对于PX4的数据处理流程可以简单看做如图4-1:
:-: 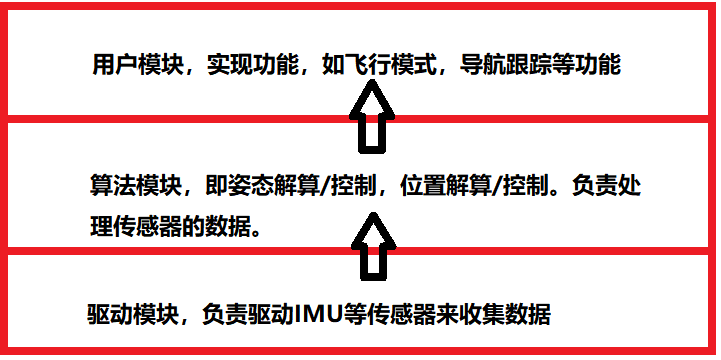
图 4-1
将上图细分后,PX4的数据处理流程如图4-2,
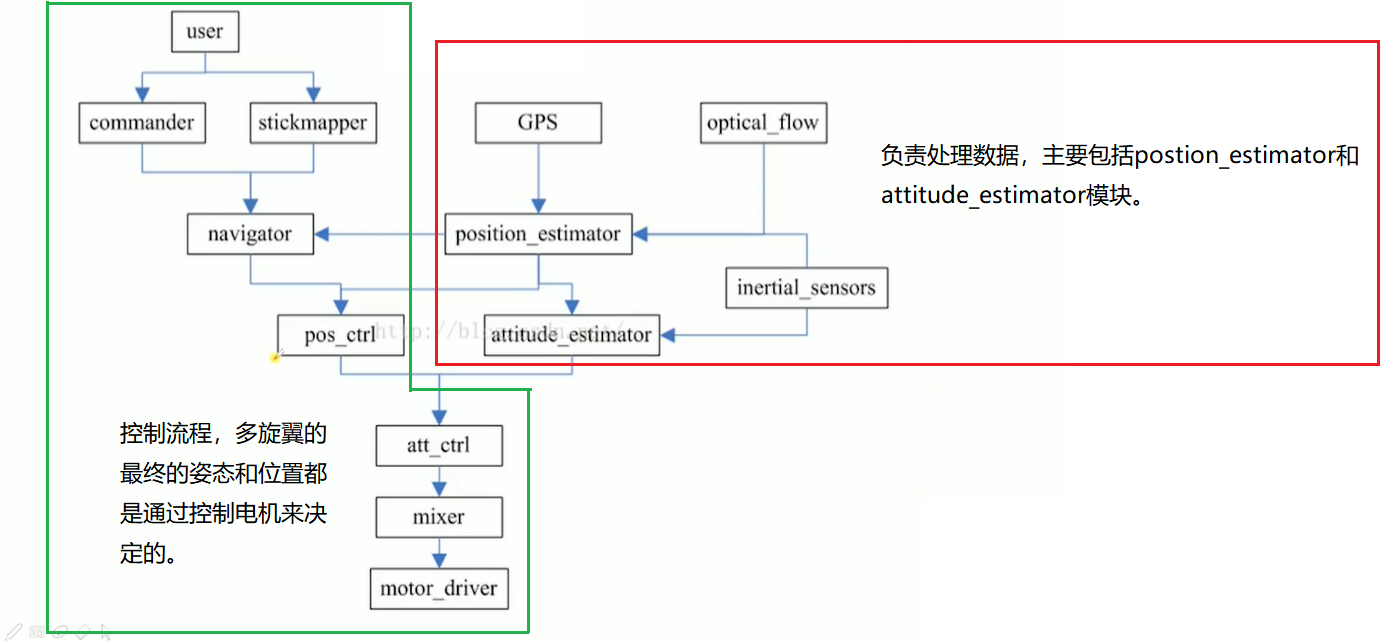
:-: 图4-2 PX的数据处理流程
* user:用户
* commander:模式切换,它会判断目前的传感器是否支持一些飞行模式。
* navigator:确定飞行模式后,决定无人机该怎么飞。
* pos_ctrl:位置控制。
* att_ctr:姿态控制。
* mixer:力矩分配。
* motor_driver:驱动电机,从而实现无人机的运动。
