
## IO输出操作
**图形模块**:
>
**功能**:控制虚拟IO口输出高/低电平。
**说明**:`digital_IOA_Write(pin, val)`pin: 引脚编号0-31;val: 写入值 0或1。
**示例**:
```
mod_client.digital_IOA_Write(0,0)
```
***
## IO输入引脚读取
**图形模块**:
>
**功能**:读取虚拟IO口输入电平。
**说明**:`digital_IOA_Read(pin, val)`pin: 引脚编号0-31。
**示例**:
```
mod_client.digital_IOA_Read(0,0)
```
***
## 软IO中断操作
### 功能解释
**图形模块**:
定义中断回调函数
配置软中断并开启

关闭软中断
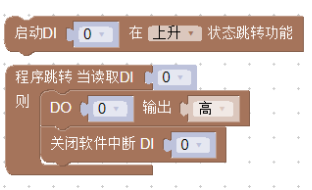
**功能**:该组操作函数为:(1)开启某IO引脚为输入状态并检测中断;(2)、当该IO引脚发生中断自动执行某函数;(3)、关闭某IO引脚中断功能。
**开启IO软中断**:
`digital_IOA_AttachInterrupt(pin,func,mode)`设置软中断Pin:中断管脚0-31;func:中断回调函数;mode:中断模式mod_client.RISING上升沿mod_client.FALLIN下降沿mod_client.CHANGE 改变。
**关闭IO软件中断**:
`digital_IOA_InterruptDisable(pin)`关闭引脚软中断。pin:引脚编号0-31。
### 示例
>
***
```
#定义IOA_AttachPinInterrupt_fun_0函数,执行中断任务
def IOA_AttachPinInterrupt_fun_0():
# 触发中断后1管脚输出高电平
mod_client.digital_IOA_Write(1,1)
#关闭0管脚软中断
mod_client.digital_IOA_InterruptDisable(0)
#开启IO引脚0软中断,上升沿触发,调用IOA_AttachPinInterrupt_fun_0()函数
mod_client.digital_IOA_AttachInterrupt (0,IOA_AttachPinInterrupt_fun_0,mod_client.RISING)
```
***
## 模拟量输出控制
**图形模块**:
>
**功能**:控制单片机寄存器模拟量输出至虚拟模型,如操作速度、大小等变量控制。
**说明**:`Float32_Write(pin,val)`向虚拟模拟量输出口。pin:模拟量引脚,0-7;val:模拟量值。
```
mod_client.Float32_Write(0,0)
```
***
## 模拟量输入读取
**图形模块**:
>
**功能**:读取虚拟世界的模拟量反馈,如旋钮开关,坐标数据等;
**说明**:`Float32_Read(pin)`读取虚拟模拟量。pin:模拟量引脚0-7;返回模拟量值。
```
mod_client.Float32_Read(0)
```
***
## 虚拟伺服电机速度控制
**图形模块**:
>
**功能**:设置某M电机的转动速度值为当前值,0~100;
**说明**:`Set_ServoSpeed(motor,peed)`设置电机速度。motor:伺服电机编号,0-7;speed:给定转速。
```
mod_client.Set_ServoSpeed(0,0)
```
***
## 虚拟伺服电机位置控制
**图形模块**:
>
**功能**:设置某M电机要达到的执行位置,输入值为浮点数float32;
**说明**:`Set_ServoPos(motor,pos)`设置电机位置。motor:伺服电机编号,0-7;pos:给定位置坐标。
```
mod_client.Set_ServoPos(0,0)
```
***
## 读取虚拟电机位置值
**图形模块**:
>
**功能**:读取某M电机当前的位置坐标值;
**说明**:`Get_ServoPos(motor)`读取电机坐标。motor:伺服电机编号,0-7;返回电机位置坐标。
```
mod_client.Get_ServoPos(0)
```
***
## 等待电机执行完成上一个动作
**图形模块**:
>
**功能**:阻塞线程,等待该M电机执行并达到目标位置pos点。
**说明**:`WaitFinish_ServoPos(motor)`等待电机运行结束。motor:伺服电机编号0-7。
```
mod_client.WaitFinish_ServoPos(0);
```
## 设置四轴机器人运行速度
**图形模块**:
>
**功能**:设置四轴码垛类型机器人的运行速度值。
**说明**:`Set_R4Speed(speed)`speed:运行速度。
```
mod_client.Set_R4Speed(0)
```
***
## 四轴器人单轴动作
**图形模块**:
>
**功能**:设置四轴码垛机器人某一个关节轴运行到某一点动作;
**说明**:`Set_R4SerialPos(motor, pos)`motor:轴编号,0-3;pos:运动位置。
```
Set_R4SerialPos(0, 0)
```
***
## 四轴器人本体动作
**图形模块**:
>
>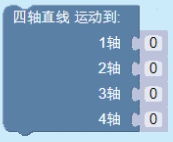
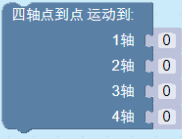
**功能**:设置四轴码垛机器人四个轴联动运行到某一个姿态点;
**说明**:`Set_R4Pos(pos1, pos2, pos3, pos4)`pos1, pos2, pos3, pos4四个轴的运动位置。
```
Set_R4Pos(pos1, pos2, pos3, pos4)
```
***
## 获取四轴码垛机器人某轴的位置值
**图形模块**:
>
**功能**:获取该机器人某一个轴的位置角度值;
**说明**:`Get_R4Pos(motor)`返回轴位置角度值;motor:轴编号0-3。
```
mod_client.Get_R4Pos(0)
```
***
## 等待四轴码垛机器人上一个动作执行完毕
**图形模块**:
>
**功能**:等待该动作完全执行完毕,才进行下面的代码运行(中断除外);
**说明**:`WaitFinish_R4()`
```
mod_client.WaitFinish_R4()
```
## 设置六轴机器人运行速度
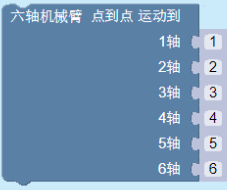
## 设置六轴机器人动作
- 欢迎使用IOA数字孪生
- IOA-更新与安装
- 软件注册与安装
- 软件使用协议
- 注册与使用
- (一)、认识IOA基础界面功能
- UI界面与设置
- 软件环境设置
- 三维导航操作
- 3D导航球使用
- 快捷键与仿真
- (二)、三维场景搭建
- 3D设计视频教程
- 坐标及旋转
- 模型参数设置
- 模型树与拼接
- 从SolidWorks到IOA放置的模型自制
- IOA辅助工具
- (三)、虚拟电气与调试
- 虚拟电气信号归类
- 虚拟接线与导出
- (三)、虚实控制与编程
- 西门子PLC的仿真与控制
- 西门子实体PLCS7-1214控制器的添加与控制
- 西门子虚拟PLCS7-1214控制器的添加
- 西门子PLCS7-1512控制器的添加
- 三菱PLC的仿真与控制
- 三菱PLC仿真器的使用说明
- 三菱PLC的添加与说明
- 工业机器人(纳博特)仿真
- 工业机器人(KEBA)仿真
- 工业机器人(埃夫特)仿真
- 协作机器人(遨博)仿真
- 运动控制(ZMC308)正运动仿真
- 机器视觉(VPLC516)正运动仿真
- 微型机器人(开塔)仿真
- Py-teach快速编程仿真
- 人工智能视觉仿真
- 单片机接入与仿真控制
- Mixly-UNO_S虚拟工厂SDK
- Mixly-MEGA_S虚拟工厂SDK
- Mixly-ESP32虚拟工厂SDK
- 树莓派与Python仿真
- (四)、自定义控制器添加
- modbus-tcp自定义控制器
- (五)、Py-teach模块化编程示教
- Py-teach软件使用
- 语法与编程
- py-teach快速编程在线教程
- (六)、SDK与二次开发
- modbus-tcp自定义控制器SDK
- 机器视觉开发SDK
- EAIDK-610固件烧录手册
- EAIDK-610快速上手手册
- EAIDK-610案例使用手册
- (七)、快速上手案例教程
- 西门子PLC虚实仿真公开课
- 纳博特工业机器人虚实仿真
- 三菱PLC虚实仿真
- (八)、XR多人互动
- (九)、问题归总
- (十)、IOA硬件虚实仿真导航
- IOA虚实控制器及案例下载
- 虚实控制器资源包
- 机器视觉与人工智能