
[TOC]
</div><div><br></div><div><br>
IOA软件具有3D编辑区、模型库、工具栏、参数/控制设置以及系统栏,系统具有运行模式以及编辑模式两种模式状态,如下图所示;
*****
</div><div><br></div><div><br>
## **1、系统栏**

### 1.1欢迎菜单
| 按钮 |操作 |
| --- | --- |
| 通用 | 音频、画面质量、场景设置、场景资源、地面厚度 |
| 用户 | 用户登录 |
| 教程 | 跳转官网在线课程 |
| 工程 | 跳转官网工程中心 |
| 退出应用 | 退出软件 |
*****
</div><div><br>
### 1.2文件菜单
| 按钮 |操作 |
| --- | --- |
| 新建 | 新建文件 |
| 打开 | 打开文件 |
| 保存 | 保存文件 |
| 另存为 | 另存为文件 |
| 退出 | 退出软件 |
*****
</div><div><br>
### 1.3工具菜单
| 按钮 |操作 |
| --- | --- |
| 导出Excel | 导出场景模型与控制器的配置接线|
| 模型全锁 | 全锁模型 |
| 视频录制 | 录制IOA内视频 |
| 虚拟人物 | |
| 机器视觉 | 显示视觉相机拍摄内容 |
| Python编程 | 界面右侧弹出Python编程界面 |
*****
</div><div><br>
### 1.4 控制器菜单
控制器的添加与连接

控制器类别
| 类别 |型号 |
| --- | --- |
| 工业PLC | S7_1214_S1、S7_1512_S1、FX3U_V1|
| 运动控制器 | ZMC308_V1 |
| 单片机 | UNO_S 、UNO_R、MEGA_S、MEGA_R、MCU_S、ESP32_S、ESP32_R |
| 工业机器人 | KEBA_R6_V1、KEBA_R7_V1、KEBA_R4_V1、KEBA_S4_V1、KEBA_D4_V1、GUC_R6 |
| Mbus | Mbus_S、 Mbus_R4、Mbus_R6、Mbus_R7、Mbus_S4、Mbus_D4 |
*****
</div><div><br>
### 1.5 导入模型菜单
您可将自己自定义的模型导入IOA中。

*****
</div><div><br>
### 1.6 通信菜单
通讯菜单配合辅屏软件使用,要求主屏与辅屏连接在同一个局域网下
如图所示,点击“**通讯**”按钮,弹出“**多机通信**”界面,点击“**ip查看**”出现3个IP地址
辅屏输入主屏的IP地址,即可显示主屏当前操作界面。
*****
</div><div><br>
### 1.7 帮助菜单
点击跳转IOA数字孪生在线知识库
*****
</div><div><br></div><div><br>
## **2、工具栏**

| 图标 | 名称 |操作 |
| ---| --- | --- |
|  | 运行/停止 | 开始或停止仿真 |
|  | 刷新 | 点击后耗材消失 |
|  | 撤销 | 撤销上一个移动位置操作(不撤销返回) |
| | 重做 | 将最后一次撤销恢复到上一个移动位置(不撤销返回) |
| | 飞机视角 | 在飞机视角操作,即上帝视角 |
| | 第一人称 | 在第一人称操作(在运行模式下常用) |
| | 选择激活 | 激活后可选择设备 |
| | 移动 | 可通过箭头移动设备 |
| | 旋转 | 可通过选择对模型XYZ平面旋转(快捷键B、Z、X) |
| | 聚焦 | 以当前模型为中心(快捷键M) |
| | 坐标切换 | 切换为模型坐标/世界坐标 |
| | 模型控制 | 选择后打开控制面板 |
| | 模型设置 | 选择后打开模型参数面板 |
| | 模型库 | 打开或关闭模型库 |
*****
</div><div><br></div><div><br>
## **3、模型库**
模型库包括了IOA中所有可用的零件,分为自动化模型与建筑模型。从下拉列表中选择一个类别,以仅显示属于该类别的零件。
当使用自动化模型库时:您只需使用鼠标左键拖拽模型库中的设备模型到3D编辑区即可完成设备的添加;
当使用建筑模型库时:鼠标左键点击建筑模型,然后点击3D编辑区即可添加,可以对建筑模型可吸附式一个个的快速搭建,点击鼠标右键取消。

模型具体介绍可见**IOA模型库概览板块**
*****
</div><div><br></div><div><br>
## **4、3D编辑区**
在3D编辑区进行场景的搭建与仿真演示,具体过程见**3D场景搭建**模块
*****
</div><div><br></div><div><br>
## **5、参数\控制设置**
### 5.1模型设置功能说明
在模型设置按钮模式下,能够对模型进行尺寸、性能和位置角度的基本操作。
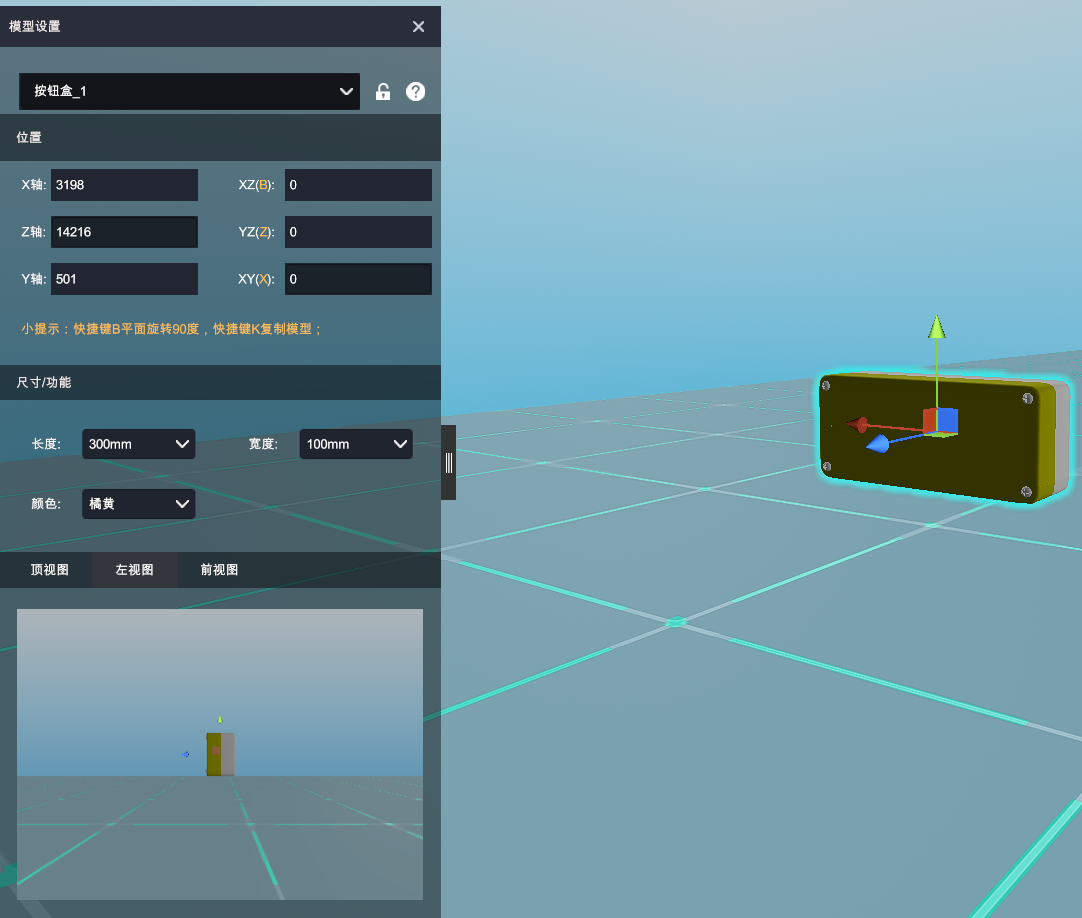
备注:
* 模型设置页码是在非运行模式下点击模型设置按钮打开;
* 模型设置多用在3D布局的环节之中使用;
* 并不是所有模型的尺寸可以更改,每个模型具有其特定的设置选项
* 通过输入框可改变模型坐标和角度
*****
</div><div><br>
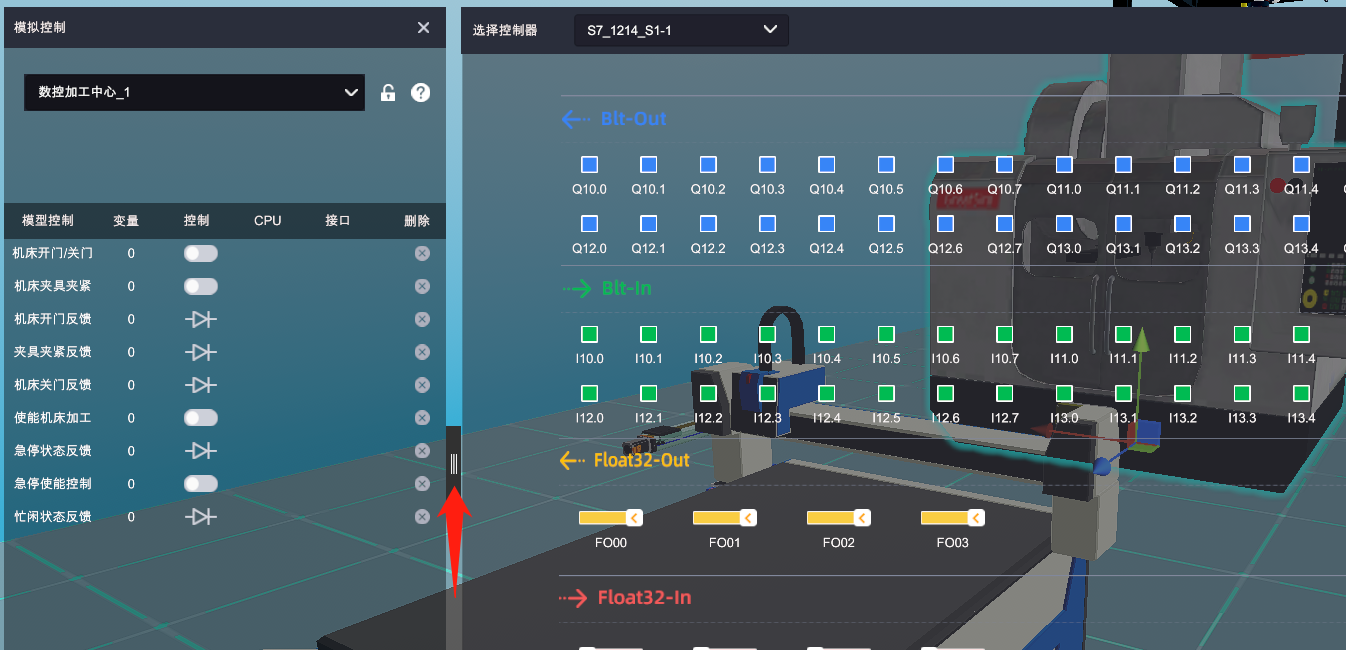
### 5.2模型控制功能说明
在选中模型后,按下显示控制按钮,可看到该模型的控制变量
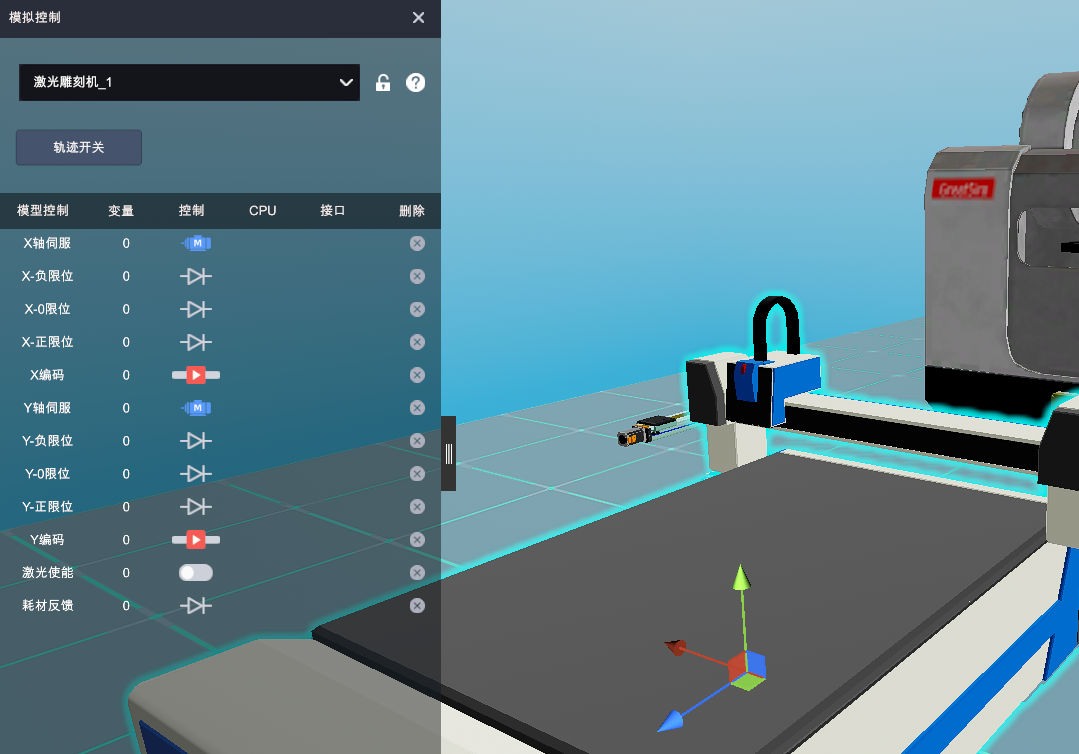
备注:
* 在运行模式下能够对每个变量进行模拟控制,如IO或者模拟量控制;
* 在非运行模式下,电机扩展按钮能够打开其对应的控制器面板,此时可进行拖拽接线;
*****
- 目录
- IOA互动仿真
- 认识IOA虚拟仿真
- IOA功能与导航
- 数字孪生资源
- 软件使用协议
- 注册与安装
- 注册与使用
- IOA安装及激活
- IOA操作及入门
- 概述
- 用户界面操作
- 基础操作
- 界面设置
- 屏幕录制
- 导航方式
- 快捷键与仿真
- 3D场景搭建
- 一般模型搭建
- 自定义模组拼接
- 电气控制箱拼接
- XYZ多轴机械手拼接
- 机器人吸盘、夹具拼接
- 自定义模型导入与使用
- 移动机器人场景搭建
- 建筑模型库
- 手动调试
- 模拟控制与调试
- 一般信号调试
- 工业机器人调试
- 自定义添加控制器
- 图形化Py-Teach控制器
- Py-R4控制器添加与控制
- Py-S4控制器添加与控制
- Py-R6控制器添加与控制
- 西门子PLC添加与控制
- 西门子实体PLC1214添加与控制
- 西门子虚拟PLC1214添加与控制
- 西门子虚拟PLC1512添加与控制
- 三菱PLC虚拟仿真
- 三菱PLC仿真器的使用说明
- 三菱PLC的添加与控制
- ZMC运动控制器
- VPLC运动视觉控制器
- KEBA工业机器人示教编程
- 纳博特机器人示教编程
- ABB机器人示教编程
- 遨博机器人示教编程
- 机器视觉与API
- Arduino-UNO单片机
- Arduino-MEGA单片机
- ESP32物联网单片机
- 虚拟电气接线
- 输入输出接口认识
- 控制器之间通讯
- 导出接线表
- VR仿真与多人互动
- PC多人互动
- VR多人互动
- APP多人互动
- IOA模型库概览
- 物流传输模型库说明
- 机械零件模型说明
- 机电单元模型说明
- 传感交互模型说明
- 人机交互模型
- 传感器模型
- 虚拟继电模型
- 机器人模型
- 物料模型库
- 移动机器人
- 建筑模型
- 虚实仿真教程
- 西门子S7-1200编程仿真
- 西门子S7-1500编程仿真
- 三菱虚拟PLC编程仿真
- KEBA工业机器人编程仿真
- 纳博特机器人编程仿真
- ABB机器人编程仿真
- Py-Teach通用示教器仿真教程
- Arduino-uno编程仿真
- Arduino-mega编程仿真
- ESP32物联网单片机编程仿真
- 机器视觉API及编程
- 正运动ZMC308编程仿真
- IOA硬件商城
- IOA产品概述
- 西门子PLC
- 运动控制系统
- KEBA机器人
- IOA孪生六轴机器人套装