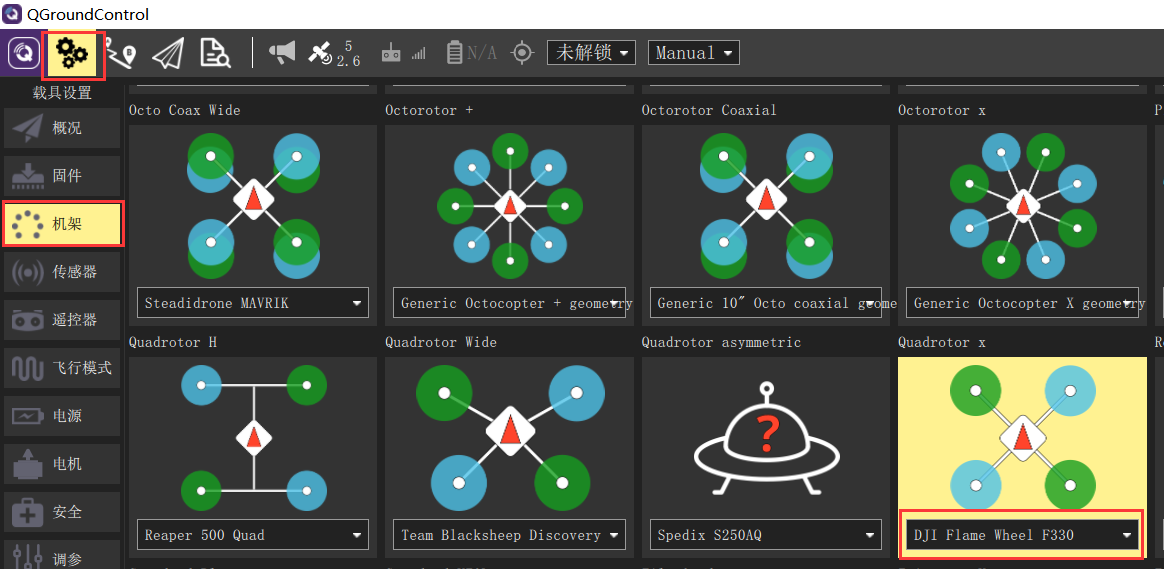
进行调试前先要选定的无人机的类型,不同的类型的无人机PID参数可能不一样。以下为本次调试选用的F330机架。
在3.2-2节中说过PX4使用的是双环控制器,一般只需调内环即可,而内环又只需调整俯仰(Pitch)的PID和横滚(Roll)的PID即可。如下图:
<br/>
对内环俯仰PID的调参结果如下图:
<br/>
所以决定内环俯仰PID采用:**P=0.6,I=0.02,D=0.006**;内环横滚PID采用:**P=0.5,I=0.02,D=0.006**。修改参数后如下:

