
[TOC]
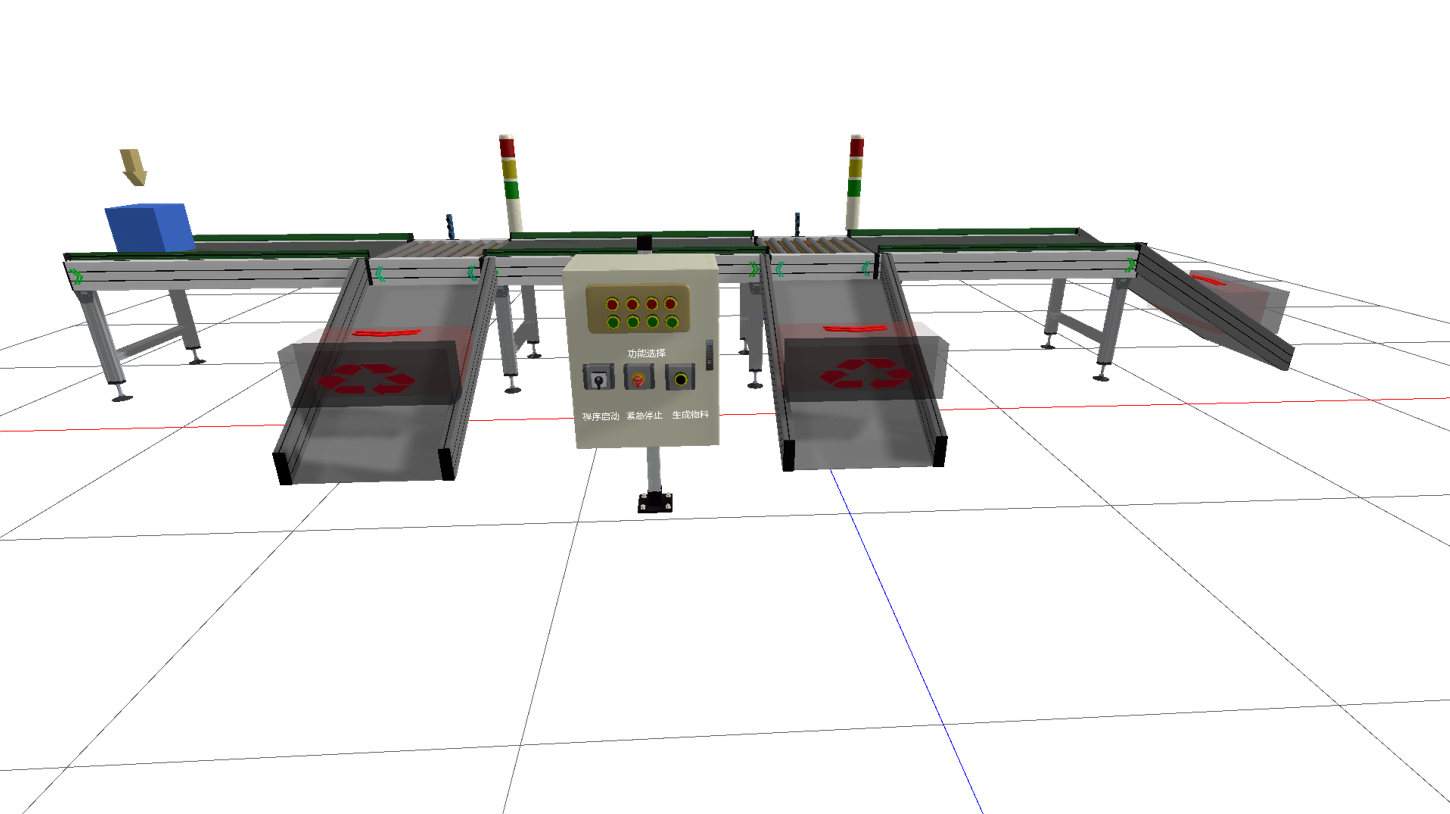
## 基于S7-1512的颜色分拣自动化([下载](https://pan.baidu.com/s/1nvM5Vzz3K64he6ryXPdBeg))
>* 简述:
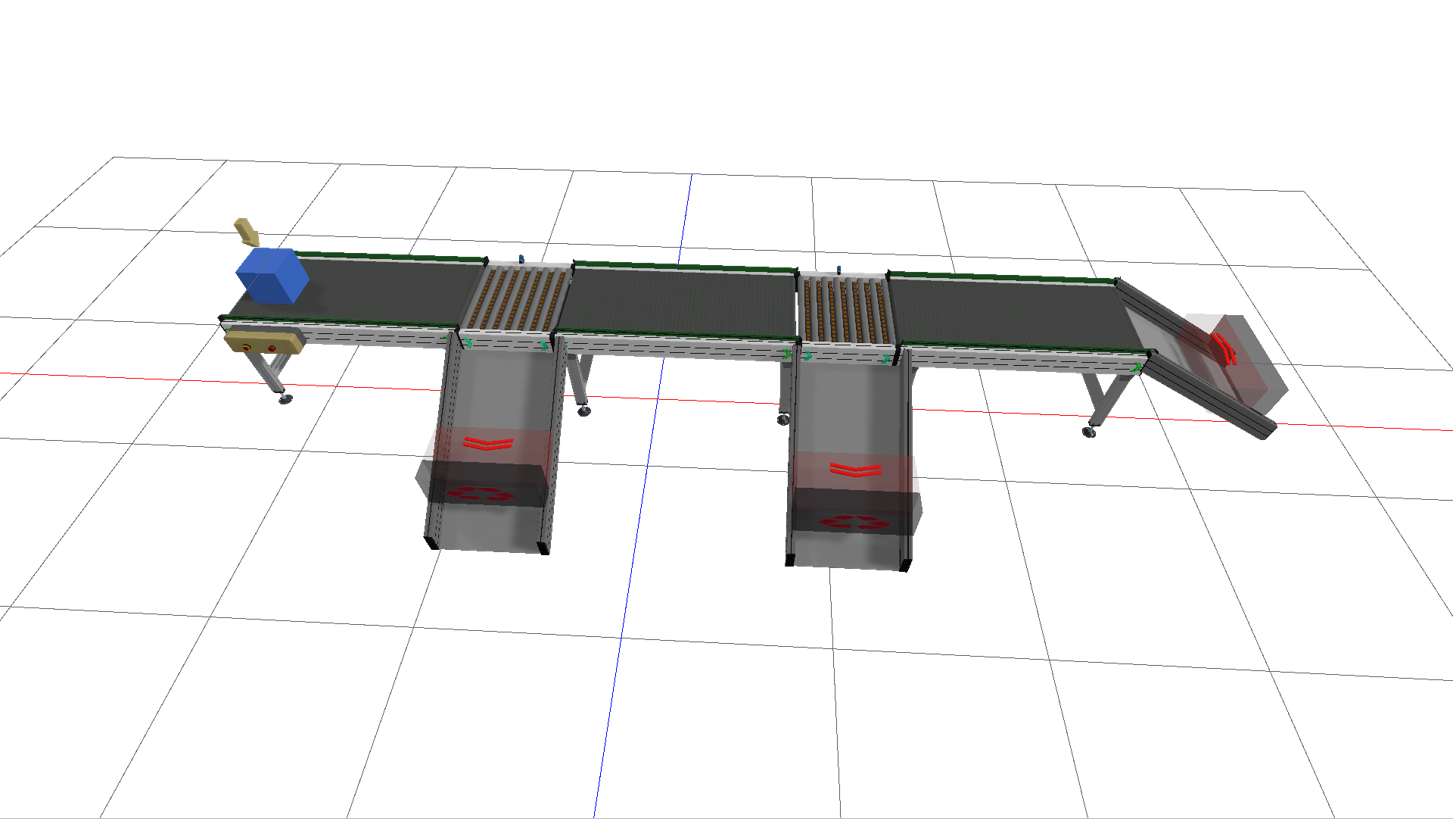
在工业生产中,需要根据需求分拣商品,提高效率,本案例主要介绍如何使用传感器和十字转向传送带达成简单的颜色分拣。
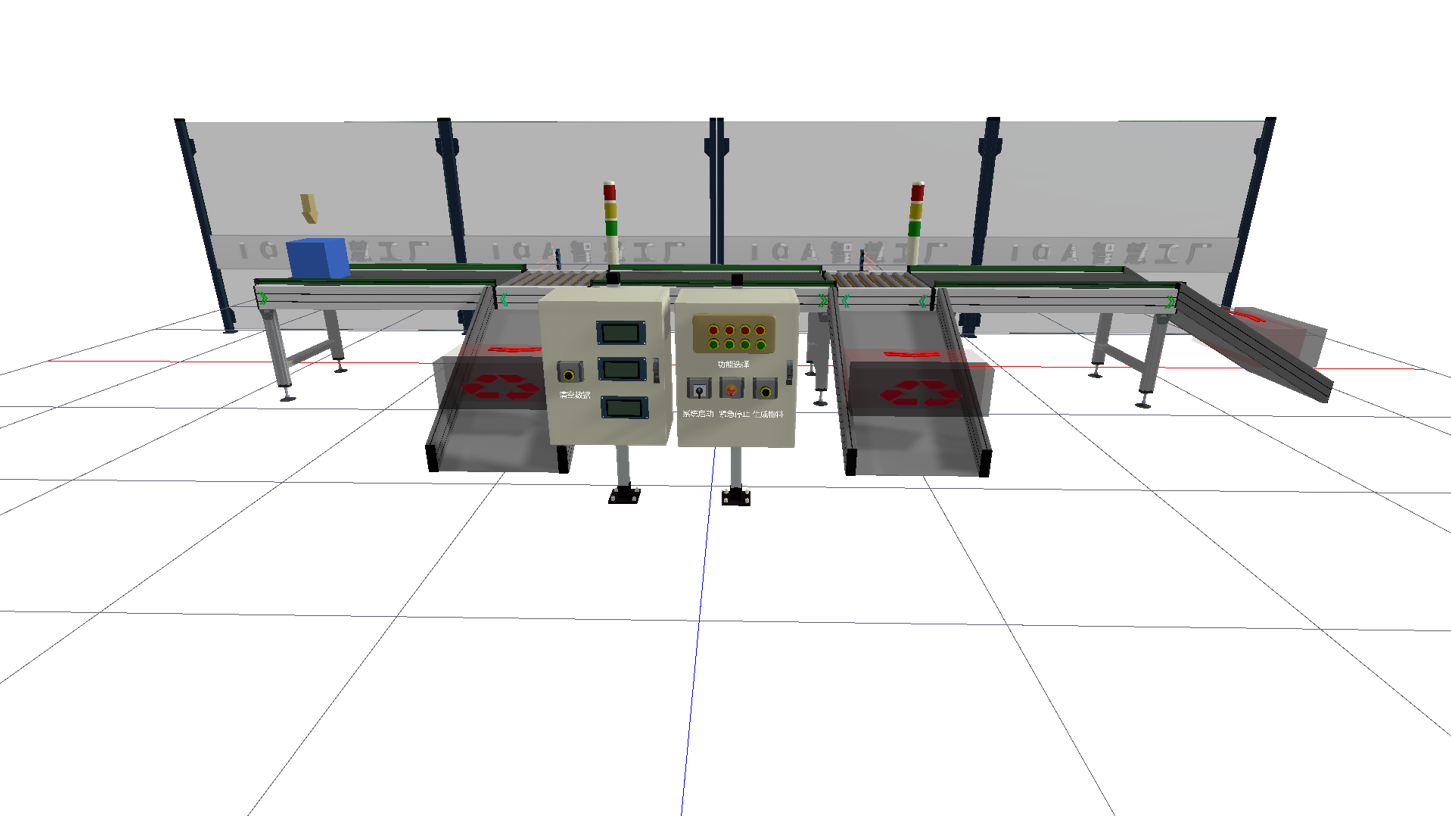
本仿真通过IOA5.0虚拟仿真软件对实际工厂生产线中不同物料挑选应用的简单复现。此次应用用来挑选不同颜色物料。它由十字转向、传送带、造物生成、颜色传感器等组成,可以实现不同颜色物料生成后,通过选择拨动按钮到不同档位,送指定的物料到达不同的位置。过程如下:按钮指定颜色物料,当物料运输到第一位置处时,颜色传感器给出颜色信号,如果为指定颜色,则十字转向动作,物料倒入斜坡,如为其他颜色则继续直行运输。
>* [视频讲解,运行](https://www.bilibili.com/video/BV1eS4y127mi?spm_id_from=333.999.0.0)
提取码1234
## 基于S7-1512的基础气动机械手搬运([下载](https://pan.baidu.com/s/1Nj8qog4Oo0u_NLgeev7GRg ))
>* 简述:
本案例主要为一个简单A到B的物流传输,通过传感器识别物流是否到达指定位置之后,让机器人对物料耗材进行一个
简单的搬运过程。
本仿真通过IOA5.0虚拟仿真软件对实际的物流搬运进行简单复现。此场景用来对两条传输带之间进行物流传输,它由
两条传输带、阻挡滚筒、造物生成、漫反射开关、机械臂等组成。可以实现物流从生产线A到生产线B的搬运。过程如下:
通过漫反射开关识别物流是否到达指定位置,当到达指定位置时传输带A停止,由机械臂夹取物料耗材到传输带B继续运行。
>* [视频讲解,运行](https://www.bilibili.com/video/BV1ti4y1k71V?spm_id_from=333.999.0.0)
提取码1234
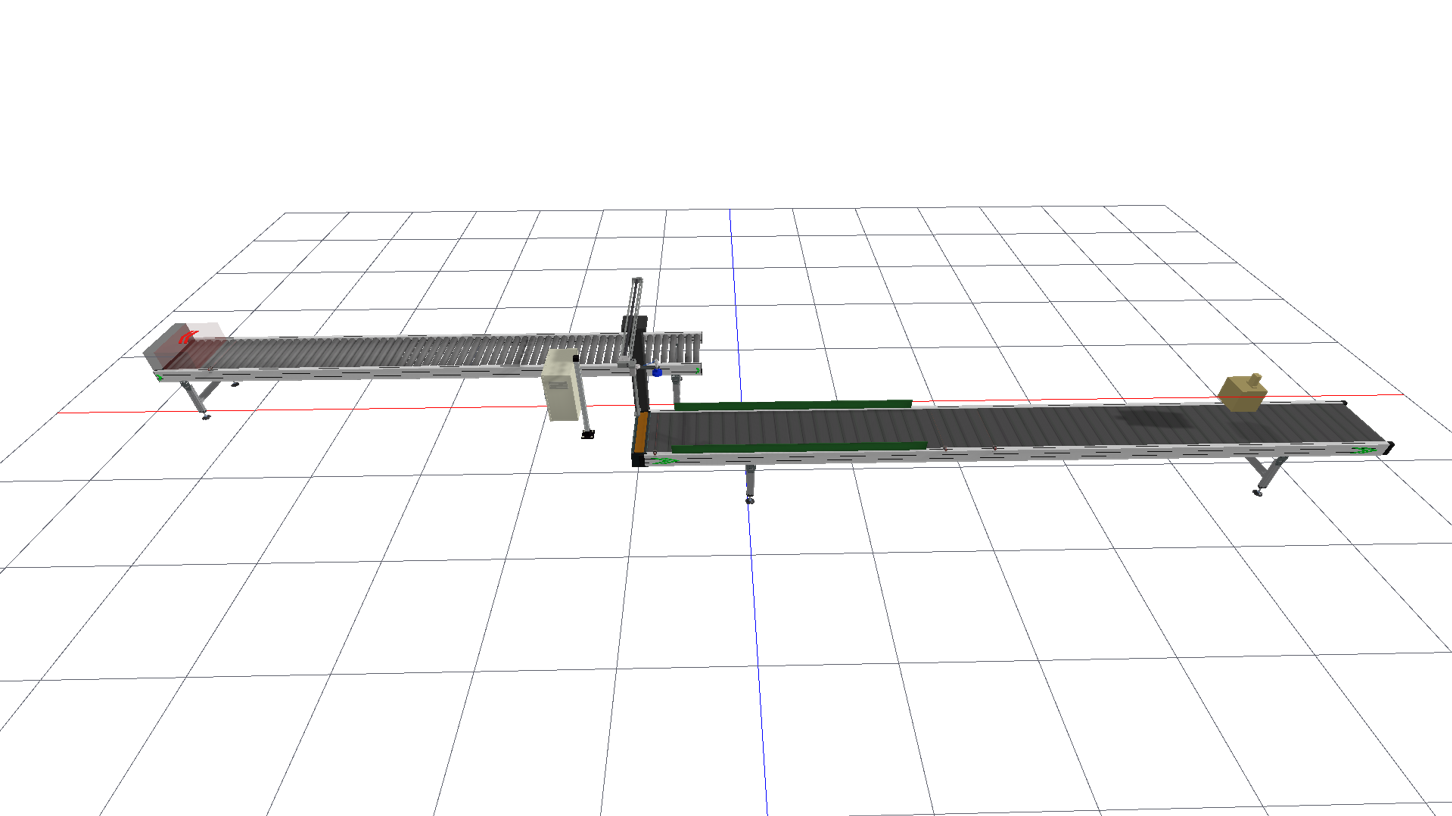
## 基于S7-1512的机械手单轴搬运( [下载](https://pan.baidu.com/s/1-rT_OMHpPg6ogvBq9nQrbw) )
>* 简述:
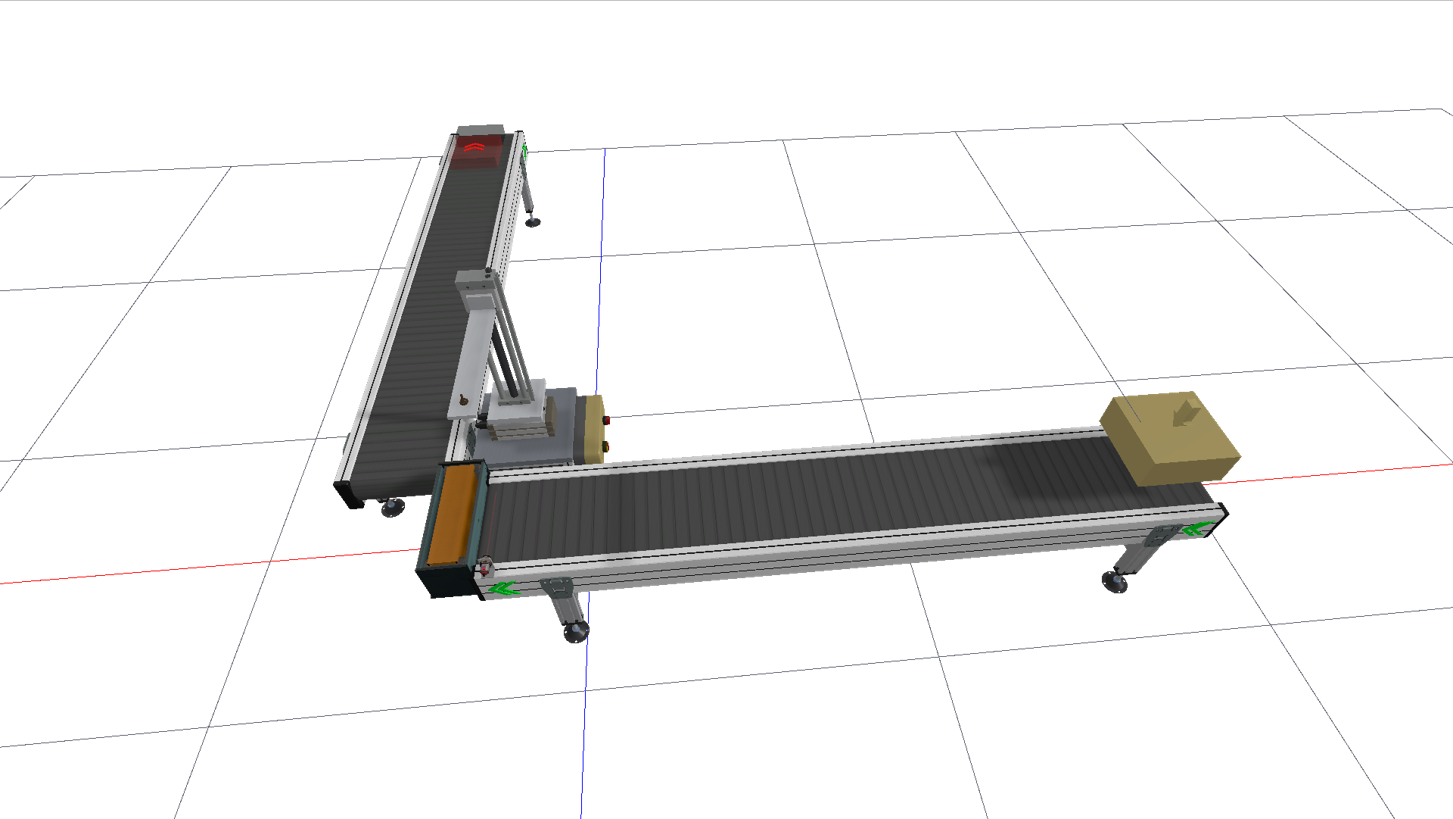
在日常生活中,由于网络的全面化网上购物数量增加,为满足人们日益增长的需求,本案例通过单轴龙门吊机械手对物料耗材进行搬运。
此案例由IOA5.0虚拟仿真软件对真实的物流搬运场景进行复现。此次应用用来展现工厂中一小部分的A到B搬运。它由龙门吊、气动推缸、漫反射开关、滑块、传输带、物料生成、按钮盒等组成,可以实现一个简单的物流搬运场景。过程如下:通过漫反射开关识别流是否到达指定位置,当到达指定位置时传输带A停止,由机械臂夹取物料耗材到传输带B继续运行。
>* [视频讲解,运行](https://www.bilibili.com/video/BV1d44y1N7Bk?spm_id_from=333.999.0.0)
提取码1234
## 基于S7-1512的两轴龙门搬运([下载](https://pan.baidu.com/s/126PthZDkBiXs8YGOXdoIWg ))
>* 简述:
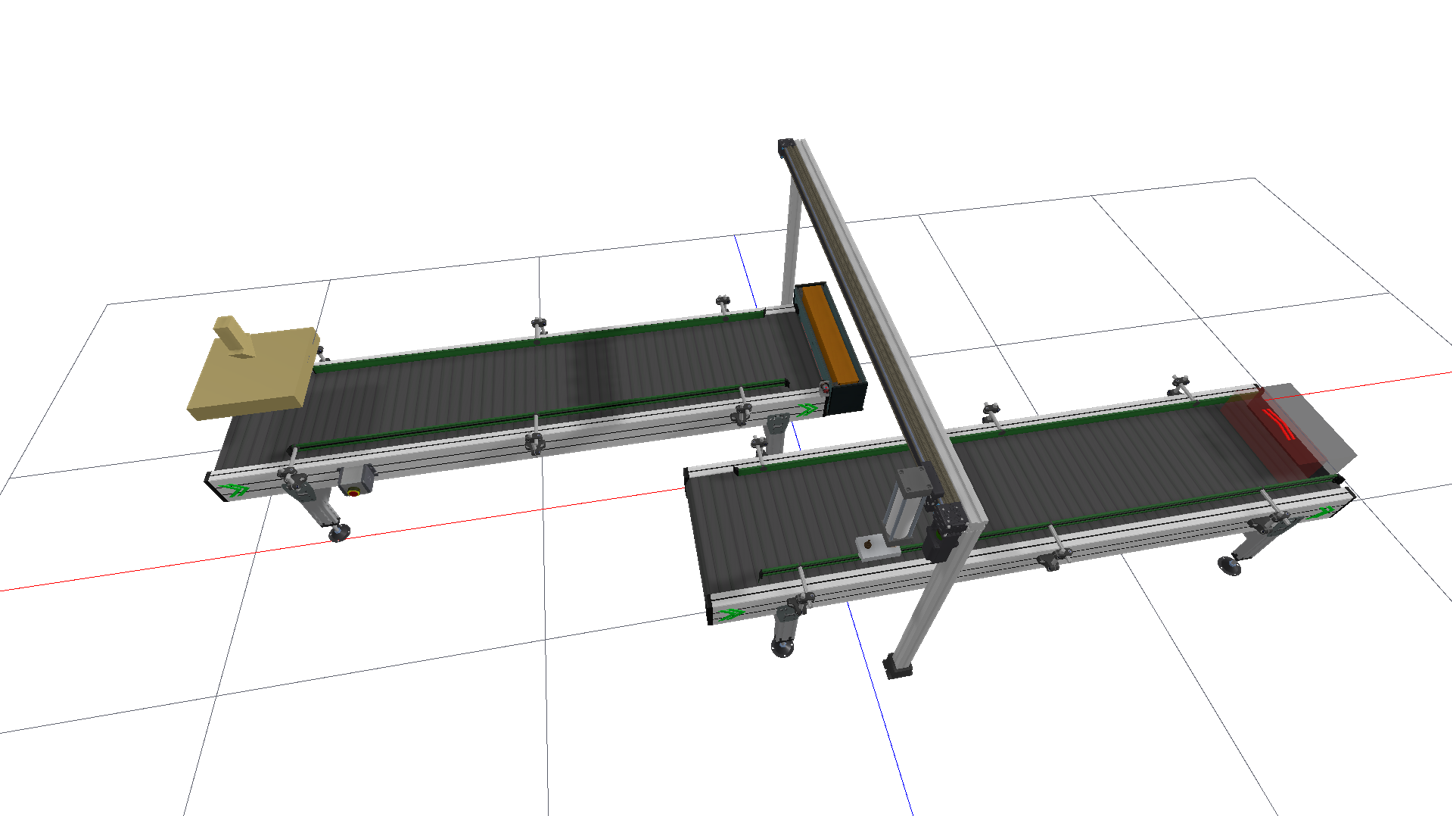
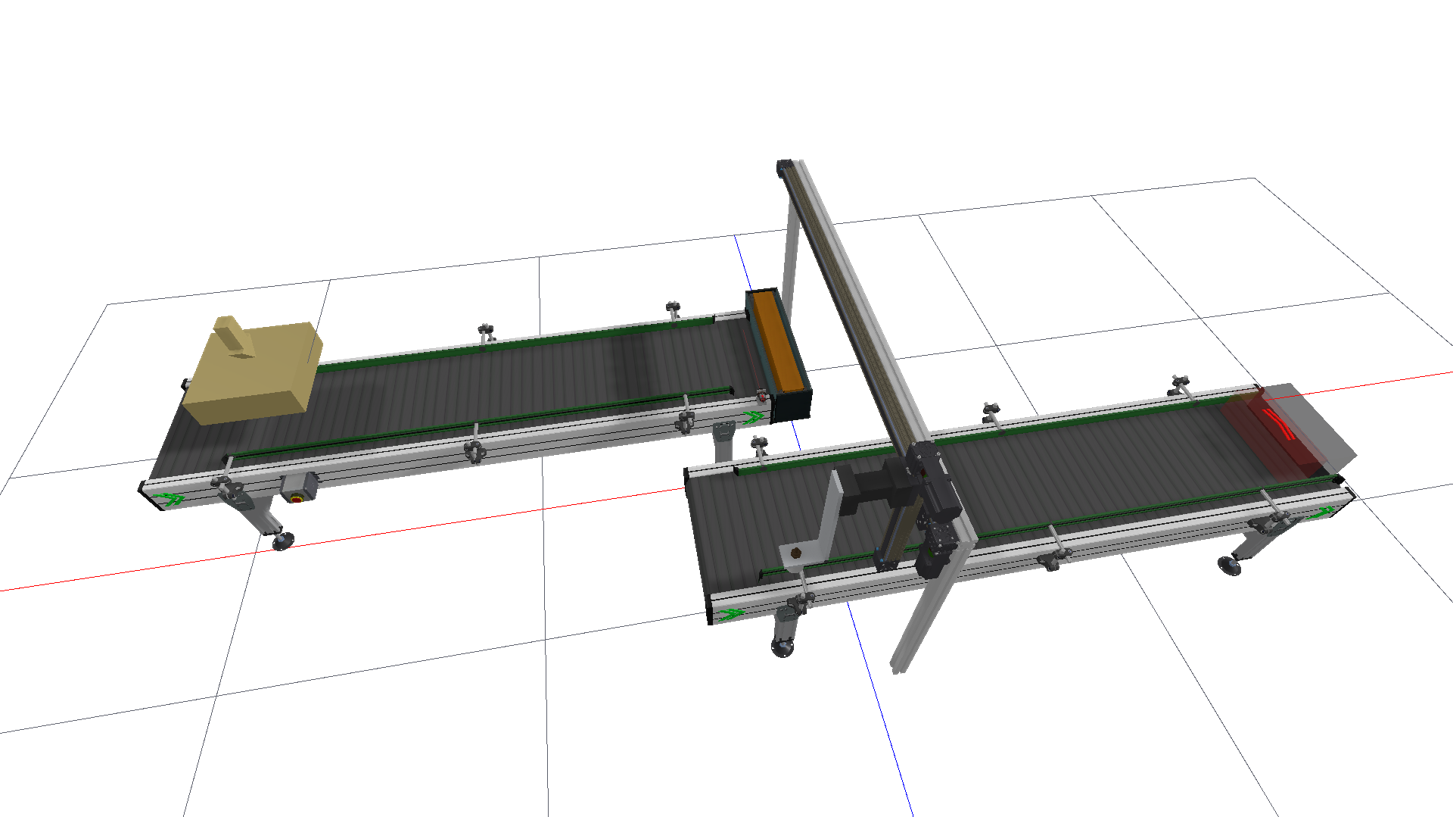
搬运作业是指用一种设备握持物品,将其从一个位置移到另一个位置。传统的人工搬运只能应用在物料轻便、尺寸和形状变化大、吞吐量小的场合。而这已经远远不能满足当下的需求,利用机械手完成搬运工作已成为当下发展的趋势。,本案例主要针对单轴机械手的搬运进行优化,由之前的一轴自由度升级为二轴自由度,可以适应于更加复杂的物流搬运场景。
此案例由IOA5.0虚拟仿真软件对真实的物流搬运场景进行复现。此次应用用来展现工厂中一小部分的A到B搬运。它由龙门吊、气动推缸、漫反射开关、滑块、传输带、物料生成、按钮盒等组成,可以实现当物料生成后,可以一直运行到传送带的末端,传感器感应到物料到达位置后,通过两个方向的气缸运动和吸盘的启停,实现将物料在传送带上转运的目的。
>* [视频讲解,运行](https://www.bilibili.com/video/BV1iP4y1T7gA?spm_id_from=333.999.0.0)
提取码1234
## 基于S7-1512的三轴龙门机械手码垛([下载](https://pan.baidu.com/s/1PohNFTexO8QO5lBDFBL_NQ ))
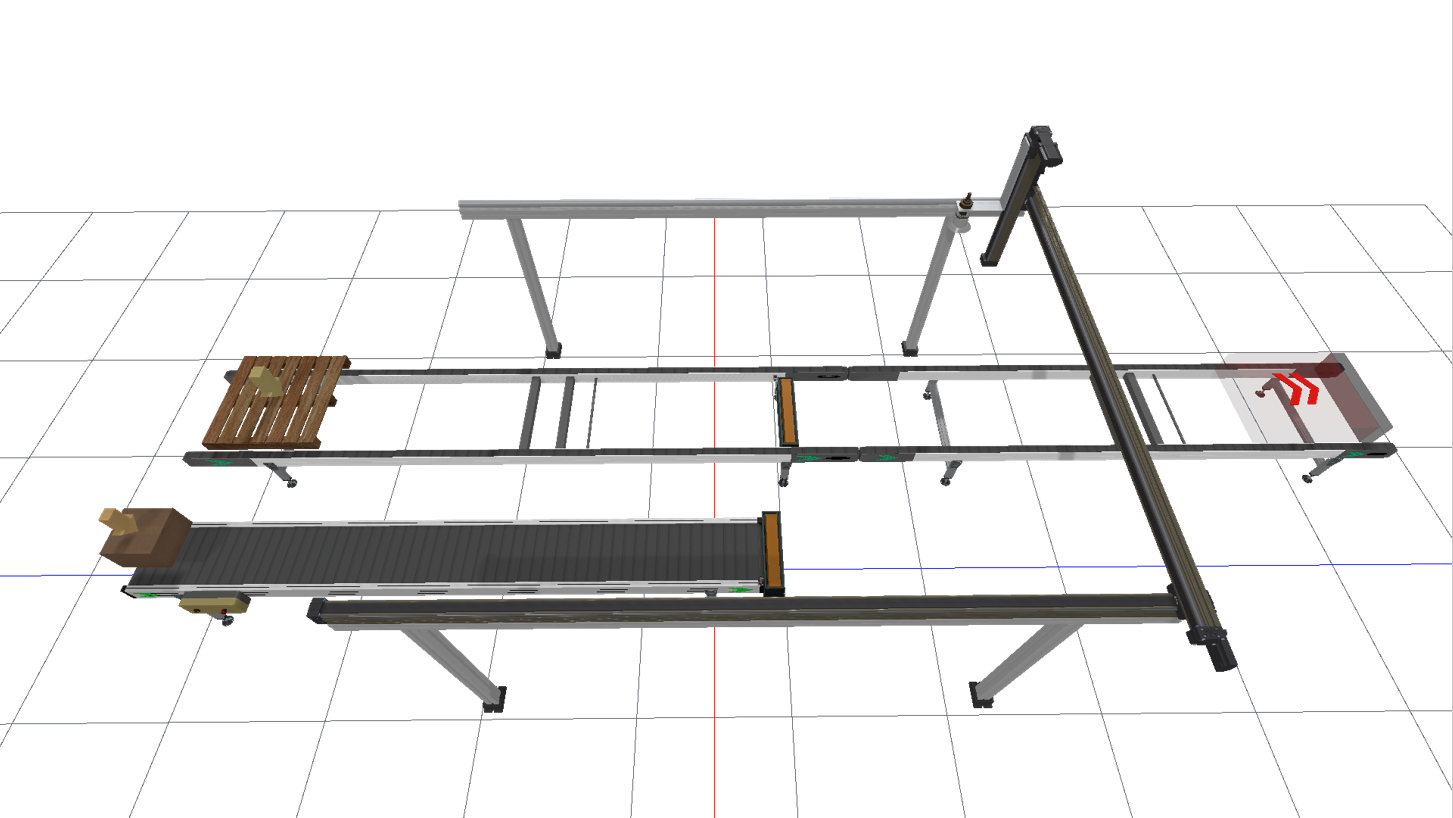
>* 简述:
在如今的大型工场中,为满足日益壮大的需求量许多工厂都开始采用大型机械进行作业。本案例主要主要介绍多个物料耗材放置于栈板进行运输。
此仿真实验使用IOA5.0虚拟仿真软件对实习工厂生产线的复现。它由pv大皮带、pv双皮带、漫反射开关、物料耗材、三轴龙门机械手、栈板等组成,过程如下:当pv传输带产生耗材到达尾端后,漫反射检测到耗材传输带停止,双皮带开始运输栈板,当漫反射检测到栈板到达尾端时双皮带停止,由三轴龙门吊机械手对物料进行抓取放置到栈板上,当栈板放满物料后,双皮带继续运行。
>* [视频讲解,运行](https://www.bilibili.com/video/BV1da411t7uP?spm_id_from=333.999.0.0)
提取码:1234
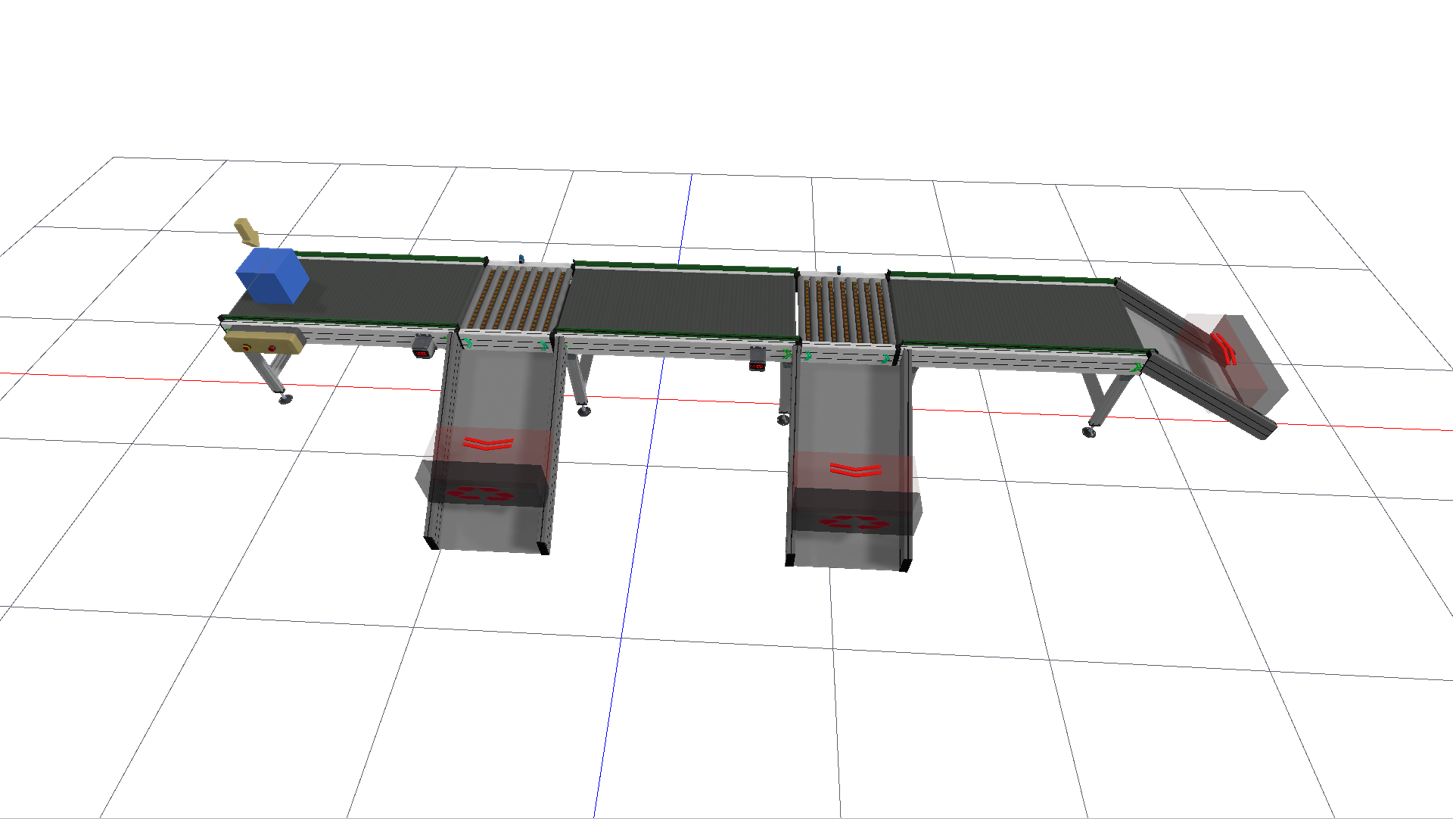
## 基于S7-1512的颜色分拣计数([下载](https://pan.baidu.com/s/1Gasf3IaQgufQP5Tl0kULcg ))
>* 简述:
本仿真通过IOA5.0虚拟仿真软件对实际工厂生产线中不同物料挑选应用的简单复现。此次应用用来挑选不同颜色物料。它由十字转向、传送带、造物生成、颜色传感器等组成,可以实现不同颜色物料生成后,通过选择拨动按钮到不同档位,送指定的物料到达不同的位置。过程如下:按钮指定颜色物料,当物料运输到第一位置处时,颜色传感器给出颜色信号,如果为指定颜色,则十字转向动作,物料倒入斜坡,如为其他颜色则继续直行运输。通过使用PLC读取模拟量来进行计数并在液晶显示器上显示出来。
提取码:1234
## 基于S7-1200的气动机械手搬运([下载](https://pan.baidu.com/s/1tjDvxM2o5WGj7k3JhH1jAQ))
>* 简述:
本仿真通过IOA5.0虚拟仿真软件对实际工业生产中使用机器手搬运物料的简单浮现。此次场景用来将传送带上的物料搬运到另一个传送带上。它由气缸、传送带、造物生成、传感器等组成,可以实现当物料生成后,可以一直运行到传送带的末端,传感器感应到物料到达位置后,通过两个方向的气缸运动和吸盘的启停,实现将物料在传送带上转运的目的。
提取码1234
## 基于S7-1200的传送带颜色筛选([下载](https://pan.baidu.com/s/14WdCfWy4xdIVM9HskHjejw ))
>* 简述:
本仿真通过IOA5.0虚拟仿真软件对实际工厂生产线中不同物料挑选应用的简单复现。此次应用用来挑选不同颜色物料。它由十字转向、传送带、造物生成、颜色传感器等组成,可以实现不同颜色物料生成后,通过选择拨动按钮到不同档位,送指定的物料到达不同的位置。过程如下:按钮指定颜色物料,当物料运输到第一位置处时,颜色传感器给出颜色信号,如果为指定颜色,则十字转向动作,物料倒入斜坡,如为其他颜色则继续直行运输。
提取码1234
## 基于S7-1200的传送带颜色筛选扩展([下载](https://pan.baidu.com/s/1snWCcw3BcxBOVHWsZidA_g ))
>* 简述:
本仿真通过IOA5.0虚拟仿真软件对实际工厂生产线中不同物料挑选应用的简单复现。此次应用用来挑选不同颜色物料。它由十字转向、传送带、造物生成、颜色传感器等组成,可以实现不同颜色物料生成后,通过选择拨动按钮到不同档位,送指定的物料到达不同的位置。过程如下:按钮指定颜色物料,当物料运输到第一位置处时,颜色传感器给出颜色信号,如果为指定颜色,则十字转向动作,物料倒入斜坡,如为其他颜色则继续直行运输,在物料的运输过程中,通过输入浮点数进行计数。
提取码1234
## 基于S7-1512和NRC_R6的机器人及数控加工搬运([下载](https://pan.baidu.com/s/1vQOWBBoI6TX1zAG1xgUWJQ))
>* 简述:
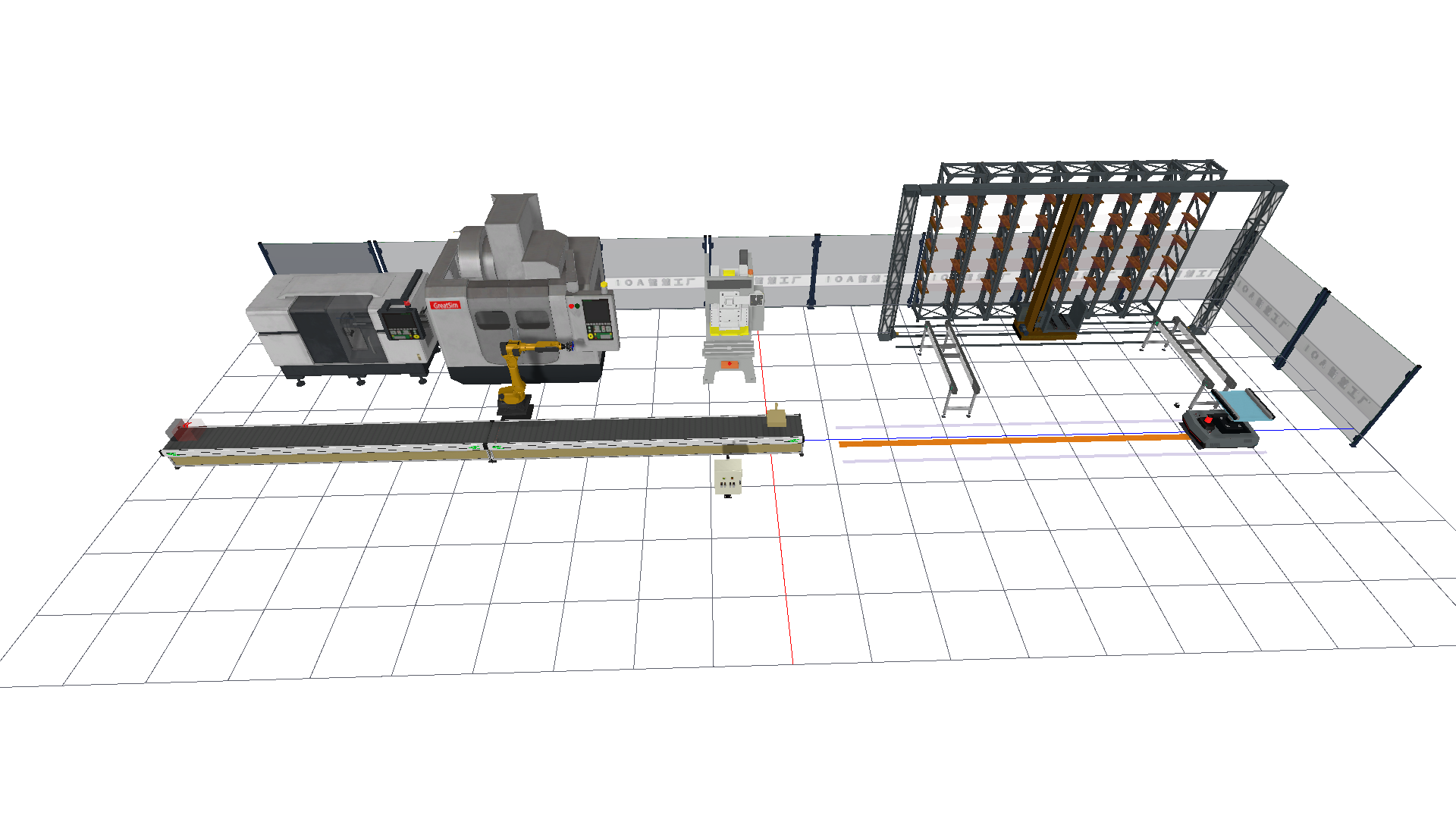
本案例是通过IOA5.0虚拟仿真软件建立的一个虚拟的工厂环境,根据真实的工厂环境通过虚拟工厂搭建传输线、CNC数控加工中心、物料生成、机器人、传感器等机电元件,完成基本的机器人搬运加工工作站的环境布局。通过纳博特机器人控制器进行虚拟的IO配置,完成工业机器人与PLC通过MODBUS进行信号对接通讯,通过虚拟的仿真示教器编程,完成机器人的搬运动作,由PLC完成控制CNC数控加工中心进行物料加工,并最终完成工业机器人实际搬运项目综合调试的项目集成。
提取码1234
- 欢迎使用IOA数字孪生
- IOA-更新与安装
- 软件注册与安装
- 软件使用协议
- 注册与使用
- (一)、认识IOA基础界面功能
- UI界面与设置
- 软件环境设置
- 三维导航操作
- 3D导航球使用
- 快捷键与仿真
- (二)、三维场景搭建
- 3D设计视频教程
- 坐标及旋转
- 模型参数设置
- 模型树与拼接
- 从SolidWorks到IOA放置的模型自制
- IOA辅助工具
- (三)、虚拟电气与调试
- 虚拟电气信号归类
- 虚拟接线与导出
- (三)、虚实控制与编程
- 西门子PLC的仿真与控制
- 西门子实体PLCS7-1214控制器的添加与控制
- 西门子虚拟PLCS7-1214控制器的添加
- 西门子PLCS7-1512控制器的添加
- 三菱PLC的仿真与控制
- 三菱PLC仿真器的使用说明
- 三菱PLC的添加与说明
- 工业机器人(纳博特)仿真
- 工业机器人(KEBA)仿真
- 工业机器人(埃夫特)仿真
- 协作机器人(遨博)仿真
- 运动控制(ZMC308)正运动仿真
- 机器视觉(VPLC516)正运动仿真
- 微型机器人(开塔)仿真
- Py-teach快速编程仿真
- 人工智能视觉仿真
- 单片机接入与仿真控制
- Mixly-UNO_S虚拟工厂SDK
- Mixly-MEGA_S虚拟工厂SDK
- Mixly-ESP32虚拟工厂SDK
- 树莓派与Python仿真
- (四)、自定义控制器添加
- modbus-tcp自定义控制器
- (五)、Py-teach模块化编程示教
- Py-teach软件使用
- 语法与编程
- py-teach快速编程在线教程
- (六)、SDK与二次开发
- modbus-tcp自定义控制器SDK
- 机器视觉开发SDK
- EAIDK-610固件烧录手册
- EAIDK-610快速上手手册
- EAIDK-610案例使用手册
- (七)、快速上手案例教程
- 西门子PLC虚实仿真公开课
- 纳博特工业机器人虚实仿真
- 三菱PLC虚实仿真
- (八)、XR多人互动
- (九)、问题归总
- (十)、IOA硬件虚实仿真导航
- IOA虚实控制器及案例下载
- 虚实控制器资源包
- 机器视觉与人工智能