传感器部分,即IMU惯性测量单元,它主要由加速度计、陀螺仪、磁力计组成,负责采集无人机姿态数据。
[TOC]
# 1. 加速度计
加速度计用来获取加速度,从而获得无人机的横滚角Roll和俯仰角Pitch,无法获得偏航角Yaw。使用加速度计测量得到的角度无累积误差,低频特性比价好,但容易受到高频振动的影响。加速度计测得加速度后可以按式(4.1.2-1)获取角度:
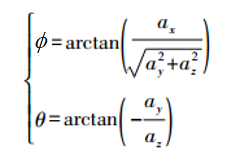---------------------------------------------------(4.1.2-1)
其中,`$ a_{x},a_{y},a_{z} $`为加速度计测得的加速度在三个方向的分量;`$ \phi ,\theta $`分别是绕X轴旋转得到的横滚角和绕Y轴旋转得到的俯仰角。[关于坐标系的定义见4.1.3-1小节与4.1.3-2小节](https://www.kancloud.cn/book/king_om/px_4/edit#1__5)
# 2. 陀螺仪
陀螺仪用来测量角速度,高频特性好。可以根据科里奥利力表达式:`$ F_{coriolis}=2m^{b}w×v $`求出角速度。然后通过对角速度进行积分得出角度,所以说陀螺仪也可以测量角度,包括横滚角Roll、俯仰角Pitch、偏航角Yaw。
# 3. 磁力计
磁场的变化会导致磁阻传感器电阻值发生变化,所以磁力计可以用来获取无人机飞行地点的磁场分布,从而获取偏航角Yaw和俯仰角Pitch,无法获取横滚角Roll,另外磁力计很容易受到干扰。

其中`$ m_{x}^{n},m_{y}^{n} $`为在磁场分量;`$ \psi_{mag} $`为绕Z轴得到的偏航角。
