[TOC]
## **1.概念**
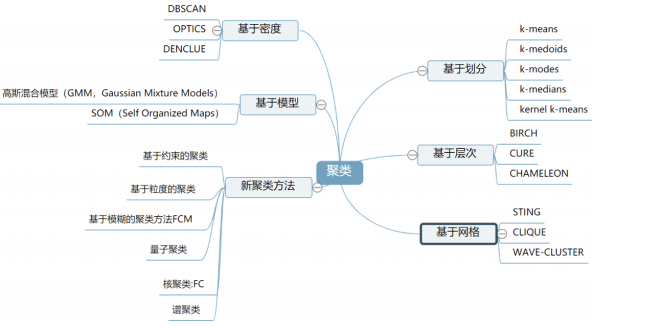
聚类(Clustering)分析是依据物以类聚的原理,将没有类别的对象根据对象的特征自动聚集成不同簇的过程,使得属于同一个簇的对象之间要尽可能非常相似,属于不同簇的对象之间要尽可能不相似(簇内相似度高,簇间相似度低)。
聚类算法需要注意的地方:
* 距离/相似度的度量
* 数据的标准化
## **2.聚类的评估**
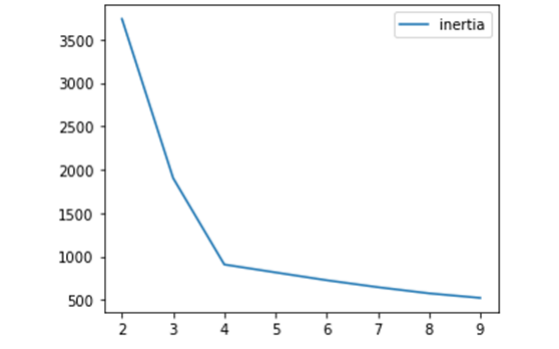
* 簇内平方和(Inertia)
* 属性Inertia_
* 轮廓系数
* silhouette_score
* silhouette_score
* 卡林斯基-哈拉巴斯指数
* calinski_harabasz_score
## **3.基于划分的聚类**
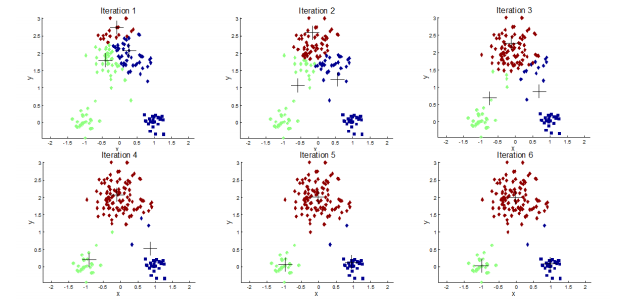
### **1)K-means算法步骤**
### **2)K-means缺点**
* 需要预先设定K值,对最先的K个点选取很敏感
* 对噪声和离群值非常敏感
* 只适合对数值型数据聚类
* 不能解决非凸(non-convex)数据
### **3) K-means改进**
* k-means对初始值的设置很敏感,所以有了k-means++、intelligent k-means、genetic kmeans。
* k-means对噪声和离群值非常敏感,所以有了k-medoids和k-medians。
* k-means只用于numerical类型数据,不适用于categorical类型数据,所以k-modes。
* k-means不能解决非凸(non-convex)数据,所以有了kernel k-means。
* K值的选择:**肘点法**
## **4.基于层次的聚类**
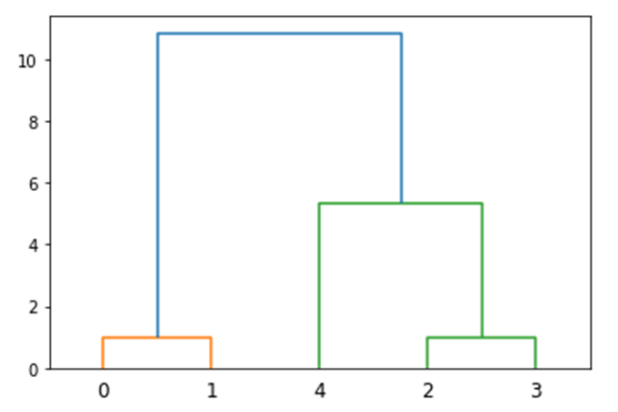
层次聚类(hierarchical clustering)方法将数据对象组成一棵聚类树
* 分裂法
* 凝聚法
### **1)凝聚法的步骤**
1. 计算各数据间的相似度矩阵
2. 每个数据就是一个簇
3. Repeat。
4. 合并两个最相似的簇形成新簇
5. 更新相似度矩阵
6. Until只剩一个类簇
### **2)簇间相似度的度量**
* MIN(单连接)
* MAX(全连接)
* Group Average(组平均)
* Distance Between Centroids(质心距离)
### **3)cluster.AgglomerativeClustering**
## **5.基于密度聚类**
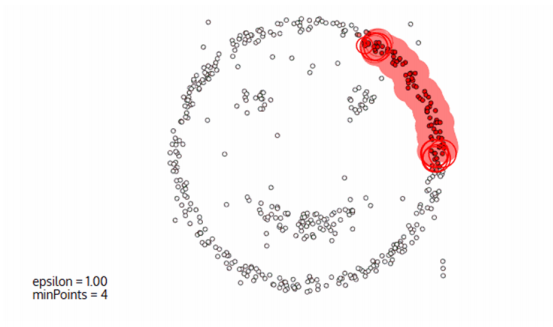
**DBSCAN**(Density-Based Spatial Clustering of Applications with Noise,具有噪声的基于密度的聚类方法)是一种基于密度的空间聚类算法。该算法将具有足够密度的区域划分为簇,并在具有噪声的空间数据库中发现任意形状的簇,它将簇定义为密度相连的点的最大集合。
### **1)概念**
* ϵ-领域:点x的ϵ-领域是以该对象为中心,ϵ为半径的空间,ϵ-领域可以写成NEps(x):NEps(x) : {y belongs to D | dist(y,x) <= Eps}
* 密度:特定半径内(Eps)数据点的数量
* 核心点(Core Point): 用户指定一个参数MinPts,即指定稠密区域的密度阈值。如果一个点的ϵ-领域至少包含MinPts个点,则称该点为核心点
* 边界点(Border point):对于点p,如果它的ϵ-领域内包含的点少于MinPts个,但落在某个核心点的ϵ-领域内,则称点p为边界点
* 噪声点(Noise):既不是核心点又不是边界点的任何点
### **2)优点**
* 发现任意形状的聚类
* 处理噪音
### **3)缺点**
* 参数难以确定
* 效果不佳:
* 密度不均
* 高维数据
### **4)cluster.DBSCAN**
