
[TOC]
</div><div><br></div><div><br>
## S7-1200基础传送带A到B控制
**工具:**
1、IOA4.0仿真软件
2、博图TIA PortalV15
3、西门子PLC S7-1214实体箱
**概述:**
本案例主要是对实际工厂生产线中不同颜色物料挑选应用的简单复现。它由造物生成、皮带线、三色灯、十字转向、颜色传感器、切换开关以及十字开关等组成。当打开启动开关后,可以实现不同颜色物料生成,通过选择拨动十字开关按钮到不同档位,来使红黄绿三种颜色物料运送到不同地方。

**课程下载:**
下载链接:[链接](https://pan.baidu.com/s/11cYV-FCsGyuU4CWcvO_0Cg) 提取码:meo8
</div><div><br></div><div><br>
## S7-1200气动机械手搬运
**工具:**
1、IOA4.0仿真软件
2、博图TIA PortalV15
3、西门子PLC S7-1214实体箱
**概述:**
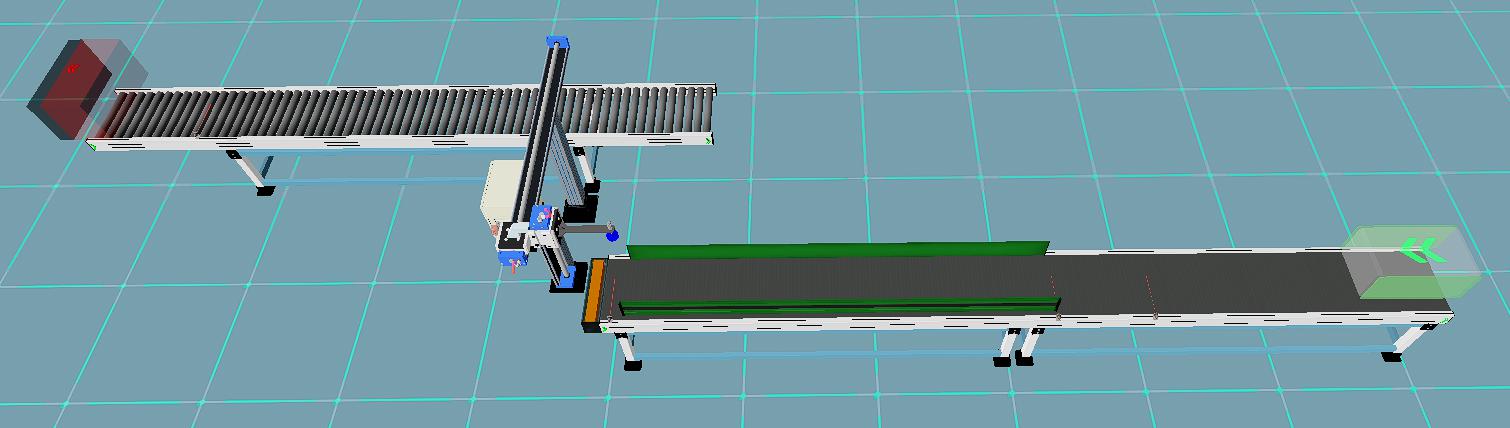
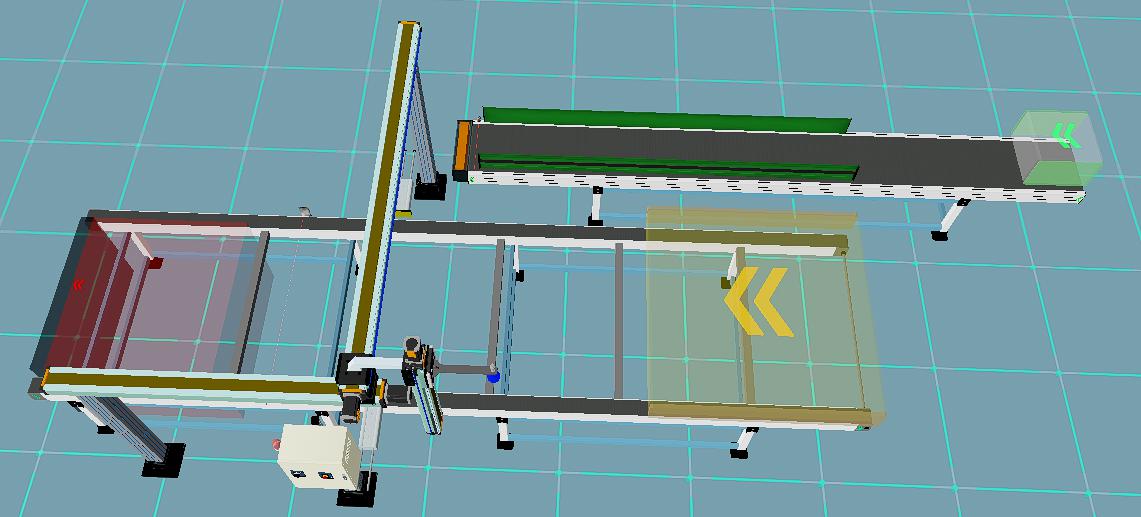
本案例主要是对实际工厂生产线中机械手运送物料应用的简单复现,它由气缸机械手、传送带、造物生成、阻挡气缸、漫反射传感器等组成,可以实现物料生成后由传送带运送到指定位置,再由传感器获取信号,然后机械手再开始动作,去抓取物料,然后由一条皮带线运输到另一条皮带线,最终运送到目的地。
**课程下载:**
下载链接:[链接](https://pan.baidu.com/s/1CBHLlAWYtBYabgBmYyR7Aw) 提取码:bkwq
</div><div><br></div><div><br>
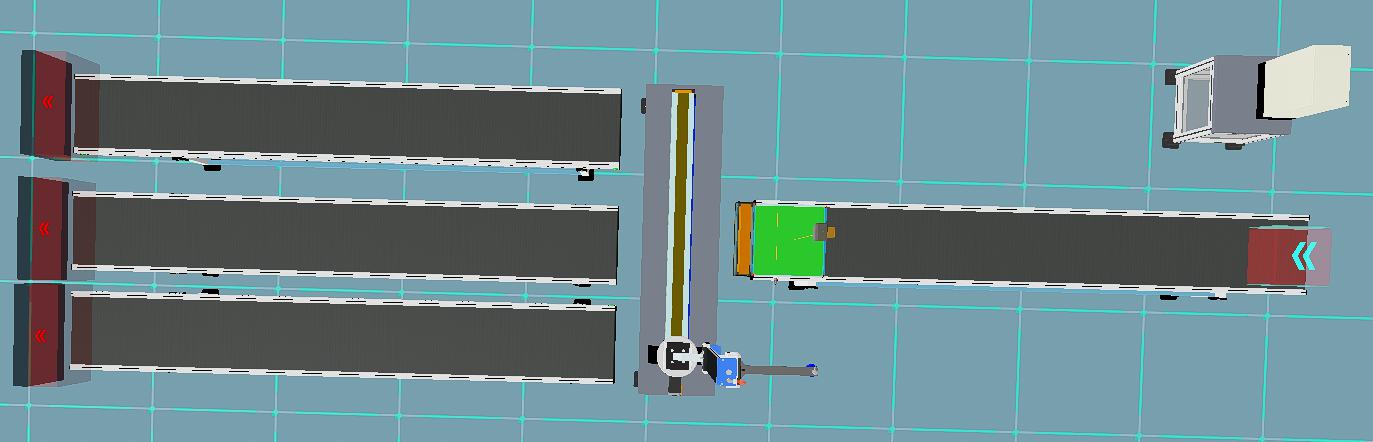
## S7-1200三轴混合机械手分拣
工具:
1、IOA4.0仿真软件
2、博图TIA PortalV15
3、西门子PLC S7-1214实体箱
**概述**:
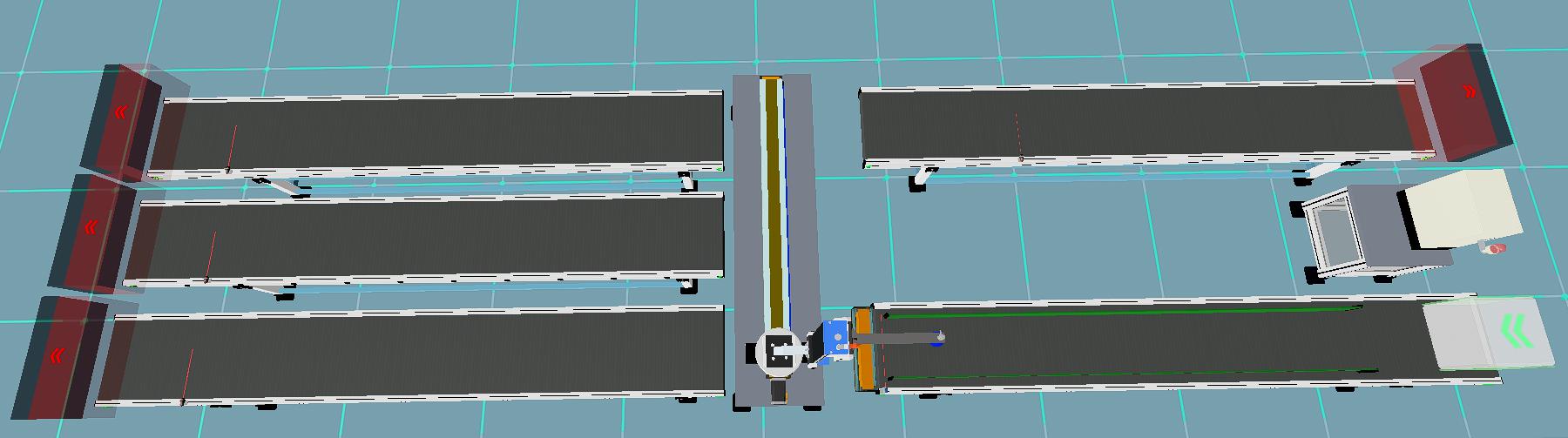
本案例主要是对实际工厂生产线中机械手运送物料应用的简单复现,它由气缸组合机械手、传送带、造物生成、阻挡气缸、漫反射传感器、颜色传感器等组成,此次应用用来挑选不同颜色物料。按下启动按钮后,来使红黄绿灰四种颜色物料运送到不同地方。
课程下载:
下载链接:[链接](https://pan.baidu.com/s/1NOfgREWdVMqfyThb9BFhng) 提取码:auku
</div><div><br></div><div><br>
## S7-1200仓储与Modbus通讯
**工具:**
1、IOA4.0仿真软件
2、博图TIA PortalV15
3、西门子PLC S7-1214实体箱
4、Modbus通讯助手ModbusTCP\_Master
**概述: **
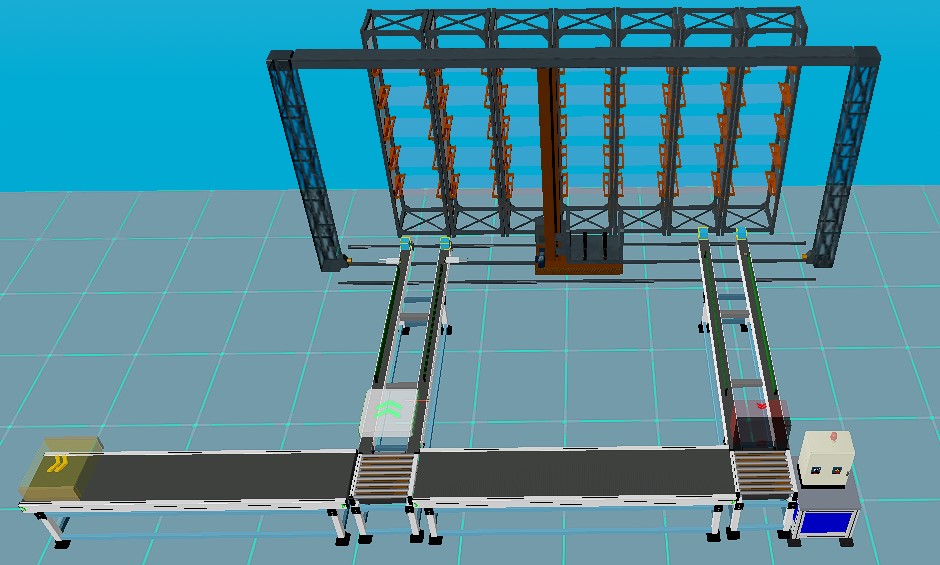
本案例主要介绍通过Modbus通讯实现对实际工厂生产线中物料的进出仓控制。系统运行后,栈板生成随着皮带线运送到进仓口位置,由传感器感应并停止栈板与皮带动作,电脑通过Modbus通讯发出信号,堆垛机接收信号开始动作,运动到进仓口,到位之后伸缩叉动作,将栈板送入库中设定的位置;出仓口则是相反,即堆垛机利用伸缩叉从库中取物料,然后送到出仓口,传感器感应到物料后,启动皮带运输走,至此,一个完整过程结束。
**课程下载:**
下载链接:[链接](https://pan.baidu.com/s/1jhyDq3u0GqWHNx7cHrbqeg) 提取码:m07m
</div><div><br></div><div><br>
## S7-1200水罐水量PID调节
**工具:**
1、IOA4.0仿真软件
2、博图TIA PortalV15
3、西门子PLC S7-1214实体箱
**概述:**
本案例采用水罐模型,水罐有进水口和出水口,通过PLC PID调节,当出水口在流水时,可以控制水罐水量保持在设定液位。

**课程下载:**
下载链接:[链接](https://pan.baidu.com/s/1Vj_XRFyAeMp5apnl1KRVlQ) 提取码:do8t
</div><div><br></div><div><br>
## S7-1200三轴龙门码垛
工具:
1、IOA4.0仿真软件
2、博图TIA PortalV15
3、西门子PLC S7-1214实体箱
**概述:**
本案例主要是对实际工厂生产线中三轴机械手运送物料并堆垛应用的简单复现,它由单轴机械手、传送带、造物生成、阻挡气缸、漫反射传感器、定位气缸等组成,此次应用只用来对物料进行堆垛。
**课程下载:**
下载链接:[链接](https://pan.baidu.com/s/1jZ3sAsw-kvRQNdWE3RUUJQ) 提取码:n13d
</div><div><br></div><div><br>
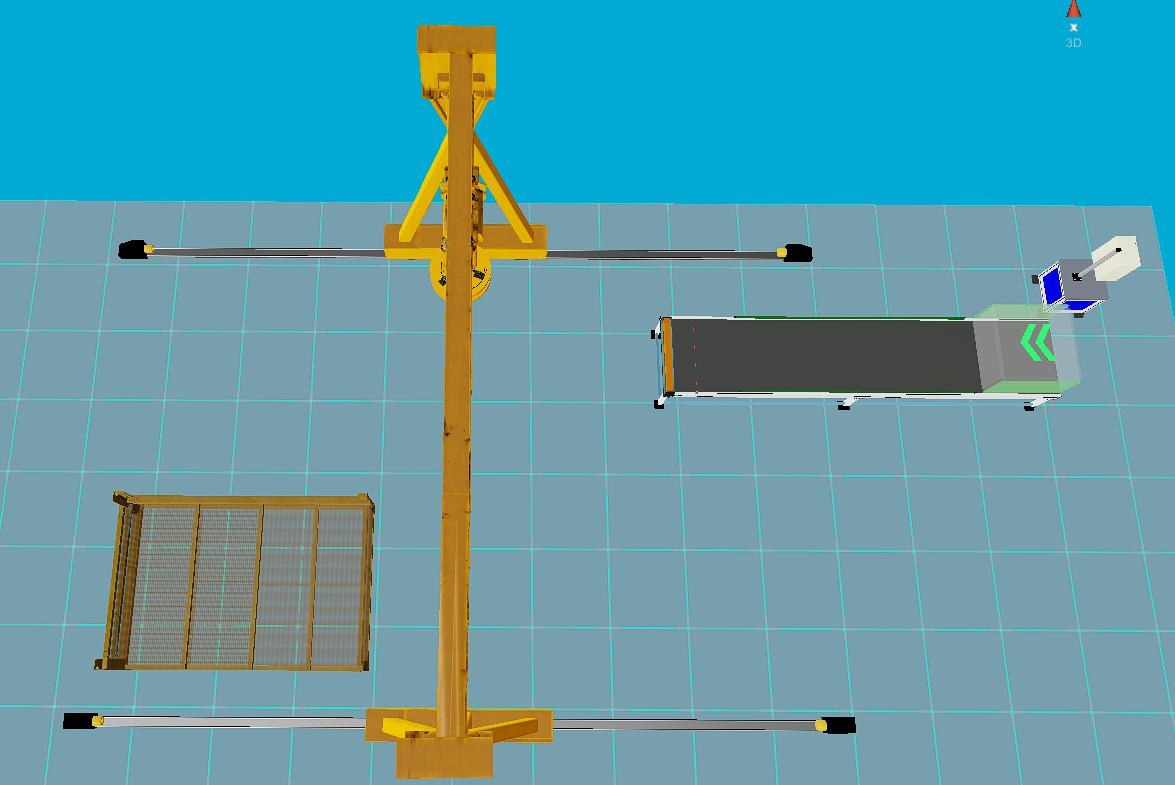
## S7-1200起重机遥控应用
**工具:**
1、IOA4.0仿真软件
2、博图TIA PortalV15
3、西门子PLC S7-1214实体箱
4、触摸屏组态软件
**概述:**
本案例本案例使用的是HMI控制,主要是对实际工厂生产线中起重机遥控的简单复现。它由造物生成、皮带线、漫反射开关、阻挡气缸、行车起重机、切换开关以及铁框等组成。当打开启动开关后,生成的物料由皮带线运输,光电感应到物料,线体停止,由HMI虚拟触控屏按钮遥控起重机将物料搬运至铁框处。
**课程下载:**
下载链接:[链接](https://pan.baidu.com/s/1OZcZFqnIchi7MimToyU-rw) 提取码:5yg9
</div><div><br></div><div><br>
## S7-1200视觉分拣
**工具:**
1、IOA4.0仿真软件
2、博图TIA PortalV15
3、西门子PLC S7-1214实体箱
4、 Labview2018 图像识别助手
**概述:**
本案例主要是对实际工厂生产线中视觉分拣应用的简单复现,它由几何模块生成、皮带线、阻挡气缸、漫反射开关、单轴机械手、直线气缸、旋转气缸、吸盘、切换开关等组成。当按下启动开关,可以实现随机形状物料生成后,由传送带运送到漫反射开关处,再由视觉相机拍照,经过labview软件分析物料形状,然后机械手将不同形状的物料运输到相应的皮带线。
**课程下载:**
下载链接:[链接](https://pan.baidu.com/s/1wkPsDU7enQBzoYQuVFdy2w) 提取码:ywim
- 目录
- IOA互动仿真
- 认识IOA虚拟仿真
- IOA功能与导航
- 数字孪生资源
- 软件使用协议
- 注册与安装
- 注册与使用
- IOA安装及激活
- IOA操作及入门
- 概述
- 用户界面操作
- 基础操作
- 界面设置
- 屏幕录制
- 导航方式
- 快捷键与仿真
- 3D场景搭建
- 一般模型搭建
- 自定义模组拼接
- 电气控制箱拼接
- XYZ多轴机械手拼接
- 机器人吸盘、夹具拼接
- 自定义模型导入与使用
- 移动机器人场景搭建
- 建筑模型库
- 手动调试
- 模拟控制与调试
- 一般信号调试
- 工业机器人调试
- 自定义添加控制器
- 图形化Py-Teach控制器
- Py-R4控制器添加与控制
- Py-S4控制器添加与控制
- Py-R6控制器添加与控制
- 西门子PLC添加与控制
- 西门子实体PLC1214添加与控制
- 西门子虚拟PLC1214添加与控制
- 西门子虚拟PLC1512添加与控制
- 三菱PLC虚拟仿真
- 三菱PLC仿真器的使用说明
- 三菱PLC的添加与控制
- ZMC运动控制器
- VPLC运动视觉控制器
- KEBA工业机器人示教编程
- 纳博特机器人示教编程
- ABB机器人示教编程
- 遨博机器人示教编程
- 机器视觉与API
- Arduino-UNO单片机
- Arduino-MEGA单片机
- ESP32物联网单片机
- 虚拟电气接线
- 输入输出接口认识
- 控制器之间通讯
- 导出接线表
- VR仿真与多人互动
- PC多人互动
- VR多人互动
- APP多人互动
- IOA模型库概览
- 物流传输模型库说明
- 机械零件模型说明
- 机电单元模型说明
- 传感交互模型说明
- 人机交互模型
- 传感器模型
- 虚拟继电模型
- 机器人模型
- 物料模型库
- 移动机器人
- 建筑模型
- 虚实仿真教程
- 西门子S7-1200编程仿真
- 西门子S7-1500编程仿真
- 三菱虚拟PLC编程仿真
- KEBA工业机器人编程仿真
- 纳博特机器人编程仿真
- ABB机器人编程仿真
- Py-Teach通用示教器仿真教程
- Arduino-uno编程仿真
- Arduino-mega编程仿真
- ESP32物联网单片机编程仿真
- 机器视觉API及编程
- 正运动ZMC308编程仿真
- IOA硬件商城
- IOA产品概述
- 西门子PLC
- 运动控制系统
- KEBA机器人
- IOA孪生六轴机器人套装