[TOC]
## 1. PID是什么?
PID是一种**控制**理论,是最常见,应用最广泛的自动反馈系统。
## 2. PID的组成
PID由三部分组成,分别是P-比例、I-积分、D-微分。
## 3. PID的作用
PID控制系统就是用来消除系统误差,让系统的输出值达到系统的期望值。
最简单的PID控制规律的表达式如式(3-1),它的框图如图3-1。
:-: 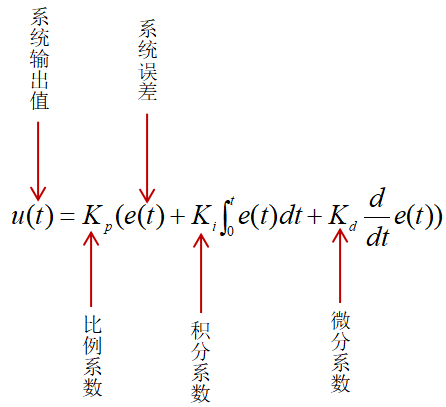
式(3-1)
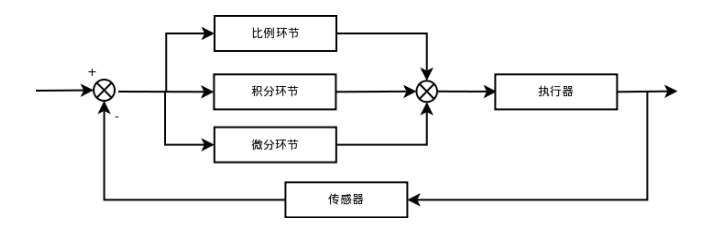
图 3-1 最简单的PID框图
PID的三个环节的作用分别如下:
**(1)P-比例环节:** 控制系统响应的快慢,比例越大,响应越快,缺点是存在静态误差,这个静态误差交给**I-积分环节**来解决。
**(2)I-积分环节:** 作用是:消除静态误差。所谓静态误差,就是系统稳定后输出值和设定值之间的差值,积分环节实际上就是偏差累计的过程,把累计的误差加到原有系统上以抵消系统造成的静态误差。
**(3)D-微分环节:** 作用是:反应偏差信号的变化规律,或者说是变化趋势,根据偏差信号的变化趋势来进行超前调节,从而增加了系统的快速性。
