

用于标记无人机精细巡检航点,生成无人机精细巡检规划路径。
#### 添加标记
**功能:**在点云上标记包括目标点、拍照点、辅助点。目标点即巡检要拍照的目标,如绝缘子、塔基、塔身、挂点等。拍照点即无人机拍摄目标点时的停留航点。辅助点为无人机从一个拍照点飞行到下一个拍照点中需要绕过障碍的辅助航点。
步骤:
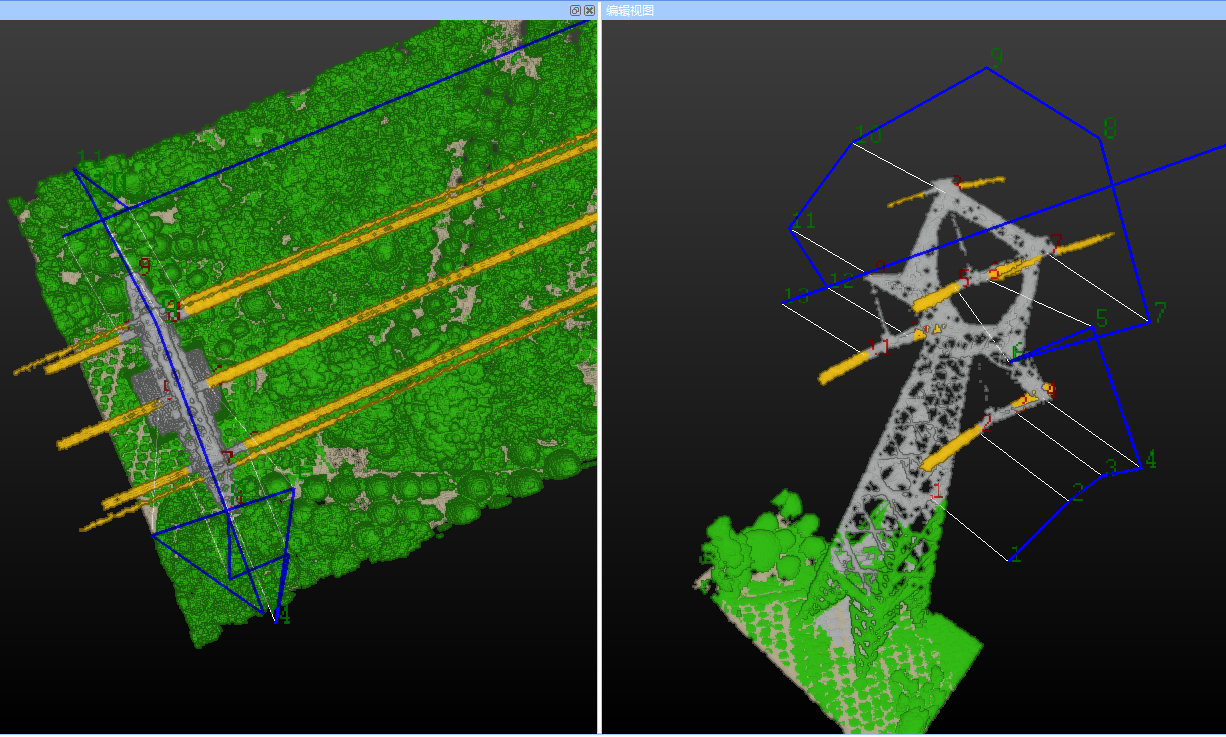
1、打开点云,将需要标记的铁塔选取到编辑视图,点击添加标记按钮,。
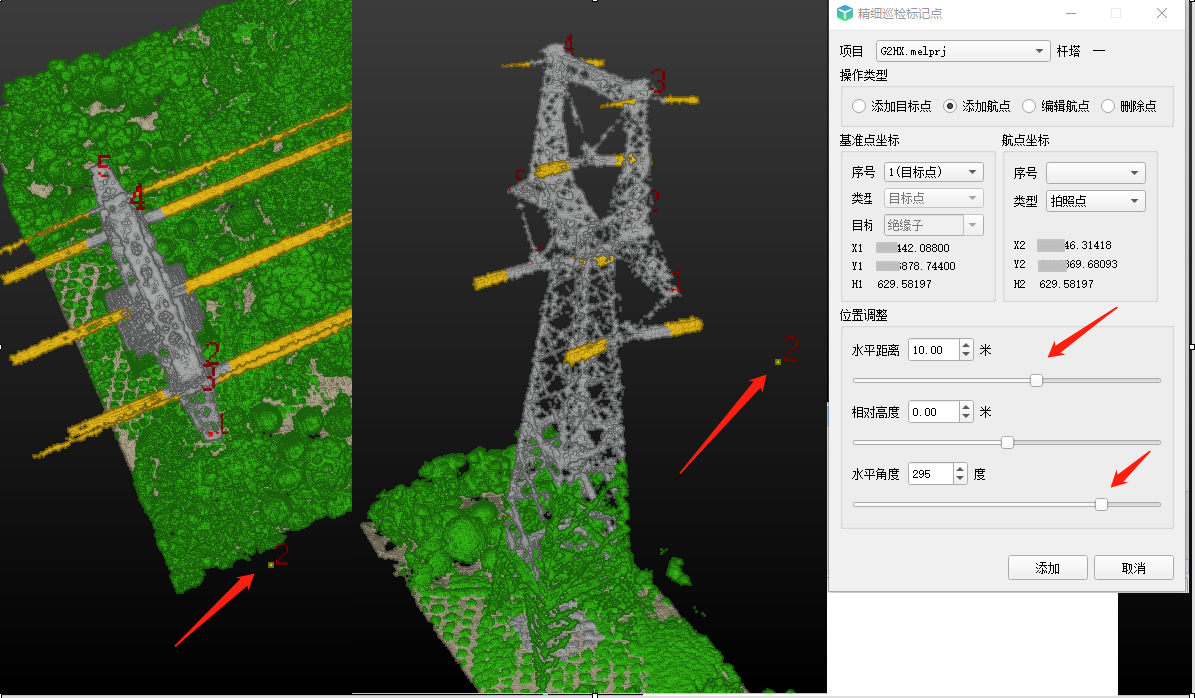
建议将左侧渲染视图切换到顶视图模式,方便查看标点的水平位置,右侧编辑视图用于标点。
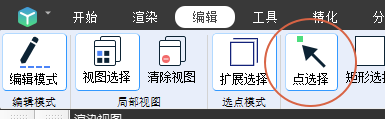
2、在编辑菜单中,点击选点模式,
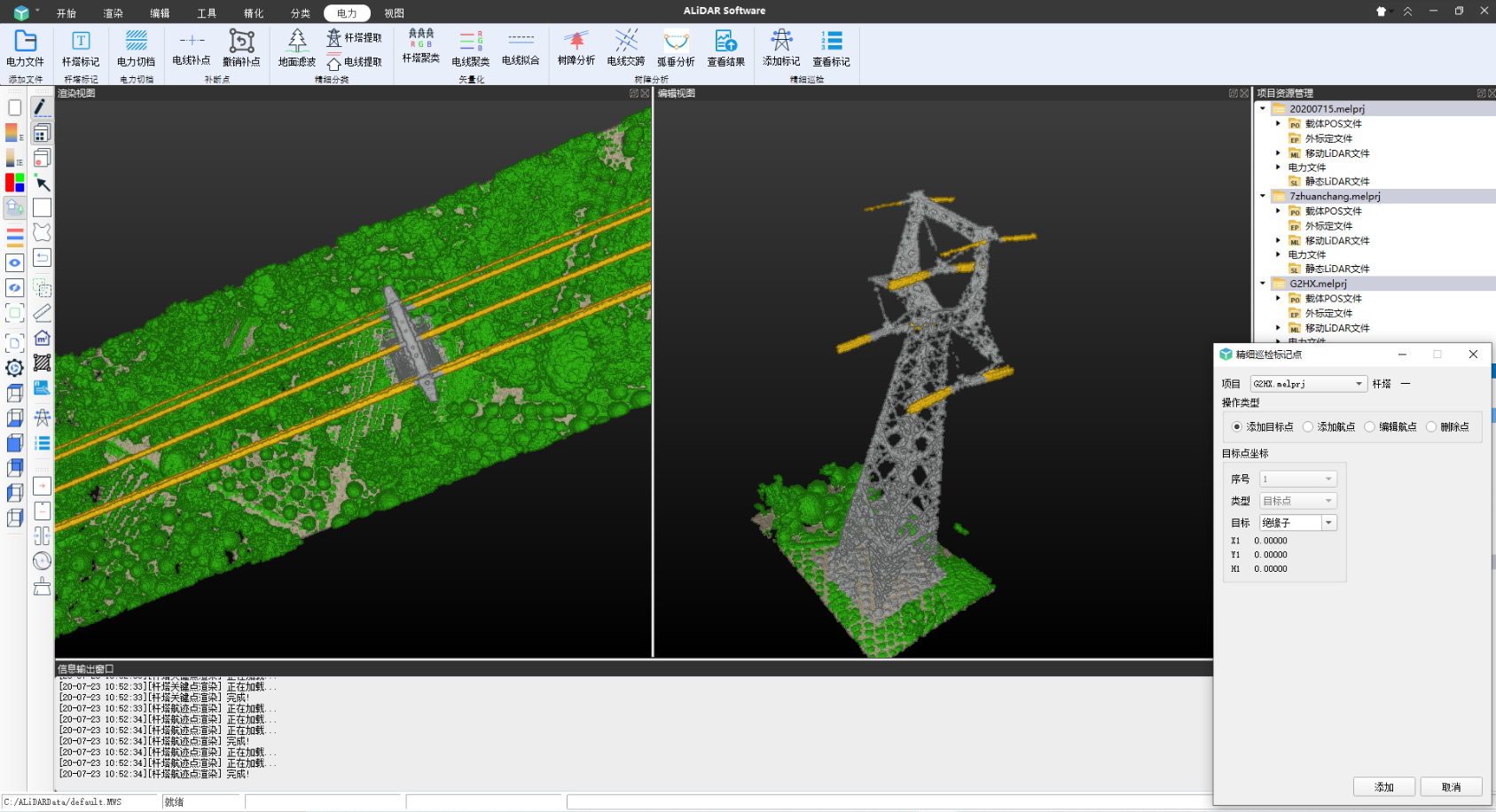
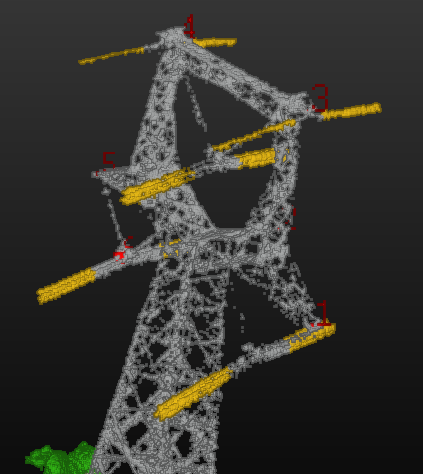
3、根据信息输出窗口提示,按住CTRL,在右侧编辑视图中点击目标点,比如某个绝缘端子。

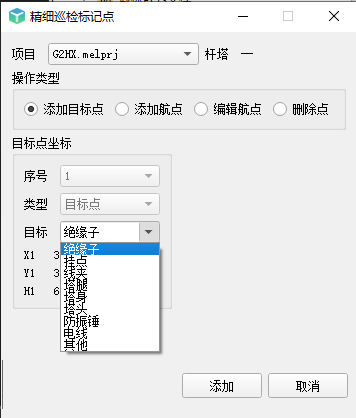
点击后,会看到标记对话框显示了所选点的XYZ坐标,目标下拉框表示目标的名称,需要用户自行选择。
设置好目标点信息后,点击添加按钮。若添加成功,会弹出提示窗口。
按照此步骤继续添加目标点。
4、添加航点
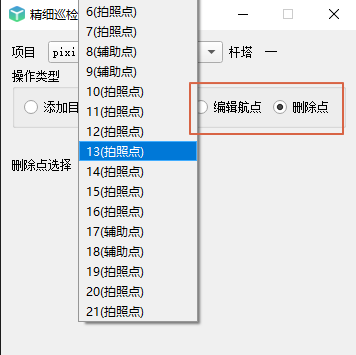
在操作类型栏下选择添加航点,在基准点坐标栏下序号下拉框选择一个位置参考点,可以是目标点,也可以是航点。以目标点未基准点,通常用于添加拍照点,以拍照点或辅助点为基准点,通常用于添加辅助点)
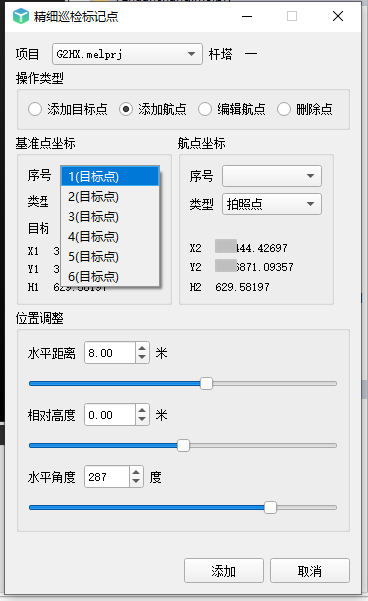
首先调整拍照点/辅助点与基准点的水平距离,再调整相对角度,在图上观察,使拍照点/辅助点移动到预期位置,点击添加。
按照相同的步骤,逐个添加。
对错误的点可以执行删除或编辑。
#### 查看标记
**功能:**查看上一步添加标记后的所有目标点、航点、辅助点的详细信息,为导出航点做准备。
步骤:
1、点击查看标记。
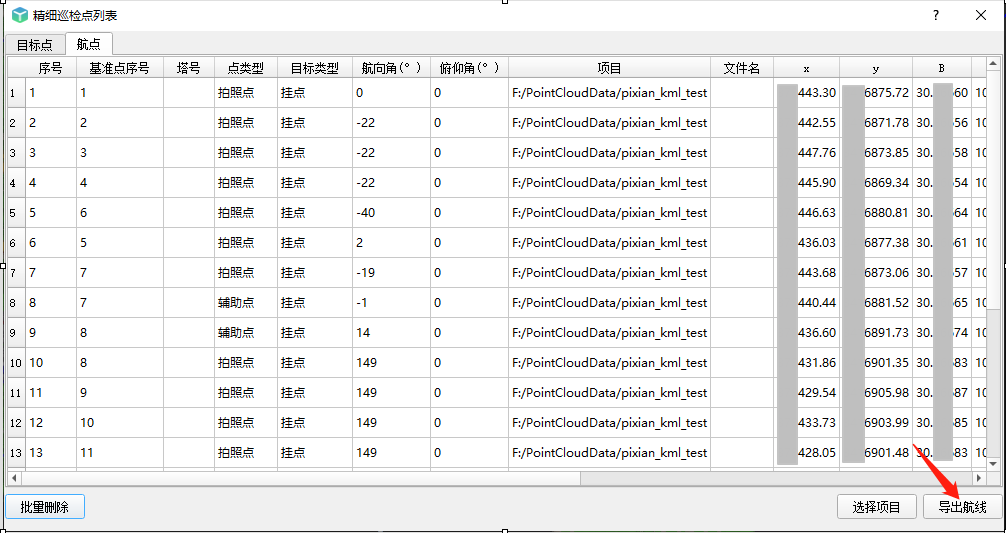
2、选择要查看标记的项目,点击确定后弹出精细巡检点列表对话框。
#### 导出航线
**功能:**将标记的航点(拍照点、辅助点)导出为固定格式的航点文件,用于导入无人机执行精细巡检任务。
步骤:
1、在标记列表对话框中,点击导出航线,选择保存的路径和名称,点击确定后导出。
航线文件支持从奥伦达科技的LiDAR助手APP导入,使用该APP可以操控大疆无人机执行巡检任务,具体请查看官网-服务与支持-下载中心。
- 概况
- 安装与激活
- 软件安装
- 软件激活方法
- 激活码申请
- 在线激活
- 离线激活
- 用户登录
- 模块介绍
- 项目管理模块
- 工作空间
- 项目
- 添加文件
- 更改文件
- 加载点云
- 停止任务
- 析出数据
- 文件属性查看
- 选项
- 快捷操作
- 渲染模块
- 渲染模式
- 点云显示类型
- 轨迹显示类型
- 显示与定位
- 渲染设置
- 渲染视图
- 编辑模块
- 编辑模式
- 局部视图
- 扩展选择
- 选点类型
- 点操作
- 量测
- 保存编辑
- 控制点编辑
- 工具模块
- 重采样类型
- 按时间截取
- 数据分段
- 点云配准
- RGB更改
- 点云解析
- 精化模块
- 精化方法
- 结果查看
- 分类模块
- 分类方法
- 地物提取
- 电力模块
- 添加文件
- 杆塔标记
- 电力切档
- 电线补点
- 精细分类
- 矢量化
- 树障分析
- 精细巡检
- 视图模块
- 窗口视图
- 轨迹管理器
- 主题
- 附录