## 一、平台概述
:-: 
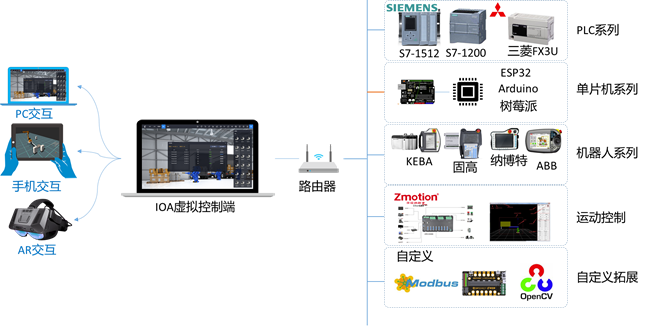
IOA综合实训平台是一套集成了,机器人、运动控制、嵌入式、物联网以及智能MES控制系统的一体化系统平台,该平台包含了几乎所有制造产线的功能单元模块及应用,涉及有多个专业学科的交叉应用,并且结合AR及VR的仿真能够实现沉浸式体验和教学展示应用;
该系统平台采用半实物 \+ 虚拟控制器 \+ 3D仿真方式,并且结合智能控制的MES系统,能够进行从智能工厂的从设备层、驱动层、控制层、管理层、应用层的五层架构所有环节的开发,并提供了100+课时教材,包含了从工业机器人、PLC等控制驱动技术,再到winCC、C#上位机控制,再到数据库B/S前后端开发最后到云部署及边缘计算,工业APP开发。
* 开放式智慧工厂综合实训台系统,配套工业机器人控制系统、西门子PLC、运动控制器、嵌入式物联网共计四种硬件控制系统;
* 配套开放式控制柜+实训台+组态液晶屏
* 支持工业互联网图形化+VB+C+组态语言硬件编程
* 配套全套工业互联网管理及控制应用的课程案例资源
* 1:1可编辑虚拟产线互动编程
* 开放式MES系统+100课时资源包
## 二、模块化控制系统
综合数字孪生实训平台包含了工业机器人、运动控制器以及工业物联网控制系统等多种控制单元,能够根据真实的智造产线完成各类复杂和综合的开发实训内容,内部配置的控制功能如下:
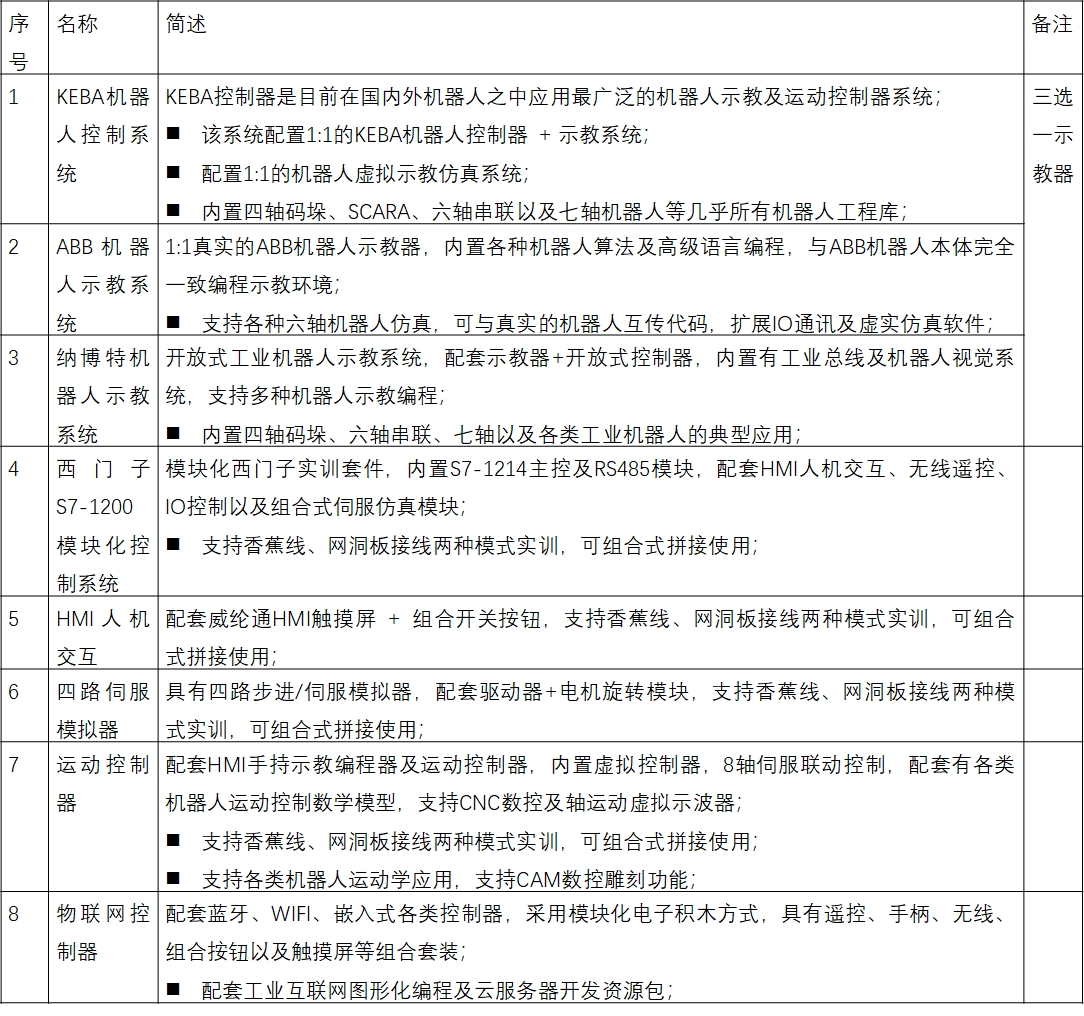
### 1、多种组合控制系统

### 2、核心模块说明

## 三、数字孪生机器人平台

## 1、平台概述
Mirobot机械臂并不是一套独立的机器人系统,通过与IOA数字孪生结合,**Mirobot****可实现1:1****的虚实孪生机器人应用与控制**,采用数字化仿真控制器以及3D虚拟工厂场景,可实现任意的工业机器人应用及创新应用,不仅仅是物理仿真更将机器人与智能控制应用、场景搭建、系统集成以及数字化控制全部融入在内,真正实现智能制造工业4.0教学的理实虚一体化教学创新应用;
通过与 **IOA数字孪生系统结合**,Mirobot机械臂不仅仅在机器人的典型应用工作站能够编程开发,更能够结合IOA数字孪生实现:
* 1:1的虚拟化仿真,自定义拖拽式的设计机器人工作站产线;
* 1:1的虚实孪生控制仿真;
* 与实体工作站对应,能够实现人手一机产业结合的仿真应用;
## 2、机器人特点
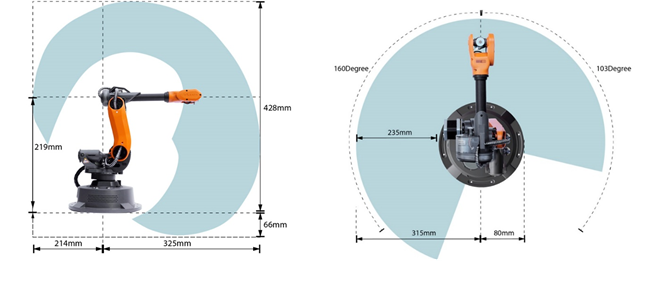

Mirobot机械臂是一款安全易用的迷你六轴桌面工业机器人,是一款开放式AI机器人综合教学平台。该机器人采用高精度伺服和步进驱动,采用1:1的仿生结构,机器人具有写字画画、激光雕刻、搬运码垛等多种功能,预留多个扩展接口支持二次开发,同时支持Python、C、C++、Java等编程语言。
机器人具有PC端软件、手机APP、蓝牙示教器多种控制方式,自由设定动作、任意添加夹具,满足不同应用和机器人学习开发的需求。
* 专业:高精度:Mirobot设计参考工业常用六轴机械臂原型,具备空间全向移动特点,致力于打造更真实的教学设备。采用先进的运动学算法,重复定位精度达0.2mm,满足实训研究精准执行。
* 人手一机:安全可靠:整机总重量仅1.5Kg,底盘直径160mm。一体化设计,体轻身小,让学生在课堂也能体验到实践的乐趣。
* 开源:可扩展:Mirobot作为首款迷你桌面级教育机械臂,为学生学习提供开源的运动学、视觉等算法。同时设备预留多个扩展接口,支持Python、C、C++、Java等多种编程语言,为学生学习创新提供全新的创新学习平台。
* **数字孪生:Mirobot 配置了1:1 的数字孪生仿真模型在IOA 之中,具有虚拟仿真 \+** **虚实仿真功能特点,能够采用虚拟 \+** **实体方式实现机器人本体 \+** **智能控制的数字孪生集成应用;**
## 四、配套工业互联网MES系统

IOA系统仿真具有一套开源的MES系统,从设备层、控制层、数据层、应用层都具有对应开发及实践内容,通过PLC + 机器人 +计算机软件的模式提供一套完整的数字化产线的,建设、编程、电气再到上层控制的综合型开发平台。
IOA虚拟仿真按照实验室已有的真实化产线可1:1搭建虚拟化系统,并配套完整的从认知到产线应用的阶段化开发课程资源,全面详细的介绍了数字化产线构成以及集成方式,并通过虚拟仿真技术创建与真实完全一致的虚拟产线,直接进行虚拟仿真调试。特色在于,通过将PLC、工业机器人、计算机软件控制技术结合,分单元分层讲解数字化产线的各个层级个功能的实施及编程控制方法,并能够以虚拟仿真加以展示及实现;
