
## 1、什么是Py-Tech编辑器
Py-Teach是一款基于Blcokly及Python编程的虚拟控制器,它可以设置为多种类型控制器,用来进行各种机器人和逻辑控制。
| 名称 | 特点 |视频 |
| --- | --- |--- |
| Py-M8 | 具有八个电机的自由控制器,用来控制移动机器人或一些自定义的传感机电类型。 |链接 |
| Py-S4 | 四轴SCARA机器人控制器,用来圆柱形坐标机器人。 |链接 |
| Py-R4 | 四轴码垛型控制器,用来控制码垛机器人编程。 |链接 |
| Py-R6 | 经典六轴机器人控制器,用来编程机器人示教动作。 |链接 |
**Py-Tech编辑器下载**
链接:https://pan.baidu.com/s/1A-whwM-J9PogwogvyJjTrw
提取码:1234
**注意**将下载下来的压缩文件解压到**英文**目录下;
## 2、认识Py-Tech控制器
双击“PyTeach/Py-Teach.exe”,打开Py-Tech编辑器。
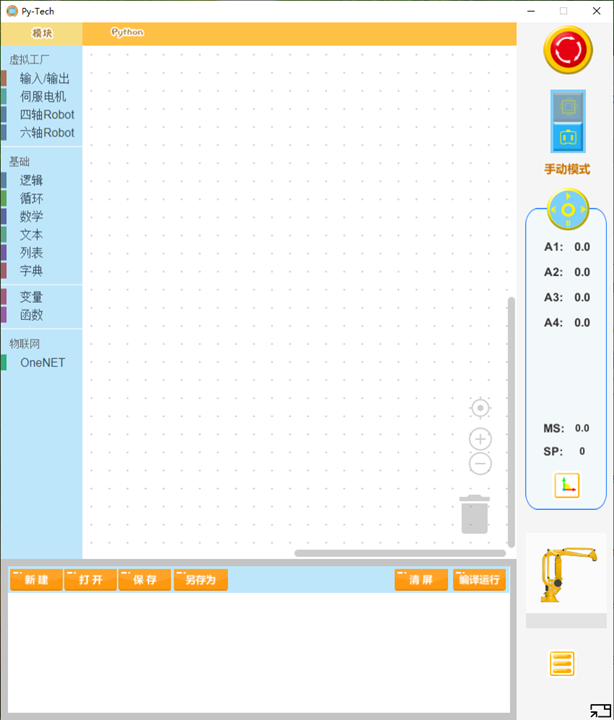
Py-Teach编辑器。分为“图形化程序选择区”,“图形化程序编辑区”,“系统功能区”,“消息提示区”,“机械臂操作区”,“菜单”,“代码预览区”等区域。

点击左上角,可以将“图形化程序编辑区”切换为“代码预览区”
在“代码预览区”中展示了图形化程序生成的python代码。
## 3、Py-Teach控制器基础使用
***
**新建python编程:**
点击[**新建**] 按钮即可新建python工程。
***
**打开python编程:**
点击保存好的工程文件,文件扩展名.xml。
***
**保存和另存为:**
点击保存或另存为图形化编程文件,扩展名为xml。
***
**编译运行:**
点击按钮,编译并运行python程序代码。
下方信息栏会输出打印的文本信息
**急停:**
点击按钮,可以停止示教器的控制输出。
**手动/自动:**
点击,在手动模式与自动之间切换。松动模式下,可以通过示教器窗口,手动控制机械手动作。自动模式下,可以通过图形化编写的Python控制机器人动作。
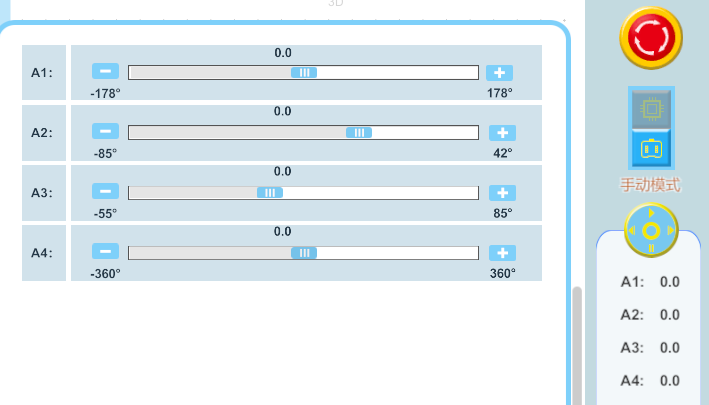
**摇杆**
手动模式下点击,打开摇杆控制窗口,在该窗口下手动操作机械手:
**设置菜单**
点击打开示教器菜单,

**设置菜单-机器人设置**中,可以设置Py-Tech控制器的机器人类型和型号。Py-Tech的机器人类型和型号列表如下:
| 机器人类型 | 控制器类型 | 机器人型号 |
| ------------ | ---------- | -------------- |
| 四轴码垛坐标 | Py-R4 | 130KG码垛机 |
| 四轴码垛坐标 | Py-R4 | 15KG码垛机 |
| 四轴码垛坐标 | Py-R4 | Dobot码垛机 |
| 四轴圆柱坐标 | Py-S4 | 060圆柱机械臂 |
| 四轴圆柱坐标 | Py-S4 | 600圆柱机械臂 |
| 四轴圆柱坐标 | Py-S4 | 1000圆柱机械臂 |
| P8远动控制器 | Py-M8 | 八轴控制器 |
| 六轴机器人 | Py-R6 | 开塔MiRobot |
网络地址为IOA的IP地址,本地IP为“127.0.0.1”,端口号默认“8502”。
使用多个Py-Tech控制器连接到IOA时,每个控制器配置不同的“控制器ID”,方便IOA区分每个控制器。
**设置菜单-IO控制**中,可以监控DI,DO,F32输入,F32输出。手动的控制DI和F32输入值
**设置菜单**-**Modbus通讯**和**Modbus寄存器**通过ModBusTCP协议与其他控制器进行通讯,读取寄存器数据。
- 欢迎使用IOA数字孪生
- IOA-更新与安装
- 软件注册与安装
- 软件使用协议
- 注册与使用
- (一)、认识IOA基础界面功能
- UI界面与设置
- 软件环境设置
- 三维导航操作
- 3D导航球使用
- 快捷键与仿真
- (二)、三维场景搭建
- 3D设计视频教程
- 坐标及旋转
- 模型参数设置
- 模型树与拼接
- 从SolidWorks到IOA放置的模型自制
- IOA辅助工具
- (三)、虚拟电气与调试
- 虚拟电气信号归类
- 虚拟接线与导出
- (三)、虚实控制与编程
- 西门子PLC的仿真与控制
- 西门子实体PLCS7-1214控制器的添加与控制
- 西门子虚拟PLCS7-1214控制器的添加
- 西门子PLCS7-1512控制器的添加
- 三菱PLC的仿真与控制
- 三菱PLC仿真器的使用说明
- 三菱PLC的添加与说明
- 工业机器人(纳博特)仿真
- 工业机器人(KEBA)仿真
- 工业机器人(埃夫特)仿真
- 协作机器人(遨博)仿真
- 运动控制(ZMC308)正运动仿真
- 机器视觉(VPLC516)正运动仿真
- 微型机器人(开塔)仿真
- Py-teach快速编程仿真
- 人工智能视觉仿真
- 单片机接入与仿真控制
- Mixly-UNO_S虚拟工厂SDK
- Mixly-MEGA_S虚拟工厂SDK
- Mixly-ESP32虚拟工厂SDK
- 树莓派与Python仿真
- (四)、自定义控制器添加
- modbus-tcp自定义控制器
- (五)、Py-teach模块化编程示教
- Py-teach软件使用
- 语法与编程
- py-teach快速编程在线教程
- (六)、SDK与二次开发
- modbus-tcp自定义控制器SDK
- 机器视觉开发SDK
- EAIDK-610固件烧录手册
- EAIDK-610快速上手手册
- EAIDK-610案例使用手册
- (七)、快速上手案例教程
- 西门子PLC虚实仿真公开课
- 纳博特工业机器人虚实仿真
- 三菱PLC虚实仿真
- (八)、XR多人互动
- (九)、问题归总
- (十)、IOA硬件虚实仿真导航
- IOA虚实控制器及案例下载
- 虚实控制器资源包
- 机器视觉与人工智能