

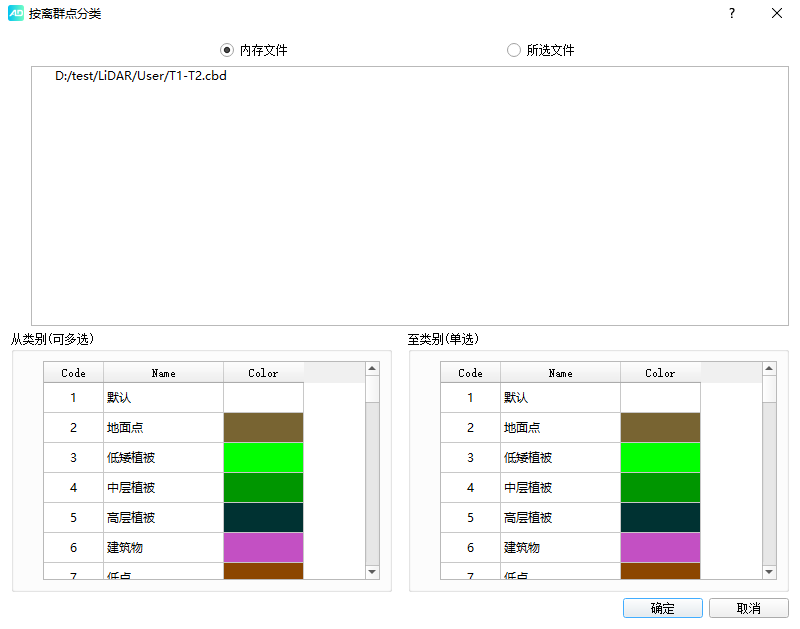
#### 按类别
**功能:**将已有类别的点云修改至另一类别。
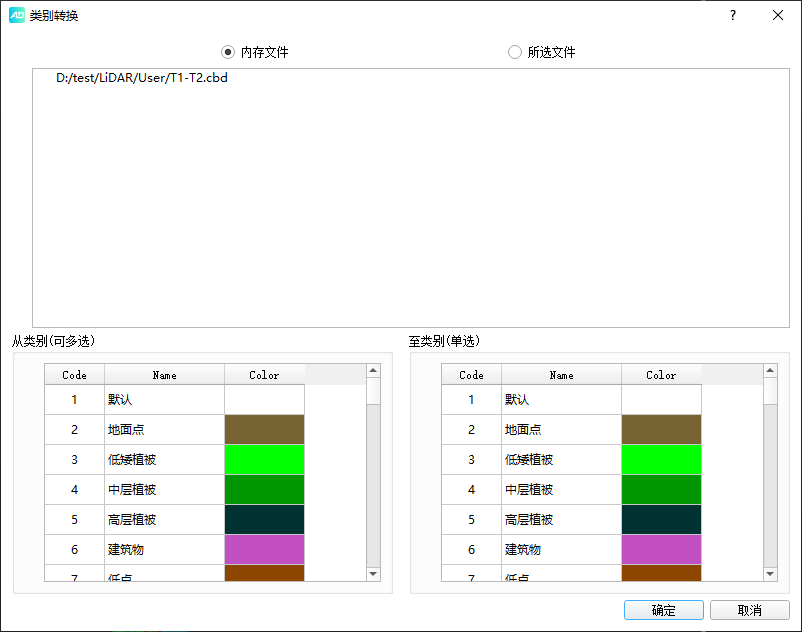
参数设置:
内存文件:在工程项目管理模块中使用 加载 功能后的文件数据,会显示在内存文件窗口中。
所选文件:在资源项目管理界面中选择的数据,会显示在所选文件窗口中。
从类别:待分类类别。
至类别:分类目标类别。
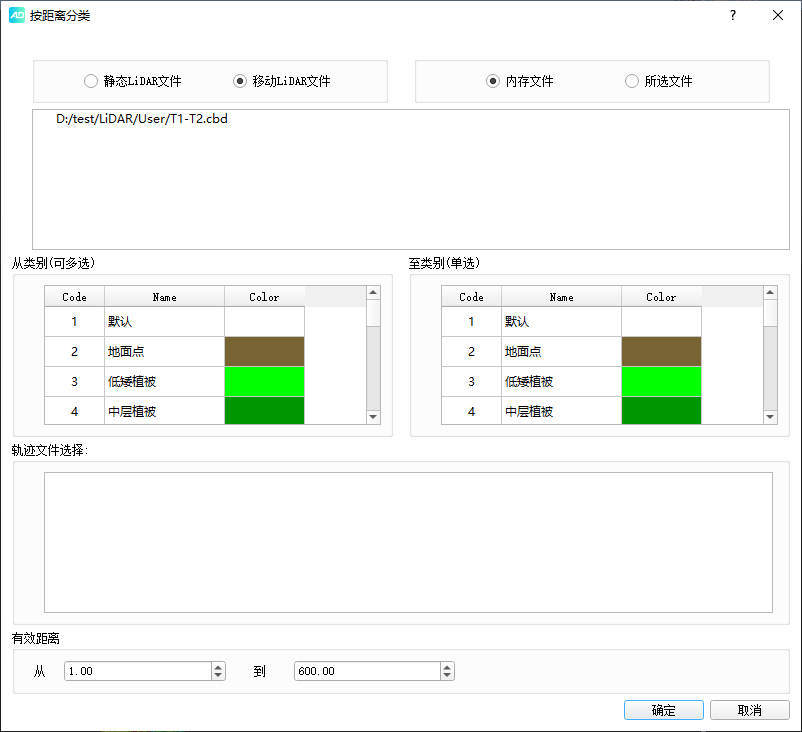
#### 按测距
**功能:**按点云距载体中心的距离进行分类。
参数设置:
内存文件:在工程项目管理模块中使用 加载 功能后的文件数据,会显示在内存文件窗口中。
所选文件:在资源项目管理界面中选择的数据,会显示在所选文件窗口中。
LiDAR文件可选择静态LiDAR文件以及移动LiDAR文件。
从类别:待分类类别。
至类别:分类目标类别。
静态LiDAR文件: 固定激光扫描仪获取的LiDAR文件。
移动LiDAR文件: 移动激光扫描仪获取的LiDAR文件。
有效距离:(默认从1m到600m)将在距视点设置距离范围内的点进行分类。
- 当选择为静态LiDAR文件时:
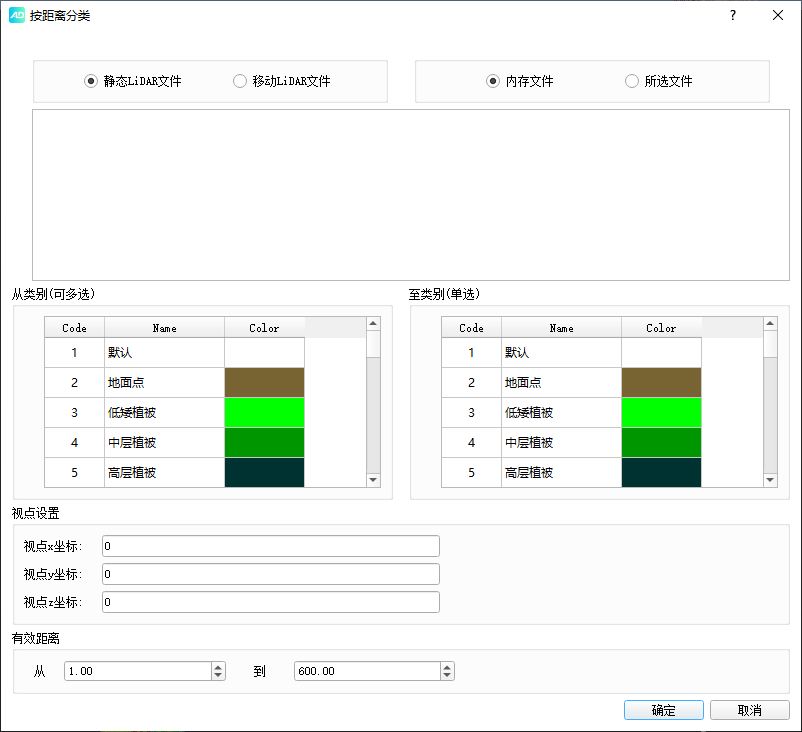
内存文件:在工程项目管理模块中使用 加载 功能后的文件数据,会显示在内存文件窗口中。
所选文件:在资源项目管理界面中选择的数据,会显示在所选文件窗口中。
从类别:待分类类别。
至类别:分类目标类别。
轨迹文件选择:需选择对应点云数据的轨迹文件。
视点设置:输入仪器所在点位x坐标、y坐标、z坐标。
有效距离:(默认从1m到600m)将在距视点设置距离范围内的点进行分类。

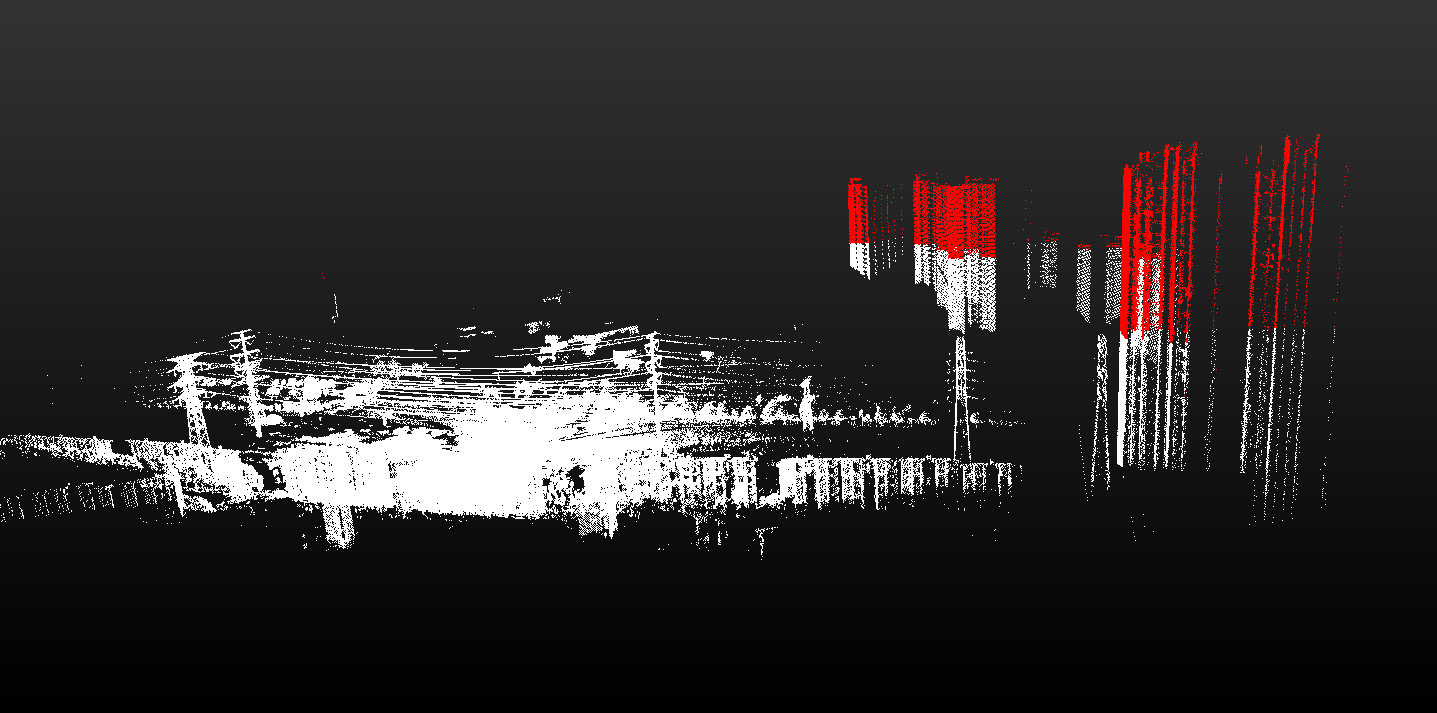
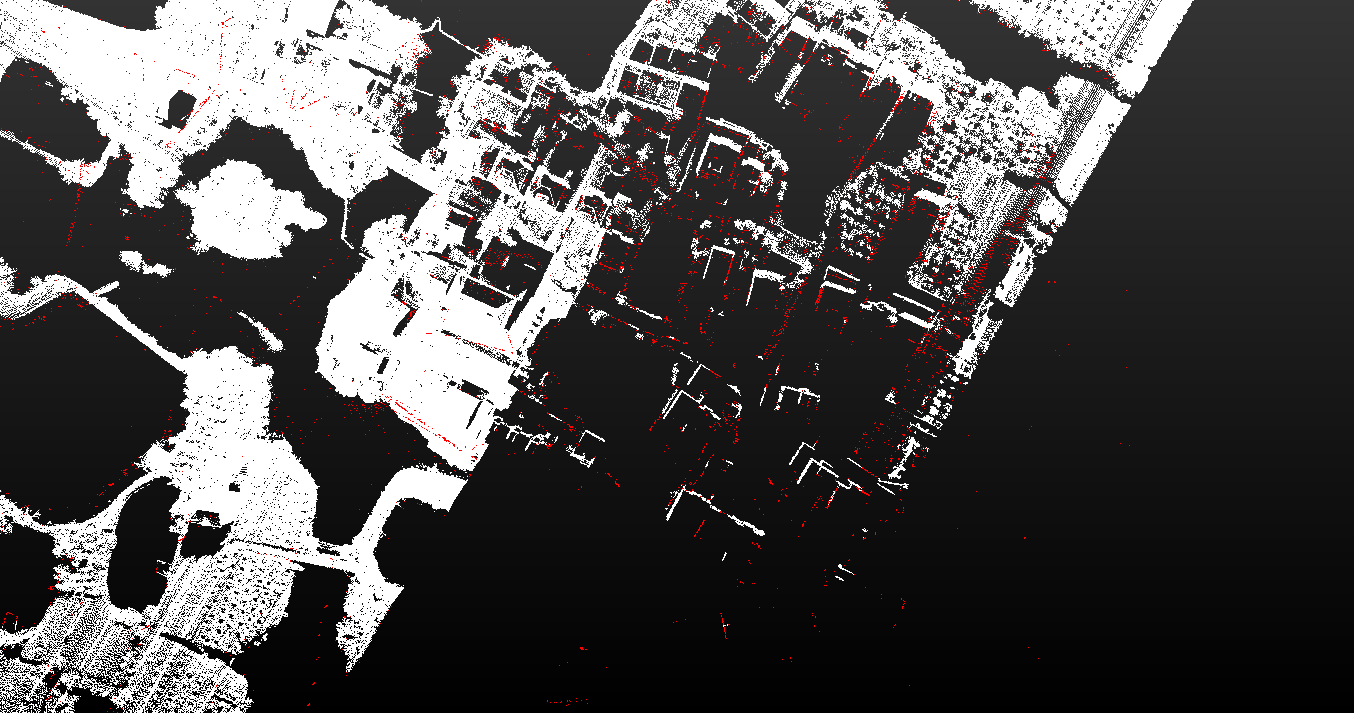
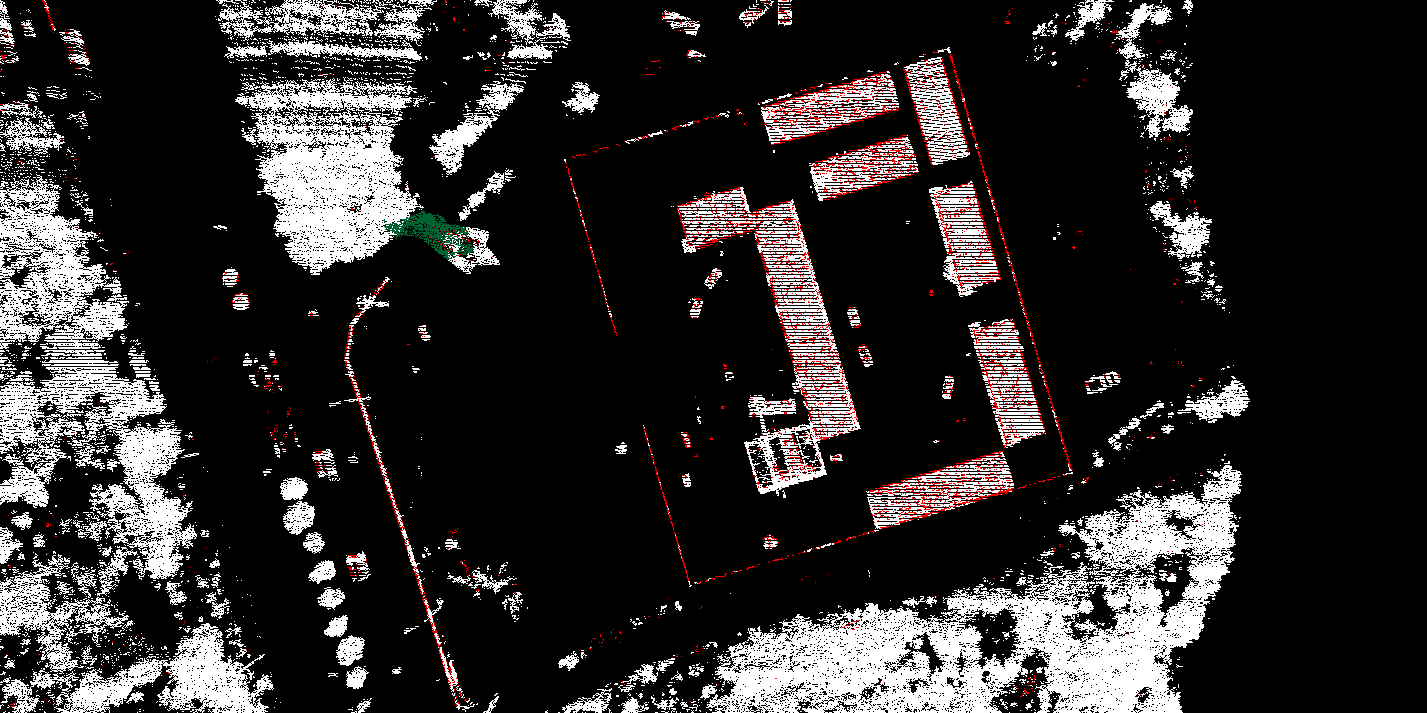
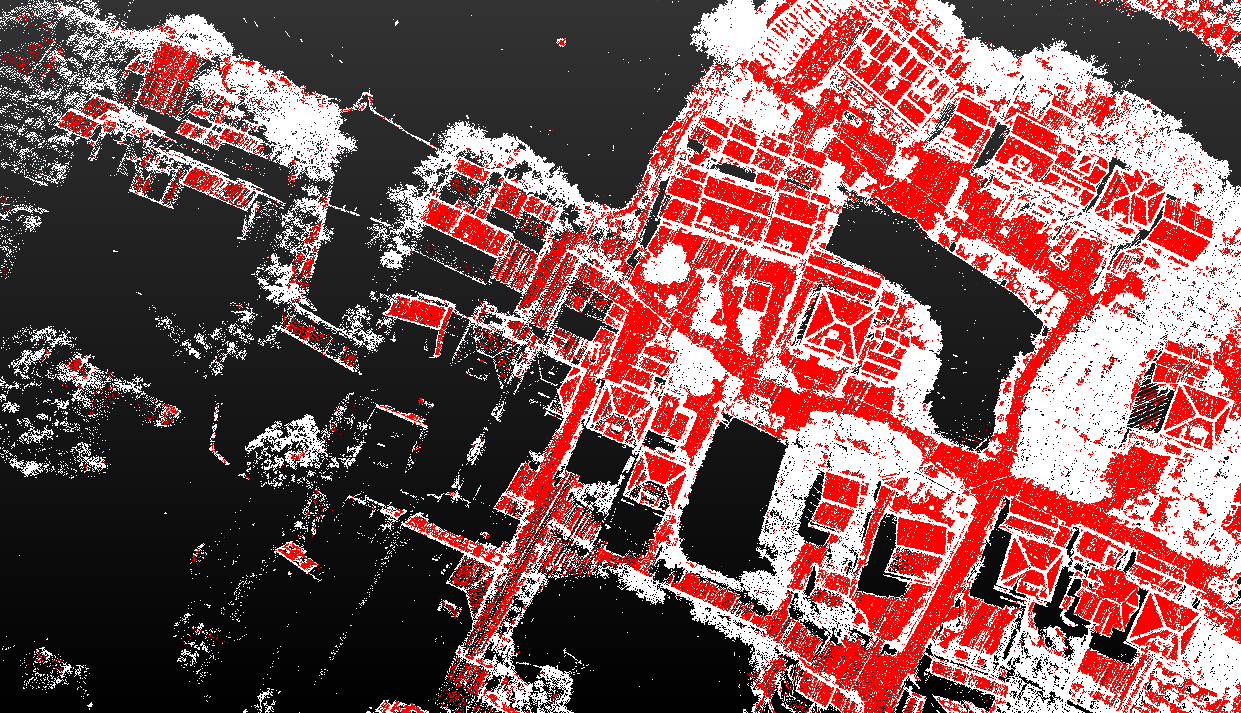
按距离分类,红色为有效距离外的点
- 当选择为移动LiDAR文件时:

内存文件:在工程项目管理模块中使用 加载 功能后的文件数据,会显示在内存文件窗口中。
所选文件:在资源项目管理界面中选择的数据,会显示在所选文件窗口中。
从类别:待分类类别。
至类别:分类目标类别。
轨迹文件选择:需选择对应点云数据的轨迹文件。
有效距离:(默认从1m到600m)将在距视点设置距离范围内的点进行分类。
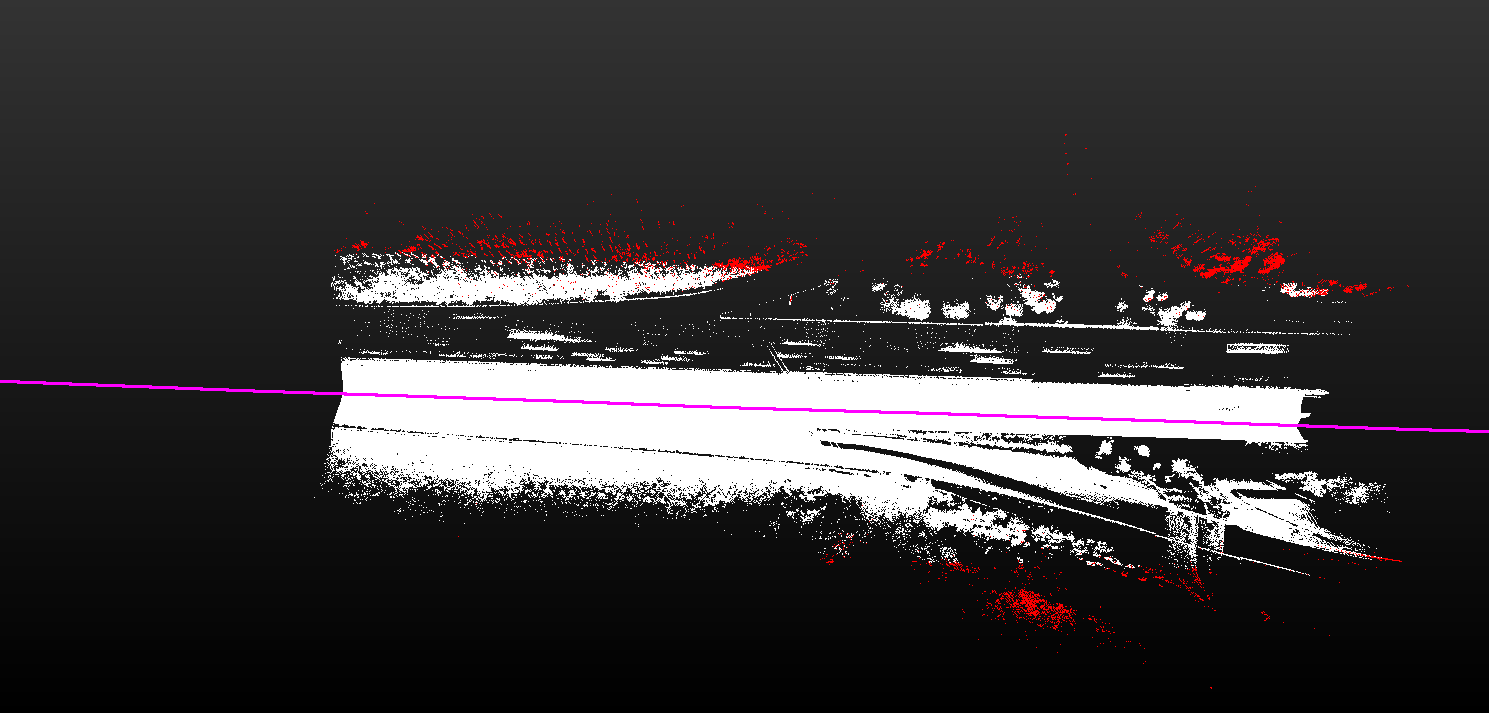
按距离分类,红色为有效距离外的点
#### 按高程
**功能:**通过设置点云高程阈值对点云进行分类。
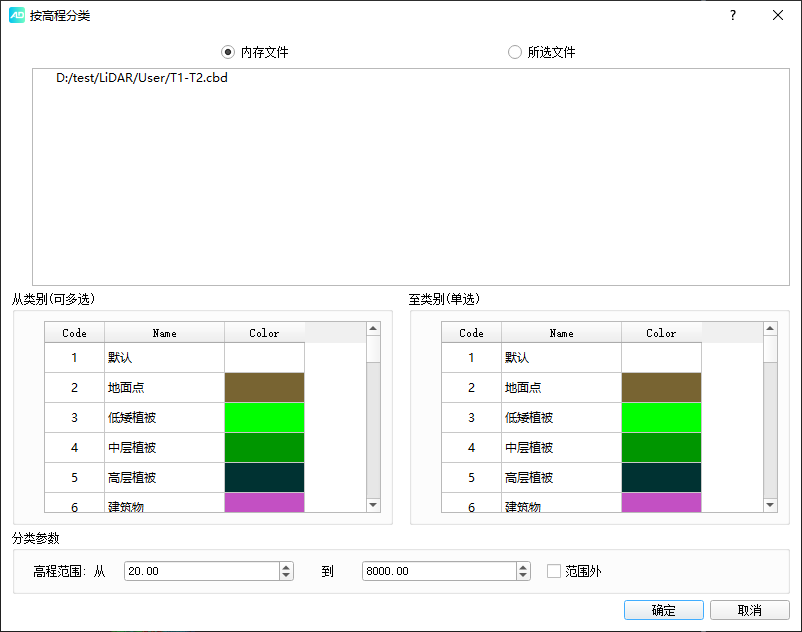
参数设置:
内存文件:在工程项目管理模块中使用 加载 功能后的文件数据,会显示在内存文件窗口中。
所选文件:在资源项目管理界面中选择的数据,会显示在所选文件窗口中。
从类别:待分类类别。
至类别:分类目标类别。
高程范围:(默认从20m到8000m)对高程范围内的点进行分类;勾选后,则是对所设置的高程范围之外的点云进行分类。
#### 按高差
通过设置高差阈值对点云进行分类。
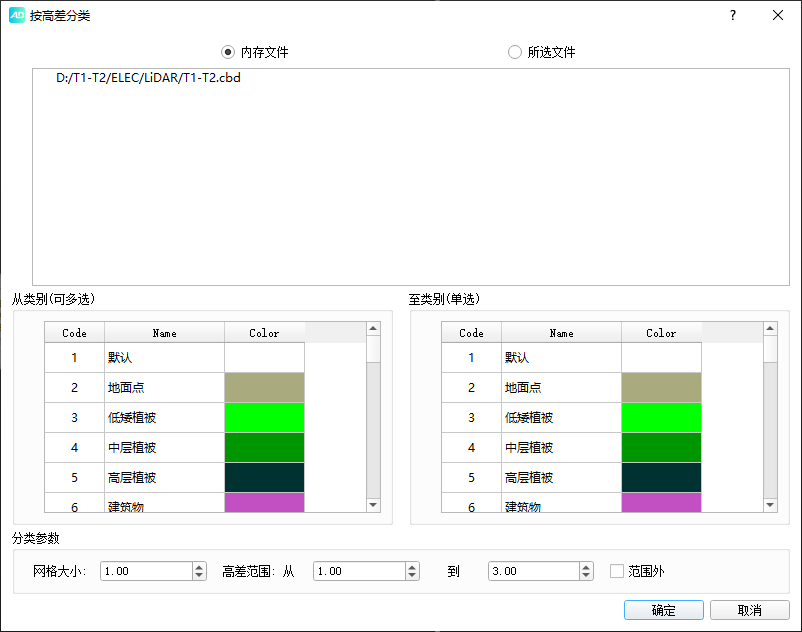
参数设置:
内存文件:在工程项目管理模块中使用 加载 功能后的文件数据,会显示在内存文件窗口中。
所选文件:在资源项目管理界面中选择的数据,会显示在所选文件窗口中。
从类别:待分类类别。
至类别:分类目标类别。
网格大小:所建立的二维格网区域大小,用于判断该区域的高差范围。
高差范围:计算网格内的高差阈值标准,若高差在此范围内,此格网内所有点云分类至目标类别(默认),勾选则对所在高差范围外的点进行分类。
#### 按强度
**功能:**通过设置点云强度阈值对点云进行分类。
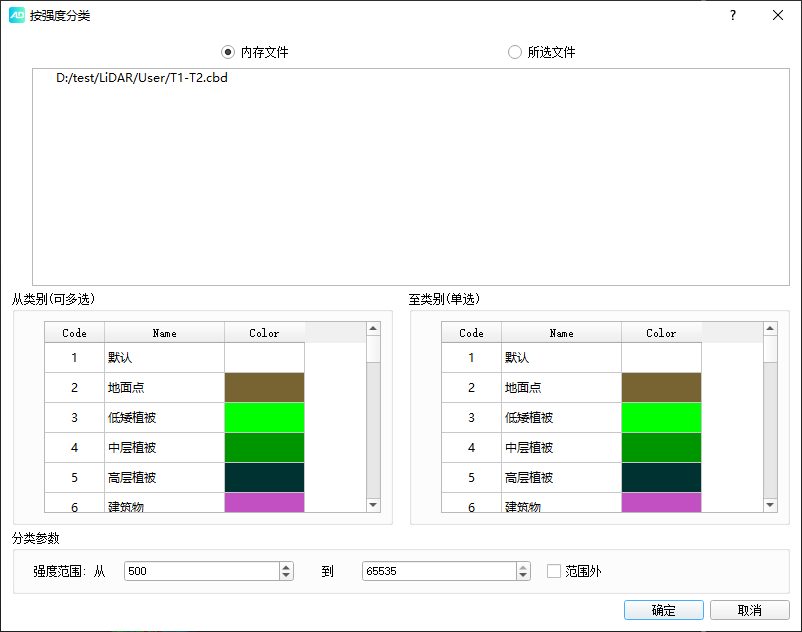
参数设置:
内存文件:在工程项目管理模块中使用 加载 功能后的文件数据,会显示在内存文件窗口中。
所选文件:在资源项目管理界面中选择的数据,会显示在所选文件窗口中。
从类别:待分类类别。
至类别:分类目标类别。
强度范围:(默认从“500”到“65535(最大值)”)对强度范围内的点进行分类;勾选后,则是对所设置的强度范围之外的点云进行分类。
#### 离群点检测
**功能:**可用于检测识别稀疏的噪点,通过统计学滤波算法,对稀疏离散的点云进行分类。
参数设置:
内存文件:在工程项目管理模块中使用 加载 功能后的文件数据,会显示在内存文件窗口中。
所选文件:在资源项目管理界面中选择的数据,会显示在所选文件窗口中。
从类别:待分类类别。
至类别:分类目标类别。
#### 按曲率
**功能:**可用于植被点云的分类。按照计算的曲率数值进行分类。
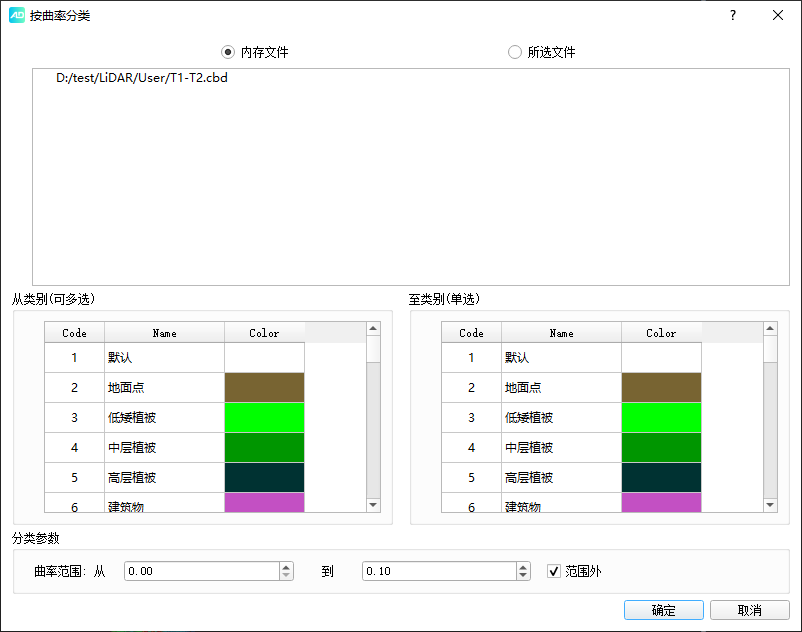
参数设置:
内存文件:在工程项目管理模块中使用 加载 功能后的文件数据,会显示在内存文件窗口中。
所选文件:在资源项目管理界面中选择的数据,会显示在所选文件窗口中。
从类别:待分类类别。
至类别:分类目标类别。
曲率范围:(默认从0.00到0.10,默认)对在曲率范围之外的点云进行分类;取消勾选则对所在曲率范围内的点进行分类。

#### 按线性度
**功能:**用于提取线状点云数据。通过计算点云线性度,按照计算的线性度数值进行分类。
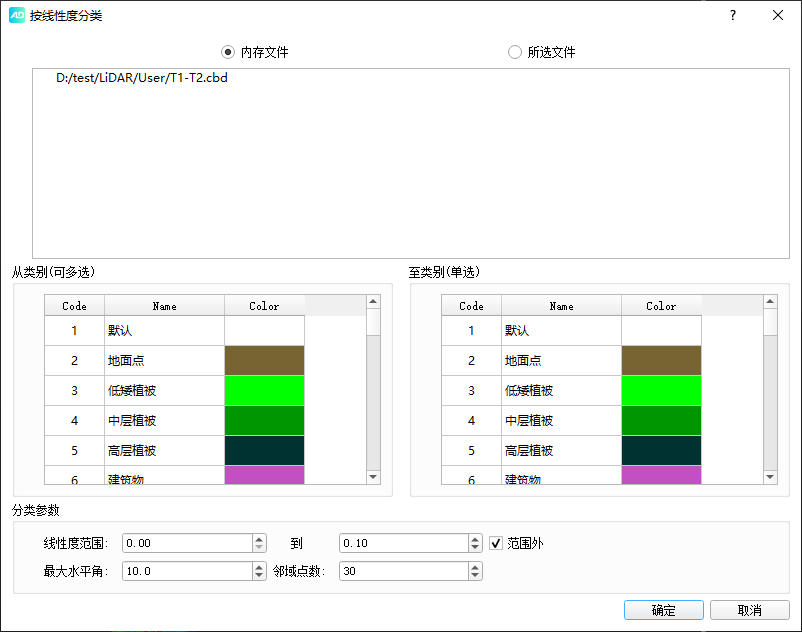
参数设置:
内存文件:在工程项目管理模块中使用 加载 功能后的文件数据,会显示在内存文件窗口中。
所选文件:在资源项目管理界面中选择的数据,会显示在所选文件窗口中。
从类别:待分类类别。
至类别:分类目标类别。
线性度范围:(默认从0.00到0.10,默认)对在线性度范围外的点云进行分类,取消勾选则对所在线性度范围内的点进行分类。
最大水平角:(默认10.0°)待提取线与水平面最大夹角,选取在此夹角范围内的点。
领域点数:(默认为30)判断待提取线最少点数,选取大于此点数的线。
#### 按平面度
**功能:**用于提取面状点云。遍历点云中的点,计算点云平面度,按照平面度数值进行分类。
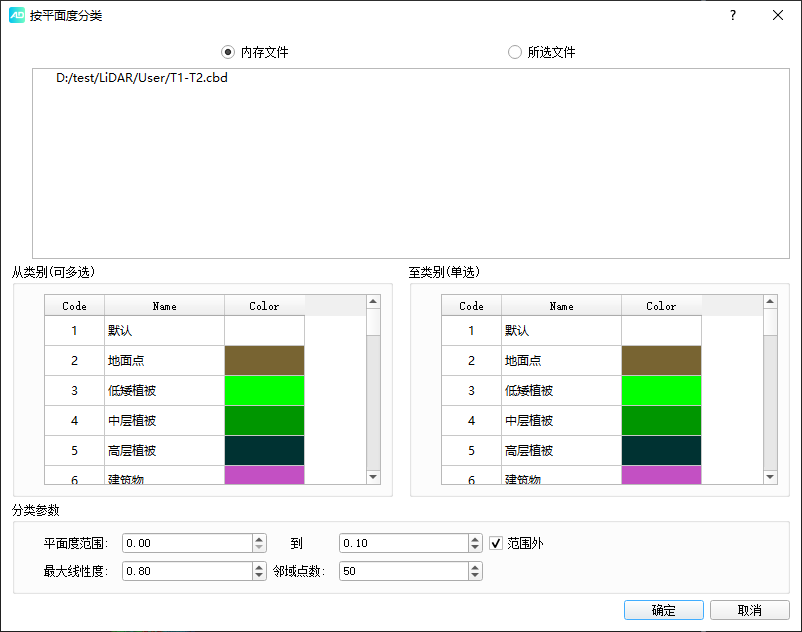
参数设置:
内存文件:在工程项目管理模块中使用 加载 功能后的文件数据,会显示在内存文件窗口中。
所选文件:在资源项目管理界面中选择的数据,会显示在所选文件窗口中。
从类别:待分类类别。
至类别:分类目标类别。
平面度范围:(默认范围从0.00到0.20,默认),对在平面度范围外的点云进行分类,取消勾选则对所在平面度范围内的点进行分类。
最大线性度:(默认0.40),对线性度小于最大线性度的平面进行分类
领域点数:判断待提取线最少点数,选取大于此点数的平面。
- 概况
- 安装与激活
- 软件安装
- 软件购买及激活方法
- 在线激活
- 加密狗激活
- 系统备份和恢复
- 用户登录
- 模块介绍
- 项目管理模块
- 工作空间
- 项目
- 添加文件
- 更改文件
- 加载点云
- 停止任务
- 析出数据
- 文件属性查看
- 选项
- 快捷操作
- 渲染模块
- 渲染模式
- 点云显示类型
- 轨迹显示类型
- 显示与定位
- 渲染设置
- 渲染视图
- 编辑模块
- 编辑模式
- 局部视图
- 扩展选择
- 选点类型
- 点操作
- 量测
- 保存编辑
- 控制点编辑
- 工具模块
- 重采样类型
- 按时间截取
- 数据分段
- 点云配准
- RGB更改
- 点云解析
- POS解算
- 精化模块
- 精化方法
- 结果查看
- 分类模块
- 分类方法
- 地物提取
- 电力模块
- 添加文件
- 杆塔标记
- 电力切档
- 补断点
- 精细分类
- 矢量化
- 电力分析
- 精细巡检
- 海量点云平台
- 视图模块
- 窗口视图
- 轨迹管理器
- 主题
- 附录