

Alundar Platform2.3提供了点云RGB颜色字段的更改功能,包括单颜色更改、正射赋色和三维赋色。单颜色更改是指将点云中某一类或某几类的颜色更改为指定的颜色。正射赋色和三维赋色是两种重要的点云与影像融合方式,可使点云信息更丰富,渲染更真实。正射赋色是将测区的CCD正射影像的颜色赋予点云。三维赋色则是将测区的倾斜摄影测量点云通过点云配准的方式赋予激光点云。
#### 单颜色
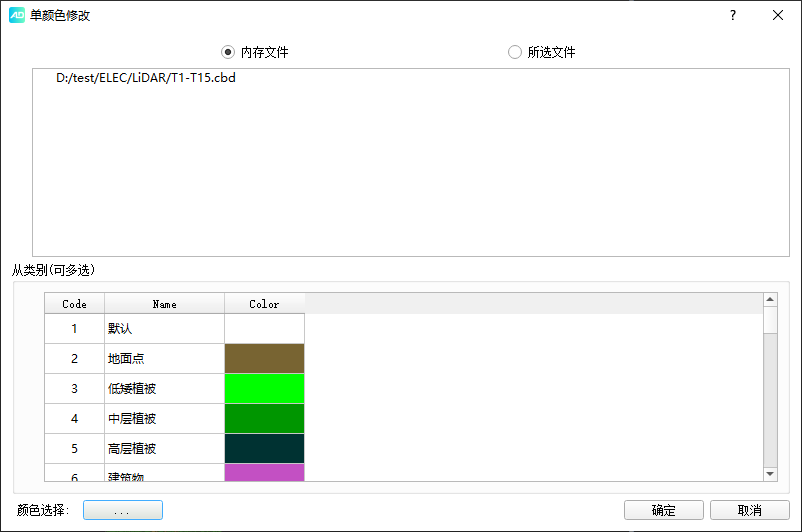
**功能:**修改点云的RGB颜色字段为某一选定的颜色。
**步骤**:
1\. 在资源项目管理界面中选择需要修改的点云文件。
2\. 点击→按钮,弹出颜色修改界面,设置需要的文件、点类别和修改后的颜色。
1. 设置完成后点击→“确定””,运行处理。
#### 单像赋色
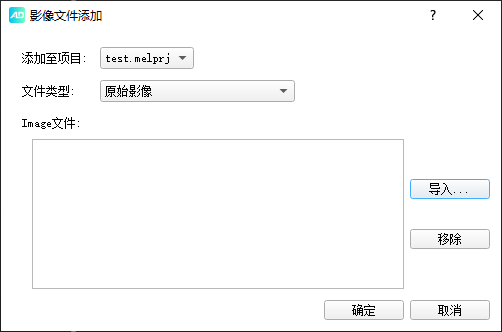
**功能:**使用Alundar Platform点云处理软件对原始激光点云数据进行解析,输出高精度激光点云数据。包括CBI-100\\CBI-120P\\CBI-200\\CBI-200P型号设备自带相机获取的影像数据,通过单像赋色对高精度激光点云数据进行单相赋色生成真彩点云。
步骤:
1\. 在“开始”界面,点击添加目标原始影像文件。
2\. 在资源项目管理界面中选择需要赋色的点云文件。
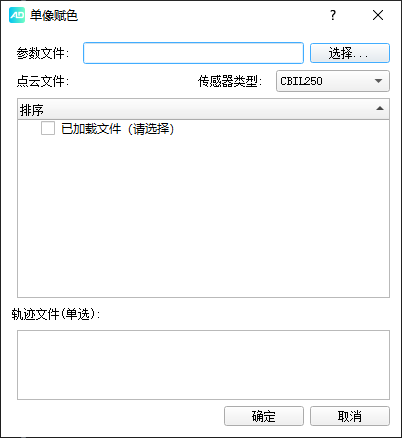
3\. 点击→按钮,弹出如图界面,选择参数文件、点云文件、传感器型号以及轨迹文件。
4\. 设置完成后点击→“确定”,运行处理。运行结束后,按颜色渲染点云进行查看。
#### 正射赋色
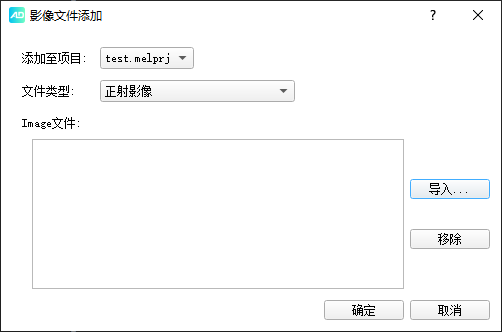
功能:将测区的正射影像(DOM)的颜色赋予点云。在获取原始数据影像(中心投影影像)后,正射影像(DOM)可以由三方影像软件制作。
**步骤**:
在“开始”界面,点击添加目标原始影像文件。
2\. 在资源项目管理界面中选择需要赋色的点云文件。
3\. 点击→按钮,弹出如图界面,选择影像文件以及点云文件。
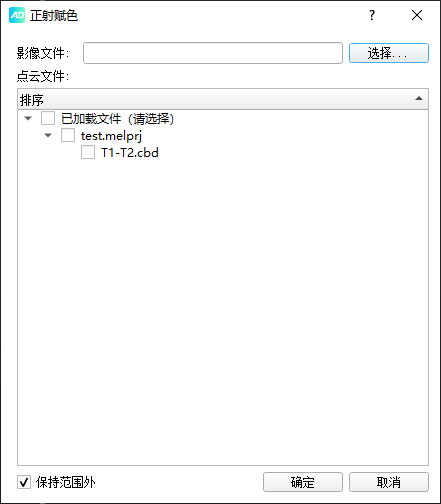
4\. 设置完成后点击→“确定”,运行处理。运行结束后,按颜色渲染点云进行查看(保持范围外:即不改变赋色范围外的本身颜色)。

正射影像示例

正射赋色后的激光点云示例

正射赋色后的激光点云示例
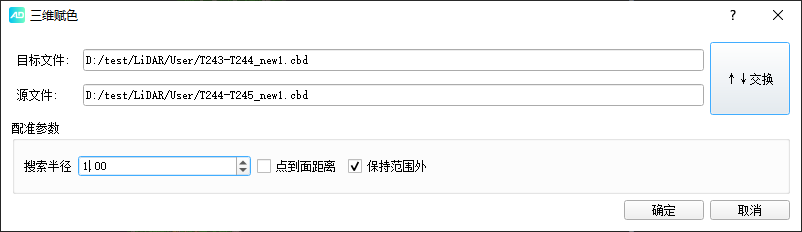
#### 三维赋色
功能:将测区的倾斜摄影测量点云通过点云配准的方式赋予激光点云。在获取CCD原始数据影像(中心投影影像)后,倾斜三维点云可以由三方软件制作。
**步骤**:
1\. 在资源项目管理界面中选择需要修改的点云文件和目标倾斜三维点云文件。
2\. 点击→按钮,弹出三维赋色界面,设置配准参数。
1. 设置完成后点击→“确定””,运行处理。运行结束后,按颜色渲染点云进行查看。
参数设置:
交换:交换目标文件和源文件数据。目标文件是带颜色的倾斜三维点云,源文件是待赋色的激光三维点云。
搜索半径:根据中心点搜索相应最近点点集的距离。当两点云偏差较大时,可适当增大搜索半径。
点到面距离:根据点到平面距离原则进行配准。

三维赋色后的激光点云示例
- 概况
- 安装与激活
- 软件安装
- 软件购买及激活方法
- 在线激活
- 加密狗激活
- 系统备份和恢复
- 用户登录
- 模块介绍
- 项目管理模块
- 工作空间
- 项目
- 添加文件
- 更改文件
- 加载点云
- 停止任务
- 析出数据
- 文件属性查看
- 选项
- 快捷操作
- 渲染模块
- 渲染模式
- 点云显示类型
- 轨迹显示类型
- 显示与定位
- 渲染设置
- 渲染视图
- 编辑模块
- 编辑模式
- 局部视图
- 扩展选择
- 选点类型
- 点操作
- 量测
- 保存编辑
- 控制点编辑
- 工具模块
- 重采样类型
- 按时间截取
- 数据分段
- 点云配准
- RGB更改
- 点云解析
- POS解算
- 精化模块
- 精化方法
- 结果查看
- 分类模块
- 分类方法
- 地物提取
- 电力模块
- 添加文件
- 杆塔标记
- 电力切档
- 补断点
- 精细分类
- 矢量化
- 电力分析
- 精细巡检
- 海量点云平台
- 视图模块
- 窗口视图
- 轨迹管理器
- 主题
- 附录