
[TOC]
***********
## IOA平台概述
:-: 
:-: [视频播放](<//player.bilibili.com/player.html?bvid=BV16a4y1L7Fm&page=1"> ); [官网链接](http://www.ioaol.com/)
IOA-数字孪生仿真应用是一套综合性的实训平台,该平台通过采用数字化双胞胎技术,将虚拟工厂的机电系统与真实的工业自动化控制系统打通,通过丰富的3D虚拟交互形式,从而实现对智慧工厂电气配线、网络配置、控制教学、组态编程实训应用等目的。
虚拟数字式智慧工厂采用真实的西门子PLC系统,工业机器人运动控制器以及真实的数控系统,通过硬件模拟技术打通控制器与虚拟化的通信,即学生操作实训采用真实的PLC编程控制,以及工业机器人编程应用,MES调度以及数控设备的实操,通过虚拟装备的3D展示,达到与真实的智慧工厂同样的实训效果。
* 模拟:用户自建工厂、虚拟工厂云工程平台
* 仿真:虚拟电气接线、CAD电气接线
* 交互:多屏三维互动 + AR交互 + VR沉浸式体验
* 内容:电气CAD、PLC编程、机器人示教、组态控制
* 资源:虚拟工厂模型库、高端智造虚实转化
* 特点:以实控虚、以虚代实、虚实结合
## IOA虚实仿真功能概述
:-: 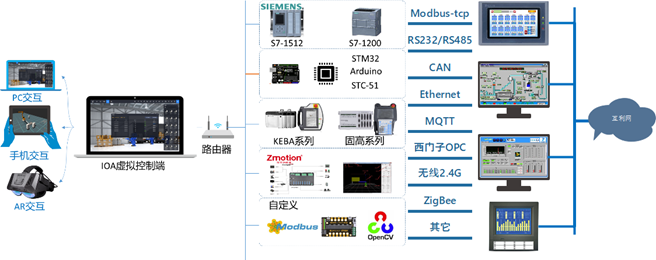
IOA虚拟仿真支持虚拟和真实的多种控制器实时仿真及混合仿真,通过虚实孪生技术,将虚拟工厂的机电系统与真实的工业自动化控制系统打通,以丰富的3D虚拟交互形式,从而实现对智慧工厂电气配线、网络配置、控制教学、组态编程实训应用等目的。
| 序号 | 系列 | 控制系统 |真实控制器 |虚拟控制器 |
| --- | --- | --- |--- |--- |
| 1 | 机器人 | KEBA机器人 |支持 |支持 |
| 2 | 机器人 | 固高示教器 |支持 |无 |
| 3 | 机器人 | 纳博特控制器 |支持 |支持 |
| 4 | 机器人 | 正运动控制器 |支持 |支持 |
| 5 | 机器人 | Python机器人 |无 |支持 |
| 6 | 机器人 | ABB机器人 |支持 |支持 |
| 7 | PLC系统 | 西门子S7-1200 |支持 |支持 |
| 8 | PLC系统 | 西门子S7-1500 |支持 |支持 |
| 9 | PLC系统 | 三菱PLC |支持 |支持 |
| 10 | 运动控制系统 | 正运动ZMC |支持 |支持 |
| 11 | 嵌入式单片机 | Arduino-UNO |支持 |支持 |
| 12 | 嵌入式单片机 | ESP32 |支持 |支持 |
| 13 | 二次开发 | Python |无 |支持 |
| 14 | 二次开发 | JAVA |无 |支持 |
| 15 | 二次开发 | LabVIEW |无 |支持 |
| 16 | 二次开发 | C# |无 |支持 |
| 17 | 机器视觉 | LabVIEW、Python |无 |支持 |
## IOA数字化全流程智能制造仿真
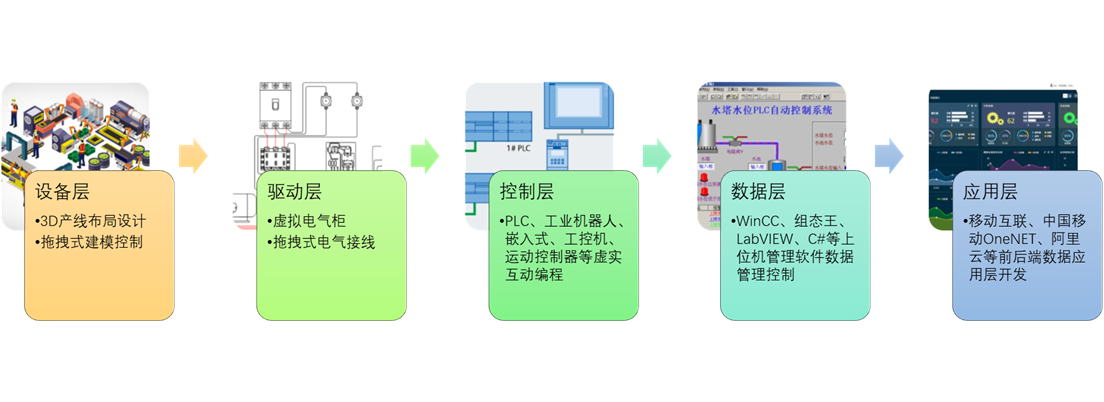
IOA内置丰富的3D模型库、虚实孪生控制库、以及物理信号逻辑,能够按照智能工厂的设计流程,1:1的复现整个从设备层3D设计、驱动层电气接线、控制层互动编程、数据层组态编程、再到应用层的网络管理实现智慧工厂全流程设计与仿真的过程。
## IOA与传统仿真软件对比
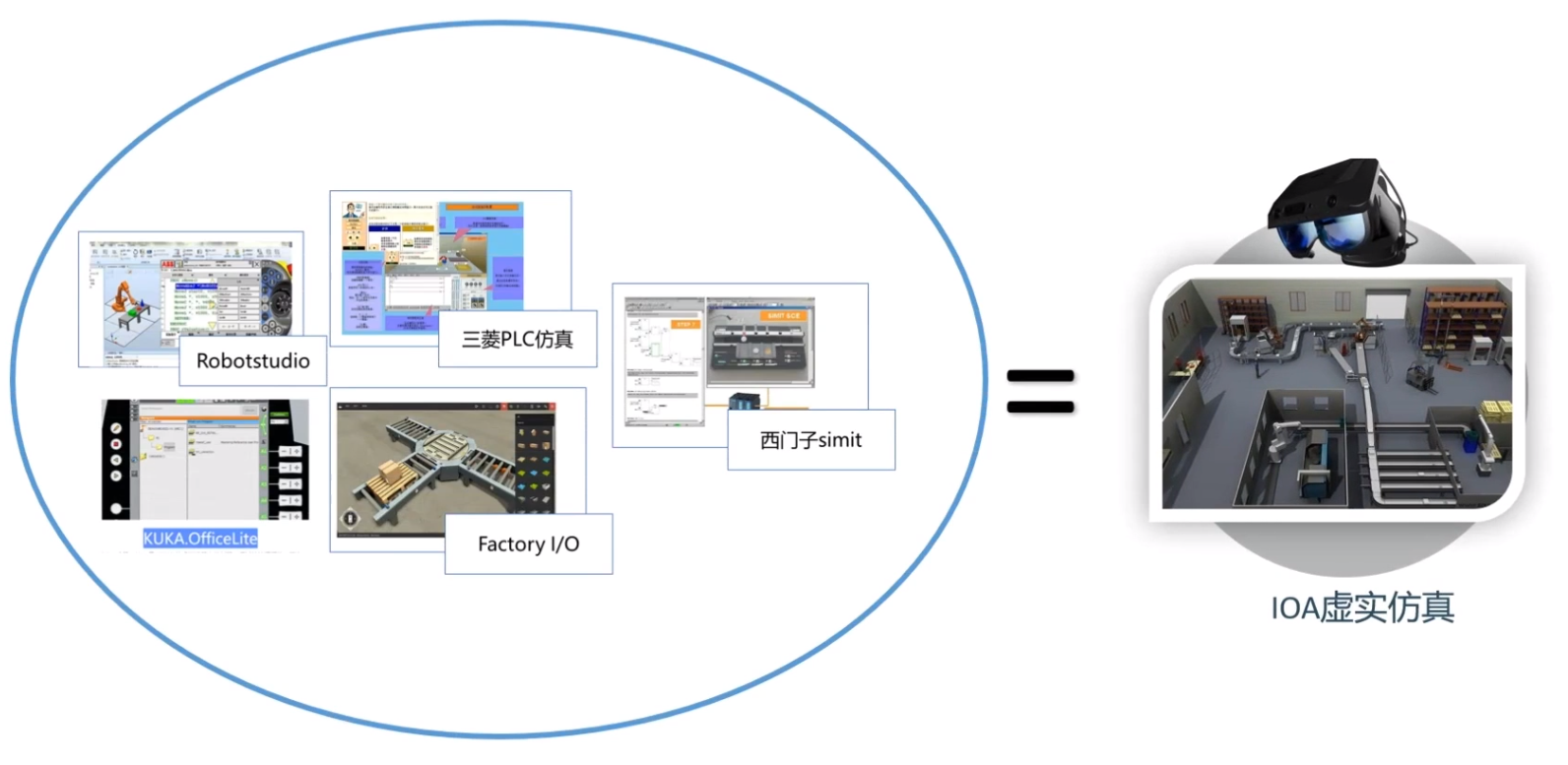
与传统的离线机器人仿真、工业机器人仿真以及3D数字孪生软件相比,IOA具有自由度高、配置丰富、简单易用等特点,IOA即作为国内首套虚实互动混合仿真的智能控制3D软件,能够与几乎市场上所有的控制器接入进行仿真,且具有非常高的易用性和灵活性。
>以ABB的Robotstudio为例,它虽然具有丰富的3D资源库能够进行互动仿真,但是只支持ABB的机器人仿真,不支持PLC和其它控制器接入,仅能够作为机器人示教和离线仿真应用;
>以国外的Factory I/O为例,它虽然具有丰富的交互和3D体验效果,但只是针对于PLC的编程逻辑控制,不支持工业机器人仿真和其它控制器接入,且适配过程繁琐;
而,IOA具有更好的兼容性和易用性,与传统的仿真软件和真实的硬件设备对比具有非常大的便携性和功能性优势,如下表所述:
| 序号 | 项目 | Robotstudio |Factory I/O |Visualcomponents |IOA仿真 |
| --- | --- | --- |--- |--- |--- |
| 1 | 产地 | 瑞典 |美国 |芬兰 | 国产 |
| 2 | 价格 | 低 |中 |很高 | 低 |
| 3 | PLC虚实仿真 | 无 |支持 |部分支持 | 全系列 |
| 4 | 模型库 | 丰富 |一般 |丰富 | 较好 |
| 5 | 机械臂 | ABB系列 |不支持 |无在线仿真 | ABB、KEBA、固高、纳博特、Python |
| 6 | 移动机器人 | 无 |无 |无 | 虚实仿真 |
| 7 | 硬件配套 | 无 |部分控制器 |实训台 | 多种组合 |
| 8 | 课程资源 | 多 |一般 |多 | 多 |
| 9 | 嵌入式 | 无 |无 |无 | 虚实结合 |
| 10 | 运动控制 | 无 |无 |少 | 支持|
| 11 | 模型库导入 | 支持 |无 |支持 | 支持|
| 12 | AR/VR | 无 |不详 |支持 | 支持|
>此外,IOA采用在线授权和升级方式,无论是模型库、工程库、软硬件功能,每季度都会更新更多的功能库,且所有功能和版本升级均为在线可升级,完全免费升级;
- 目录
- IOA互动仿真
- 认识IOA虚拟仿真
- IOA功能与导航
- 数字孪生资源
- 软件使用协议
- 注册与安装
- 注册与使用
- IOA安装及激活
- IOA操作及入门
- 概述
- 用户界面操作
- 基础操作
- 界面设置
- 屏幕录制
- 导航方式
- 快捷键与仿真
- 3D场景搭建
- 一般模型搭建
- 自定义模组拼接
- 电气控制箱拼接
- XYZ多轴机械手拼接
- 机器人吸盘、夹具拼接
- 自定义模型导入与使用
- 移动机器人场景搭建
- 建筑模型库
- 手动调试
- 模拟控制与调试
- 一般信号调试
- 工业机器人调试
- 自定义添加控制器
- 图形化Py-Teach控制器
- Py-R4控制器添加与控制
- Py-S4控制器添加与控制
- Py-R6控制器添加与控制
- 西门子PLC添加与控制
- 西门子实体PLC1214添加与控制
- 西门子虚拟PLC1214添加与控制
- 西门子虚拟PLC1512添加与控制
- 三菱PLC虚拟仿真
- 三菱PLC仿真器的使用说明
- 三菱PLC的添加与控制
- ZMC运动控制器
- VPLC运动视觉控制器
- KEBA工业机器人示教编程
- 纳博特机器人示教编程
- ABB机器人示教编程
- 遨博机器人示教编程
- 机器视觉与API
- Arduino-UNO单片机
- Arduino-MEGA单片机
- ESP32物联网单片机
- 虚拟电气接线
- 输入输出接口认识
- 控制器之间通讯
- 导出接线表
- VR仿真与多人互动
- PC多人互动
- VR多人互动
- APP多人互动
- IOA模型库概览
- 物流传输模型库说明
- 机械零件模型说明
- 机电单元模型说明
- 传感交互模型说明
- 人机交互模型
- 传感器模型
- 虚拟继电模型
- 机器人模型
- 物料模型库
- 移动机器人
- 建筑模型
- 虚实仿真教程
- 西门子S7-1200编程仿真
- 西门子S7-1500编程仿真
- 三菱虚拟PLC编程仿真
- KEBA工业机器人编程仿真
- 纳博特机器人编程仿真
- ABB机器人编程仿真
- Py-Teach通用示教器仿真教程
- Arduino-uno编程仿真
- Arduino-mega编程仿真
- ESP32物联网单片机编程仿真
- 机器视觉API及编程
- 正运动ZMC308编程仿真
- IOA硬件商城
- IOA产品概述
- 西门子PLC
- 运动控制系统
- KEBA机器人
- IOA孪生六轴机器人套装