
[TOC]
## **1、软件及工程下载**
## **教程视频**
<iframe src="//player.bilibili.com/player.html?aid=937530818&bvid=BV1nT4y1i7Fc&cid=556688859&page=1" scrolling="no" border="0" frameborder="no" framespacing="0" allowfullscreen="true" width="670px" height="442px" > </iframe>
>AUBO控制器软件下载地址[链接](https://pan.baidu.com/s/1VBMlFKagURl2TlsuhRXkIg) 提取码:3937
>AUBO虚拟机软件下载地址[链接](https://pan.baidu.com/s/1IMxewbIySBOi87x7IeTXzw) 提取码:2bkg
******
## 2、**虚拟机安装说明**
1、确保软件安装包,已经成功下载到电脑上,选择,进行安装。
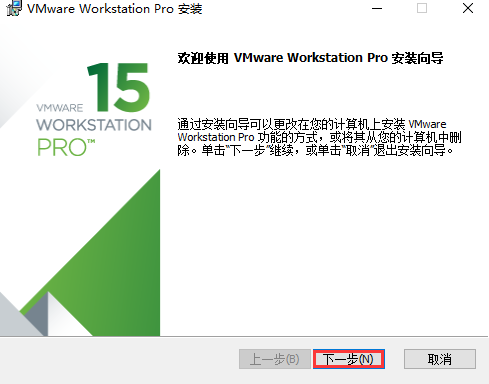
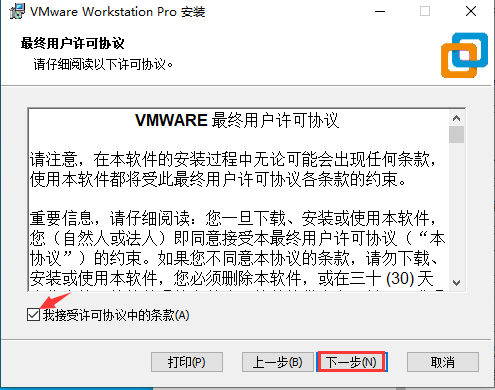
2、在首个安装界面,直接点下一步,勾选接受协议,再点下一步。
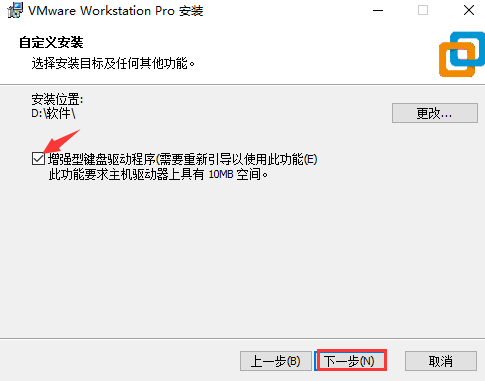
3、用户可以按需修改软件安装位置,勾选“增强型键盘驱动程序”,点击下一步。
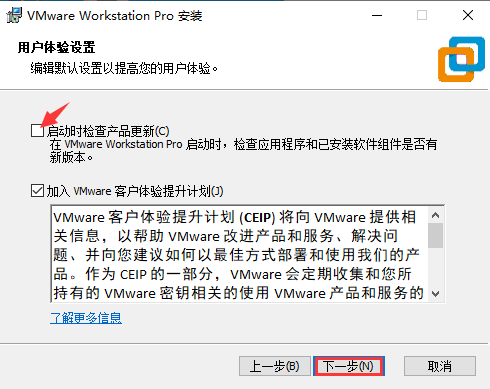
4、取消勾选“启动时检查产品更新”和“加入客户体验提升计划”,再点下一步。
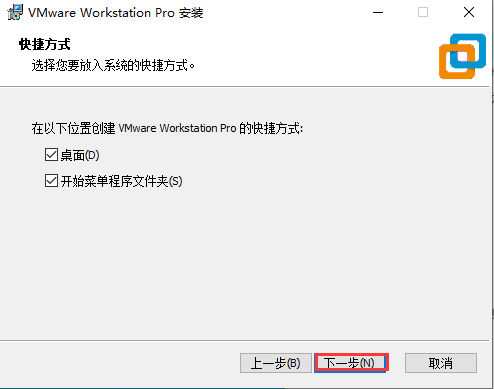
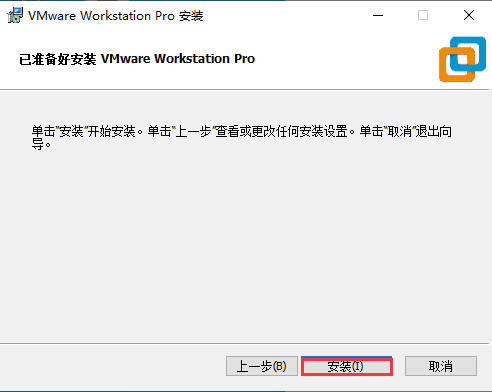
5、在快捷方式界面,直接点下一步,最后选择底部的“安装”即可。
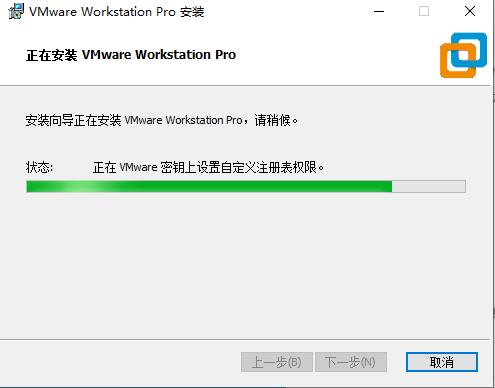
6、VMware Workstation 软件会自动开始安装,并显示安装进度。
7、安装完成后,打开虚拟机再打开VM序列号,选择其中一个填入即可正常使用。

## 3、**软件模拟仿真**
虚拟机开启步骤说明点击[链接](https://www.bilibili.com/video/BV1Bh411e7Ci/)
AUBO连接IOA步骤说明点击[链接](https://www.bilibili.com/video/BV1HU4y157ND/)
**1、** **说明**
1. 傲博需要控制器需要用到Linux系统,所有我们创建一个虚拟机来对傲博机器人进行示教控制
2. 控制器的IP地址要和网络连接中虚拟机创建的网络IP地址处于同一个网端
**2、** **如何使用**
1. 打开虚拟机之后点击进入控制台,输入指令 “**ifconfig**”可以查看到控制器的ip地址如下图

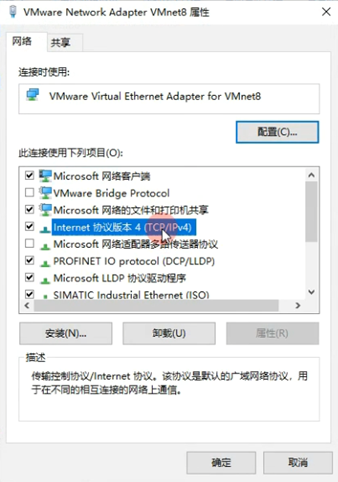
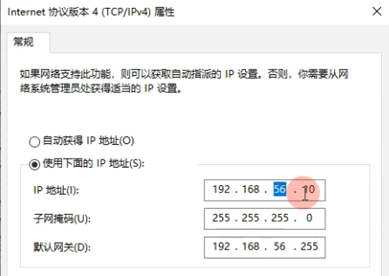
2. 之后打开网卡查看由虚拟机创建的网卡的ip地址确认二者是否处于同一网端
3. 右键点击属性打开Internet协议版本4(TCP/IPV4)查看虚拟机网卡地址
4. 确认地址一致后进入傲博控制器密码为1,输入后即可进入
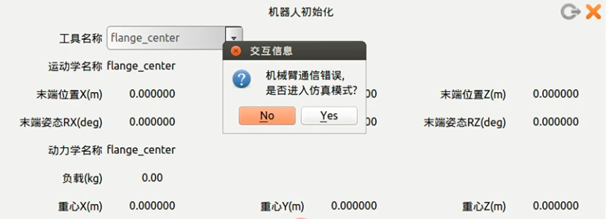
5. 进入选择保存后会出现一个弹窗直接点击Yes进入仿真模式
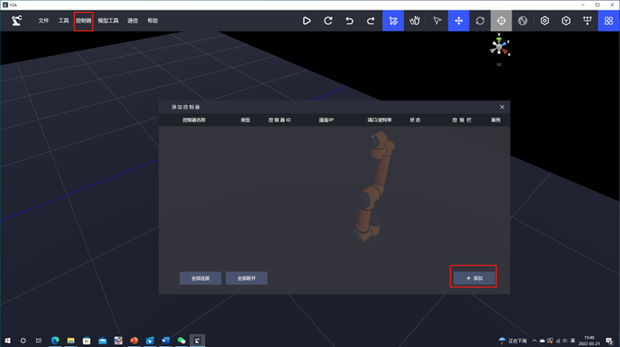
6. 进入IOA打开左上角的模型库选择分类中的机器人以拖拽的方式将一个傲博机器人放置到场景中

7. 添加控制器中控制器类别选择工业机器人,型号为AUBO_R6

8. IOA中控制器的ip地址为傲博控制器的ip地址,端口号为502

9. 配置虚拟电气接线第一步先打开显示控制,第二步点击左侧长方块进入虚拟接线页面第三步以拖拽的方式将R6机械臂接口接入模拟控制中
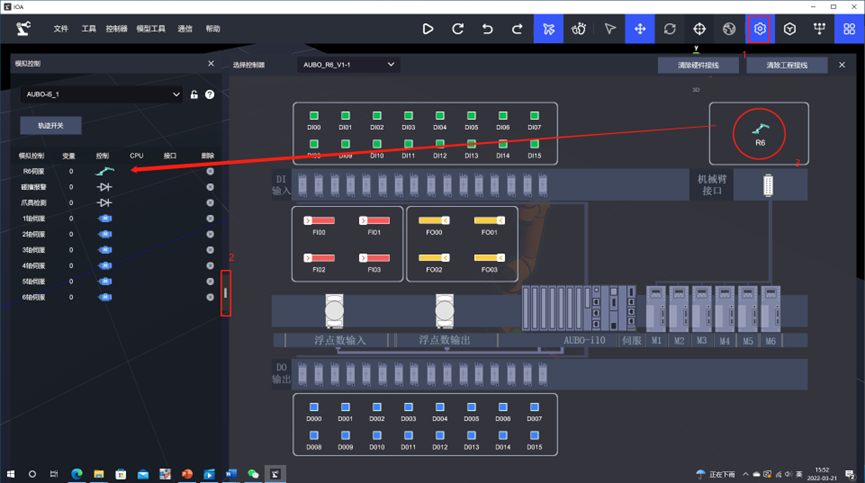
10. 完成上述步骤后即可通过虚拟机中的傲博控制器来控制IOA场景中的机器人
- 欢迎使用IOA数字孪生
- IOA-更新与安装
- 软件注册与安装
- 软件使用协议
- 注册与使用
- (一)、认识IOA基础界面功能
- UI界面与设置
- 软件环境设置
- 三维导航操作
- 3D导航球使用
- 快捷键与仿真
- (二)、三维场景搭建
- 3D设计视频教程
- 坐标及旋转
- 模型参数设置
- 模型树与拼接
- 从SolidWorks到IOA放置的模型自制
- IOA辅助工具
- (三)、虚拟电气与调试
- 虚拟电气信号归类
- 虚拟接线与导出
- (三)、虚实控制与编程
- 西门子PLC的仿真与控制
- 西门子实体PLCS7-1214控制器的添加与控制
- 西门子虚拟PLCS7-1214控制器的添加
- 西门子PLCS7-1512控制器的添加
- 三菱PLC的仿真与控制
- 三菱PLC仿真器的使用说明
- 三菱PLC的添加与说明
- 工业机器人(纳博特)仿真
- 工业机器人(KEBA)仿真
- 工业机器人(埃夫特)仿真
- 协作机器人(遨博)仿真
- 运动控制(ZMC308)正运动仿真
- 机器视觉(VPLC516)正运动仿真
- 微型机器人(开塔)仿真
- Py-teach快速编程仿真
- 人工智能视觉仿真
- 单片机接入与仿真控制
- Mixly-UNO_S虚拟工厂SDK
- Mixly-MEGA_S虚拟工厂SDK
- Mixly-ESP32虚拟工厂SDK
- 树莓派与Python仿真
- (四)、自定义控制器添加
- modbus-tcp自定义控制器
- (五)、Py-teach模块化编程示教
- Py-teach软件使用
- 语法与编程
- py-teach快速编程在线教程
- (六)、SDK与二次开发
- modbus-tcp自定义控制器SDK
- 机器视觉开发SDK
- EAIDK-610固件烧录手册
- EAIDK-610快速上手手册
- EAIDK-610案例使用手册
- (七)、快速上手案例教程
- 西门子PLC虚实仿真公开课
- 纳博特工业机器人虚实仿真
- 三菱PLC虚实仿真
- (八)、XR多人互动
- (九)、问题归总
- (十)、IOA硬件虚实仿真导航
- IOA虚实控制器及案例下载
- 虚实控制器资源包
- 机器视觉与人工智能