
[TOC]
</div><div><br></div><div><br>
## **1、打开场景**
若您想打开已有的IOA场景文件,只需点击系统栏中“**文件**”,在弹出的菜单中点击“**打开**”,选择需要打开的本地场景文件。
IOA官网上传有大量配备好的场景文件,您可以免费下载使用,也可以继续拓展这些场景:[工程中心](http://www.ioaol.com/engineering)
*****
</div><div><br></div><div><br>
## **2、新建场景**
IOA包含大量常见的工业设备零件。您可以新建场景来将完成一个属于自己的虚拟工厂。
</div><div><br>
### (1) **新建场景**
点击系统栏中“**文件**”按钮,在弹出的菜单中点击“**新建**”,系统弹出“**提示**”窗口,点击“**是**”,系统将生成一个新的场景文件。
*****
</div><div><br>
### (2) **设备的添加**
编辑时,应使用在工具栏上的“**飞行模式**”。如果“**模型库**”不可见,请单击右上角的“模型库” 图标。
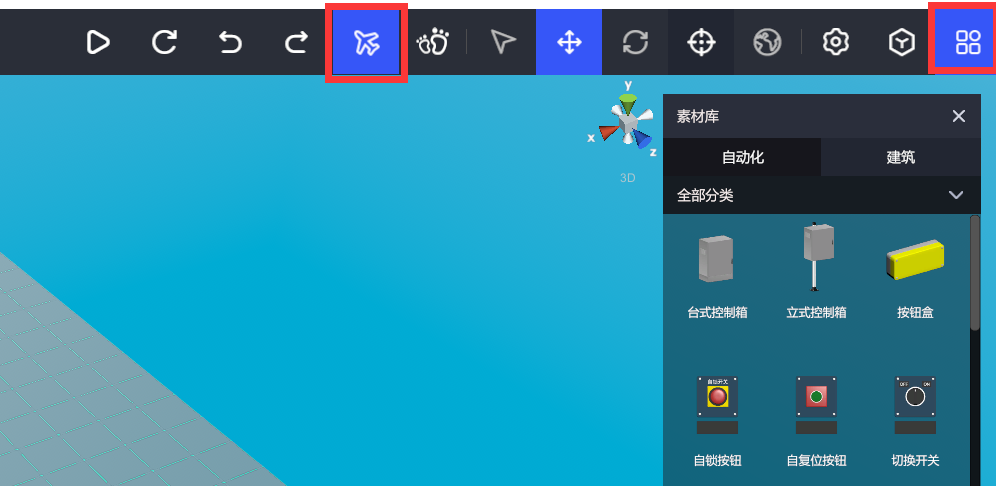
当使用自动化模型库时:您只需使用鼠标左键拖拽模型库中的设备模型到3D编辑区即可完成设备的添加;
当使用建筑模型库时:鼠标左键点击建筑模型,然后点击3D编辑区即可添加,可以对建筑模型可吸附式一个个的快速搭建,点击鼠标右键取消。
</div><div><br>
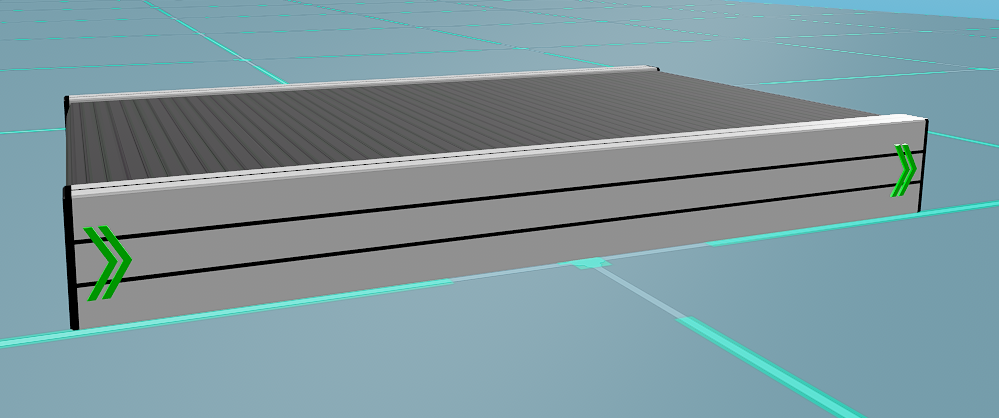
在这里分别选择“自动化模型库”下,“物流传输”中的“PV大皮带”,“机器人”中的“ER3-600+A”以及“建筑模型库”中的“矮紫模块”。创建新零件时,它会自动变为选中状态,拖动选定的零件放在您想要的位置。
注意到,与大多数其他部件一样,皮带线上有一个绿色箭头指示默认流动方向。
*****
</div><div><br>
### (3)**模型设置修改**
选中PV大皮带,单击工具栏“模型配置”按钮,界面弹出“模型设置界面”,能够对模型进行位置角度、尺寸、性能和三视图查看等基本操作。
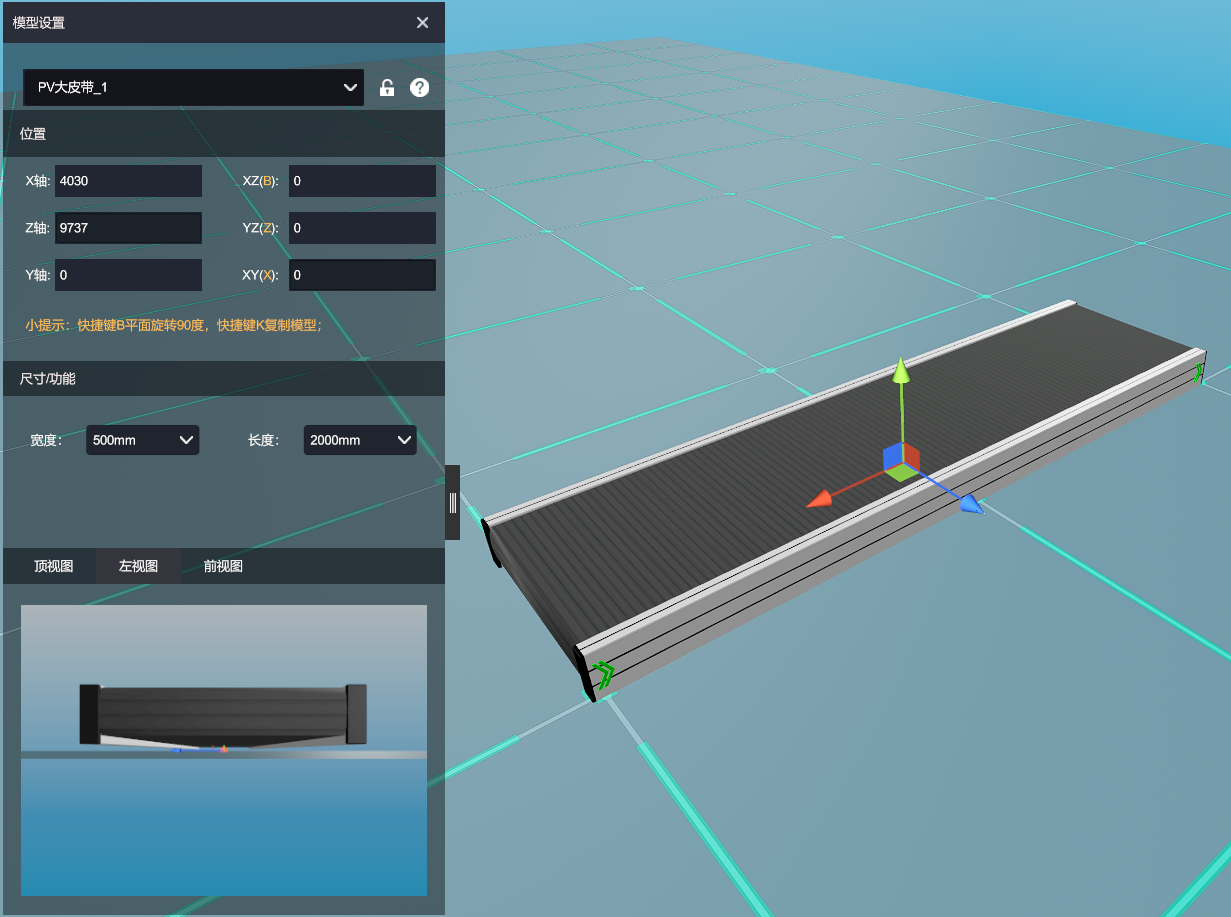
我们这这里修改PV大皮带的长度为2000mm。
备注:
* 模型设置页码是在非运行模式下点击模型设置按钮打开;
* 模型设置多用在3D布局环节之中使用;
* 并不是所有模型的尺寸可以更改,每个模型具有其特定的设置选项
* 通过输入框可改变模型坐标和角度
*****
</div><div><br>
### (4)**完善场景**
在这里我们将使用到导航球
在模型工程搭建的时候,需要频繁对准和切换,这时候需要用到3D导航球,可快速切换2D与3D效果,查看各个视角与应用的效果,这个方法在进行场景设计时候非常有效。
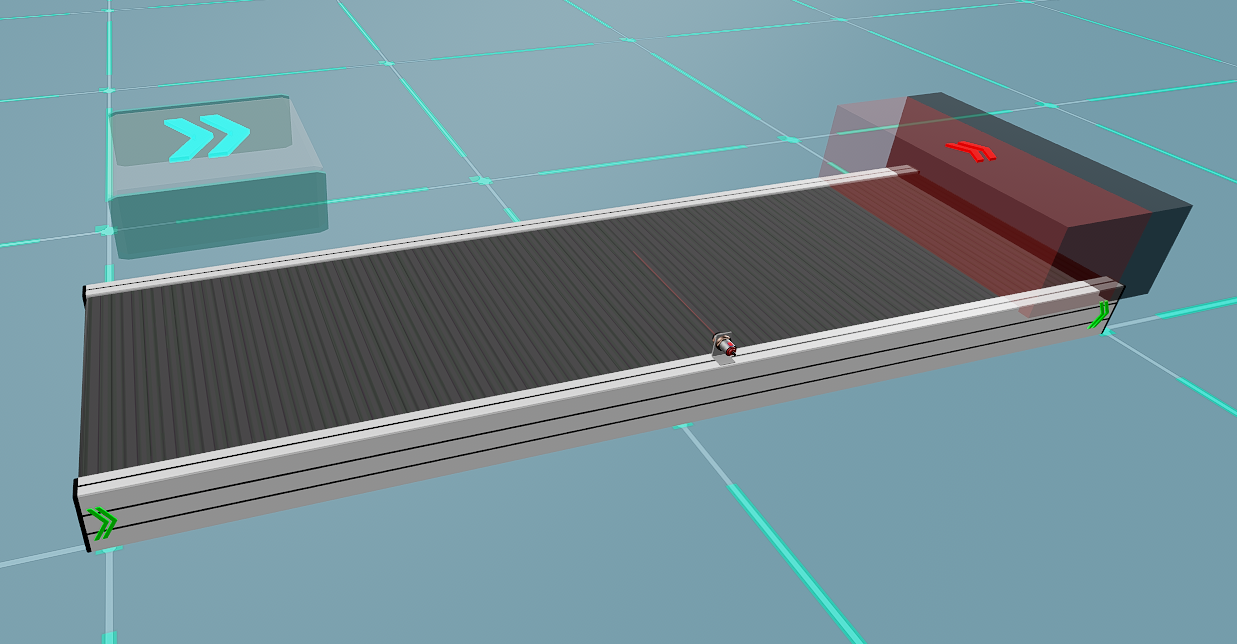
我们在场景中添加一个“物料耗材”中的“”几何模块生成”,将它的截面大小设置为240*240,颜色为随机。一个“消失箭头”,宽度设置为600mm,放置在皮带线的最右方,用以消失物料。以及一个“漫反射开关”,可以用这个漫反射开关实现计数等功能。如下图,我们完成一个简单的物料计数场景。
</div><div><br>
### (5) **保存场景**
待您完成场景搭建完成后,点击系统栏中“**文件**”,在弹出的菜单中点击“**保存**”,在弹出的“**保存文件**”界面选择保存位置并命名文件。
*****
</div><div><br></div><div><br>
## **3、手动调试**
建议您在使用外部控制器(例如PLC)控制场景之前,先对其进行手动测试。这样,您可以确保场景布局按预期工作。
作为传感器或执行器的任何部件都至少具有一个控制接口。可以接收三种不同的信号输入:布尔值用于开/关值,浮点型用于模拟值(实数),以及伺服驱动驱动伺服电机。
在手动控制场景中,您可以手动改变执行器的接口数据,模拟来自控制器的一个值。
使用在第2步中创建的场景,尝试使用皮带线运输产生的物料,当漫反射开关检测到物料时输出的DI信号为1。
(1)通过快捷键“**F5**”或点击工具栏“**开始/停止**”按钮,切换到“运行”模式。
备注:
> 运行模式下能够对设备进行模拟控制以及虚实连接控制;
>停止模式下能够对设备进行移动旋转、以及电气接线配置;
(2)单击工具栏”**显示控制**“按钮,显示模拟控制界面。
(3)点击编辑区的皮带线,则显示PV大皮带的接口界面,点击”使能"控制按钮,打开使能,点击“速度控制”可改变皮带线速度。同样的打开几何模块生成的造物使能。查看漫反射开关输出情况。
</div><div><br></div><div><br>
## **4、控制器控制**
现在,您已经创建了虚拟工厂场景,并完成了手动调试,是时候使用控制器对其进行控制了。首先,您应该了解什么是I/O驱动程序以及如何使用它们。
I/O驱动程序是IOA的内置功能,负责与外部控制器通讯。IOA包含许多I/O驱动程序,每个驱动程序用于一种特定技术。您可以根据要使用的控制器在IOA中选择一个驱动程序。接下来,配置此驱动程序,以便它知道如何与控制器通讯以及如何从中读取和写入I/O。
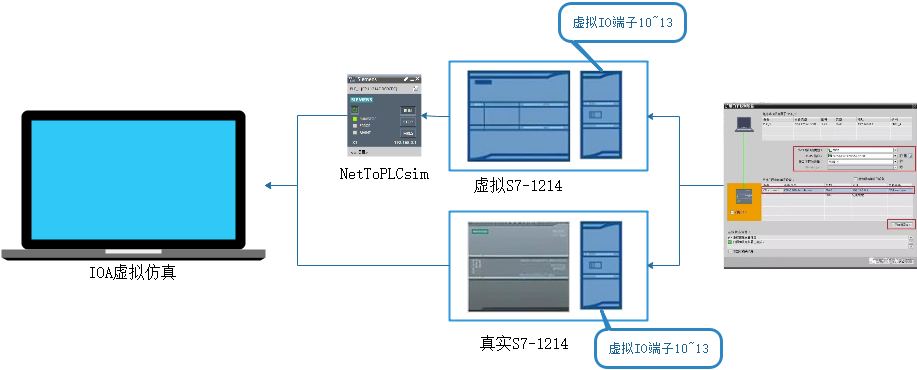
例如,本教程展示了如何使用西门子S7-1200 PLC。同样的此处描述的大多数步骤也适用于其他驱动程序。
*****
### (1) **添加控制器**
IOA支持多种控制器,我们以西门子S7-1200控制器为例
点击系统菜单栏中的“**控制器**”,在弹出的“**添加控制器**”界面点击“**+添加**”按钮。
控制器类别选择“**工业PLC**”,控制器型号为“**S7_1214_S1**”,点击“**确定**”,即添加完成。
*****
</div><div><br>
### (2)**配置接线**
添加控制器之后,便可以使用控制器的输入输出接口控制模型,我们以PV大皮带为例:
选中皮带线,点击菜单栏“**显示控制**”按钮,将显示PV大皮带的“**模拟控制**”界面,点击界面右侧的**弹出按钮**,将S7_1214_S1的输出点“**Q10.0**”拖拽到PV大皮带的使能开关处。若想删除接线,点击“**×**”号即可
*****
</div><div><br>
设备完成接线,并完成PLC控制程序后,设置为“**运行模式**”并测试PLC逻辑。
具体的各类控制器的控制方法见**虚实仿真教程**
- 目录
- IOA互动仿真
- 认识IOA虚拟仿真
- IOA功能与导航
- 数字孪生资源
- 软件使用协议
- 注册与安装
- 注册与使用
- IOA安装及激活
- IOA操作及入门
- 概述
- 用户界面操作
- 基础操作
- 界面设置
- 屏幕录制
- 导航方式
- 快捷键与仿真
- 3D场景搭建
- 一般模型搭建
- 自定义模组拼接
- 电气控制箱拼接
- XYZ多轴机械手拼接
- 机器人吸盘、夹具拼接
- 自定义模型导入与使用
- 移动机器人场景搭建
- 建筑模型库
- 手动调试
- 模拟控制与调试
- 一般信号调试
- 工业机器人调试
- 自定义添加控制器
- 图形化Py-Teach控制器
- Py-R4控制器添加与控制
- Py-S4控制器添加与控制
- Py-R6控制器添加与控制
- 西门子PLC添加与控制
- 西门子实体PLC1214添加与控制
- 西门子虚拟PLC1214添加与控制
- 西门子虚拟PLC1512添加与控制
- 三菱PLC虚拟仿真
- 三菱PLC仿真器的使用说明
- 三菱PLC的添加与控制
- ZMC运动控制器
- VPLC运动视觉控制器
- KEBA工业机器人示教编程
- 纳博特机器人示教编程
- ABB机器人示教编程
- 遨博机器人示教编程
- 机器视觉与API
- Arduino-UNO单片机
- Arduino-MEGA单片机
- ESP32物联网单片机
- 虚拟电气接线
- 输入输出接口认识
- 控制器之间通讯
- 导出接线表
- VR仿真与多人互动
- PC多人互动
- VR多人互动
- APP多人互动
- IOA模型库概览
- 物流传输模型库说明
- 机械零件模型说明
- 机电单元模型说明
- 传感交互模型说明
- 人机交互模型
- 传感器模型
- 虚拟继电模型
- 机器人模型
- 物料模型库
- 移动机器人
- 建筑模型
- 虚实仿真教程
- 西门子S7-1200编程仿真
- 西门子S7-1500编程仿真
- 三菱虚拟PLC编程仿真
- KEBA工业机器人编程仿真
- 纳博特机器人编程仿真
- ABB机器人编程仿真
- Py-Teach通用示教器仿真教程
- Arduino-uno编程仿真
- Arduino-mega编程仿真
- ESP32物联网单片机编程仿真
- 机器视觉API及编程
- 正运动ZMC308编程仿真
- IOA硬件商城
- IOA产品概述
- 西门子PLC
- 运动控制系统
- KEBA机器人
- IOA孪生六轴机器人套装