

点云配准是点云数据处理的最基本功能,目的是完成坐标统一和精确匹配,使同一地物趋于吻合。两两点云配准一般包括两个步骤:粗配准和精配准,Alundar Platform软件提供了相应的粗配准和精配准算法。
#### 粗配准
**功能:**对有重叠区域的两组点云数据进行初步配准,为精配准提供良好的初始值。
**步骤**:
1. 在资源项目管理中选择两组具有一定重叠区域的点云数据,点击→按钮,弹出点云粗配准界面。
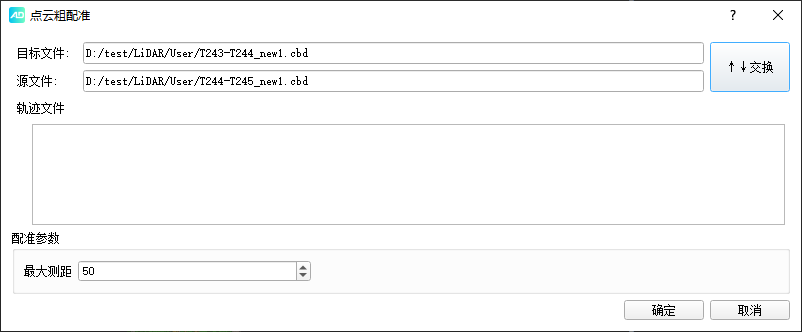
1. 完成参数设置后,点击→“确定”进行粗配准。
参数设置:
交换:交换目标文件和源文件数据。
最大测距:(默认为50m)采样时点云数据与轨迹数据之间的最大距离。
说明:移动LiDAR文件的配准需要轨迹文件
#### 精配准
**功能:**在粗配准的基础上,对两组点云数据进行精确配准。
**步骤**:
1. 在资源项目管理中选择两组具有一定重叠区域的点云数据,点击→按钮,弹出点云精配准界面。
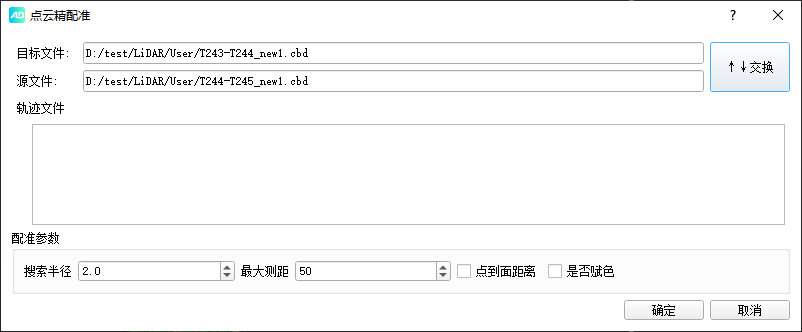
1. 完成参数设置后,点击→“确定”进行精配准。
参数设置:
交换:交换目标文件和源文件数据。
搜索半径:根据中心点搜索相应最近点点集的距离。当两点云偏差较大时,可适当增大搜索半径。
最大测距:(默认为50m)采样时点云数据与轨迹数据之间的最大距离。
点到面距离:根据点到平面距离原则进行配准。
是否赋色:该选项勾选后,点云配准用于对点云进行赋色,将目标文件的颜色赋予源文件。

赋色前
赋色后
#### 旋转平移
**功能:**在粗配准的基础上,对两组点云数据进行精确配准。
步骤:
1. 在资源项目管理中选择两组具有一定重叠区域的点云数据,点击→按钮,弹出点云精配准界面。
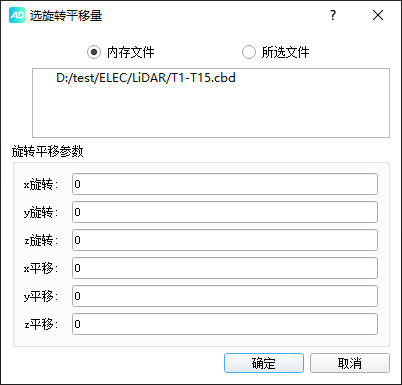
1. 完成参数设置后,点击→“确定”进行精配准。
参数设置:
x旋转:绕x轴旋转角度。
y旋转:绕y轴旋转角度。
z旋转:绕z轴旋转角度。
x平移:x方向平移量。
y平移:y方向平移量。
z平移:z方向平移量。
- 概况
- 安装与激活
- 软件安装
- 软件购买及激活方法
- 在线激活
- 加密狗激活
- 系统备份和恢复
- 用户登录
- 模块介绍
- 项目管理模块
- 工作空间
- 项目
- 添加文件
- 更改文件
- 加载点云
- 停止任务
- 析出数据
- 文件属性查看
- 选项
- 快捷操作
- 渲染模块
- 渲染模式
- 点云显示类型
- 轨迹显示类型
- 显示与定位
- 渲染设置
- 渲染视图
- 编辑模块
- 编辑模式
- 局部视图
- 扩展选择
- 选点类型
- 点操作
- 量测
- 保存编辑
- 控制点编辑
- 工具模块
- 重采样类型
- 按时间截取
- 数据分段
- 点云配准
- RGB更改
- 点云解析
- POS解算
- 精化模块
- 精化方法
- 结果查看
- 分类模块
- 分类方法
- 地物提取
- 电力模块
- 添加文件
- 杆塔标记
- 电力切档
- 补断点
- 精细分类
- 矢量化
- 电力分析
- 精细巡检
- 海量点云平台
- 视图模块
- 窗口视图
- 轨迹管理器
- 主题
- 附录