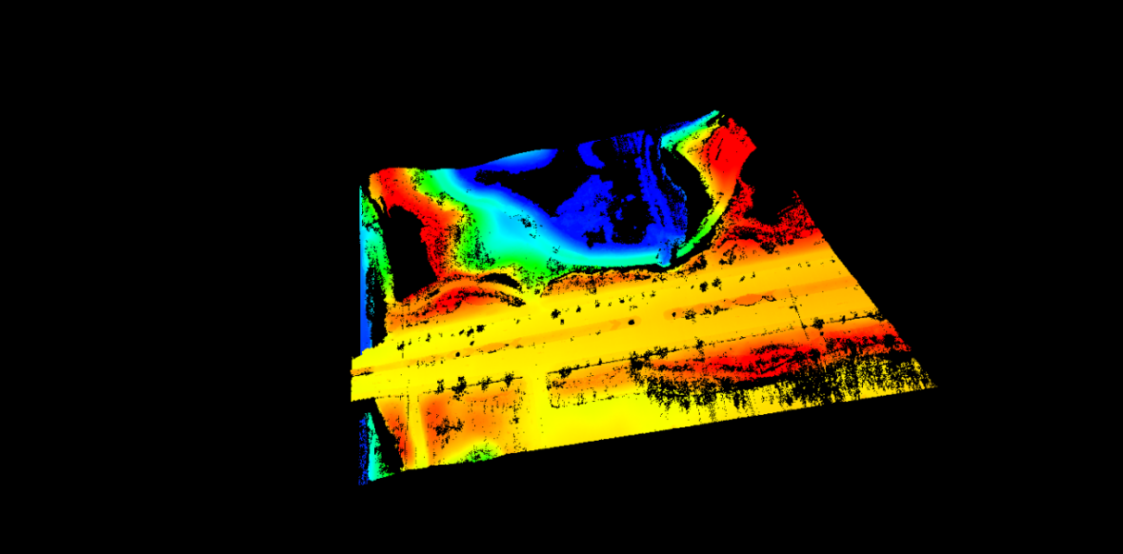
滤出的地面点云数据:
- 概况
- 安装与激活
- 软件安装
- 软件激活方法
- 激活码申请
- 在线激活
- 离线激活
- 用户登录
- 模块介绍
- 项目管理模块
- 工作空间
- 项目
- 添加文件
- 更改文件
- 加载点云
- 停止任务
- 析出数据
- 文件属性查看
- 选项
- 快捷操作
- 渲染模块
- 渲染模式
- 点云显示类型
- 轨迹显示类型
- 显示与定位
- 渲染设置
- 渲染视图
- 编辑模块
- 编辑模式
- 局部视图
- 扩展选择
- 选点类型
- 点操作
- 量测
- 保存编辑
- 控制点编辑
- 工具模块
- 重采样类型
- 按时间截取
- 数据分段
- 点云配准
- RGB更改
- 点云解析
- 精化模块
- 精化方法
- 结果查看
- 分类模块
- 分类方法
- 地物提取
- 电力模块
- 添加文件
- 杆塔标记
- 电力切档
- 电线补点
- 精细分类
- 矢量化
- 树障分析
- 精细巡检
- 视图模块
- 窗口视图
- 轨迹管理器
- 主题
- 附录