
[TOC]
## **1、软件及工程下载**
>KEBA软件下载地址[链接](http://www.ioaol.com/down#There)
>KEBA软件安装教程[链接](http://www.ioaol.com/coursesDetails?courseId=375)
******
## 2、**软件模拟仿真**
IOA虚拟工厂与虚拟KEBA机器人连接步骤说明点击[链接](https://www.bilibili.com/video/BV1Dp4y1W7MK/)
### (1)拖拽使用的机器人型号至仿真环境
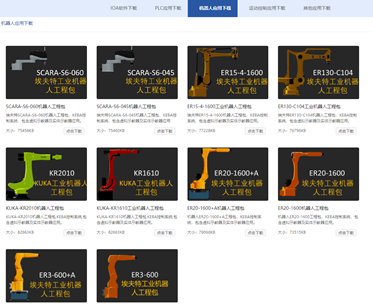
在右侧素材库机器人分栏里选择要使用的机器人型号,将其拖拽至仿真环境中,适当进行位置校准(以添加一个六轴机器人ER20-1600为例)。
### (2)选择合适的机器人控制器型号
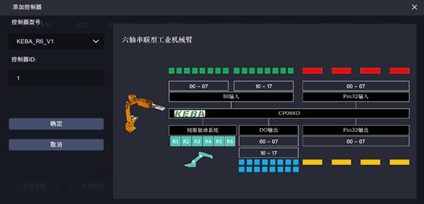
在上部菜单栏选择控制器一栏,点击添加,依次进行选择:控制器类别为工业机器人,控制器型号为KEBA_R6_V1,控制器ID为1。

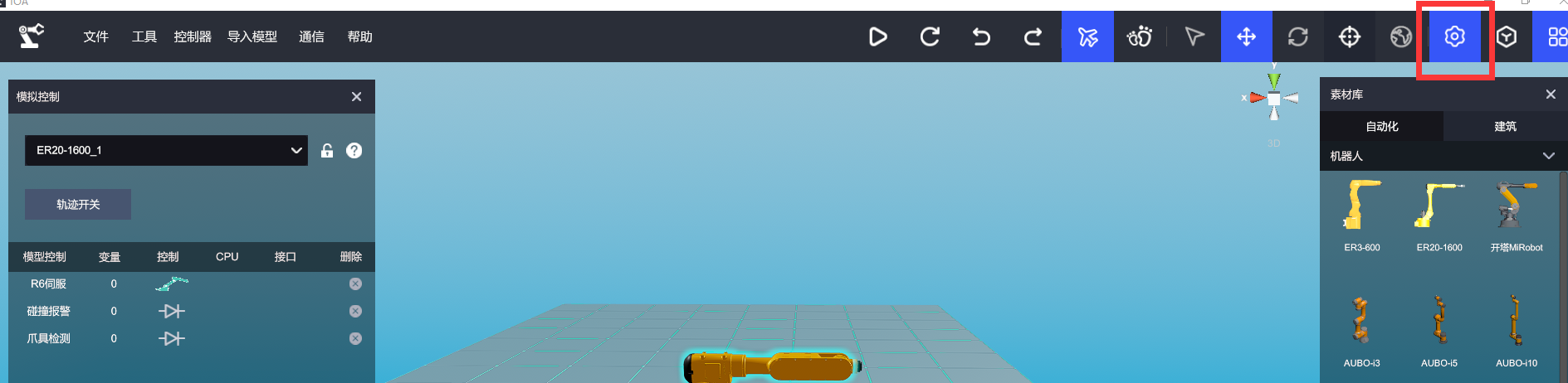
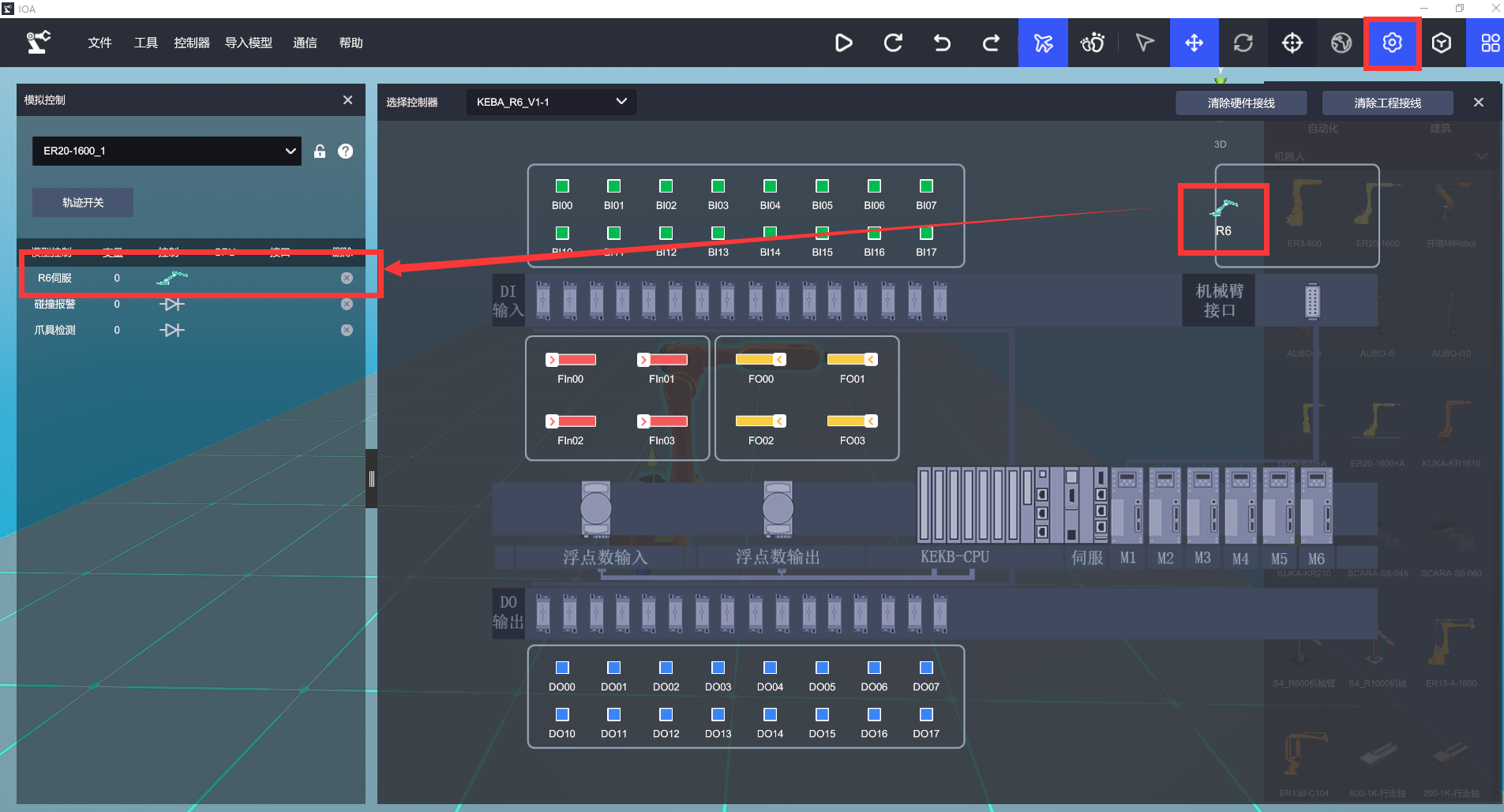
### (3)机器人配线
点击上部菜单栏右侧的显示控制,点击模拟控制右侧点进行虚拟配线,拖拽R6信号至模拟控制的R6伺服接口,完成机器人的配线操作。
### (4)打开KEBA虚拟示教器平台
1)打开机器人固件,选择选择并打开你的机器人工程,在下载地址:[链接](http://www.realmaxedu.com/down#There)中下载KEBA机器人工程包。
在工程包中,具有多种类型和型号机器人工程,需要选择固定的机器人工程并进行编译和仿真。在此例中我们采用Effort-ER20-1600的20KG机械臂控制器;
在文件夹里,依次打开虚拟机系统固件 >ER20-1600_v20201002_s文件夹,双击打开Axis6_demo.project工程。
2)编译,打开工程,点击编译图标,编译工程(也可以点击“Build”菜单下的“Rebuild”选项),确保工程没有错误。
选择虚拟仿真,创建六轴虚拟仿真工程。
3)启动六轴虚拟仿真。
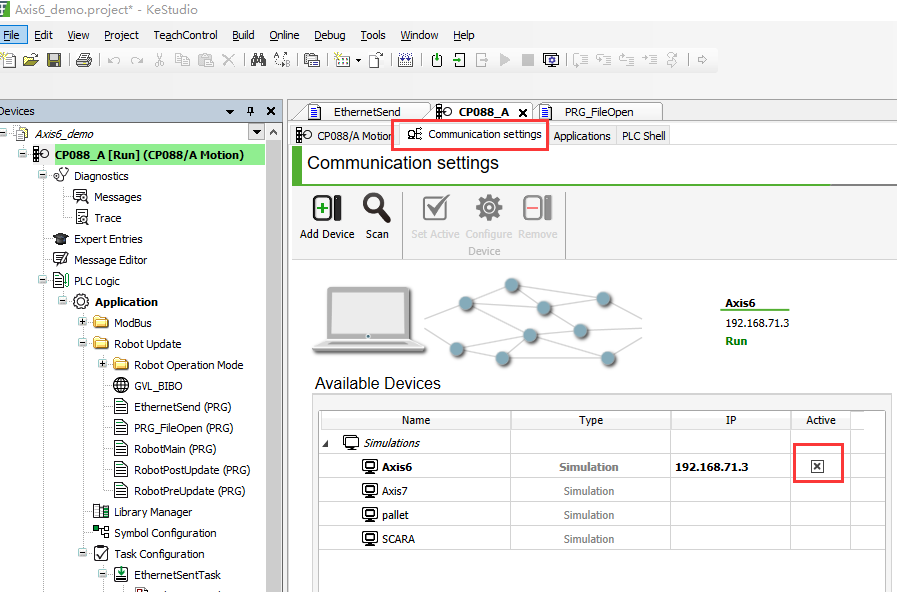
4)激活虚拟机,在“Communication settings”窗口中,先点击图中激活框,取消激活,再点击一次重新激活。
确保Axis6为 RUN 状态。
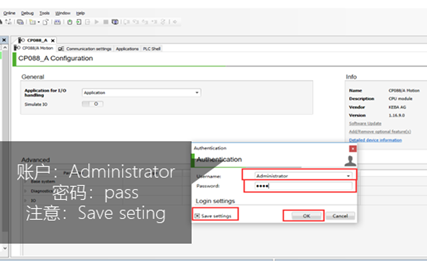
5)下载,点击菜单栏的下载按钮,输入Administrator账户以及pass密码,保存输入,点击OK,并依次点击OK进行下载,下载时间大约2~5分钟;
注意:(首次运行或更换机械臂种类才需要下载,已经使用过该机器人则不需要重复下载)
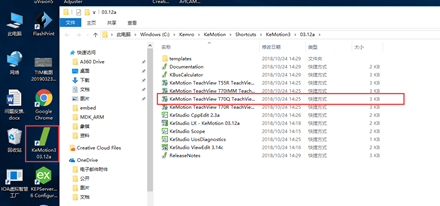
6)开启虚拟示教器,双击桌面上已经安装完成的KeMotion3 03.12a图标选择“KeMotion TeachView T70Q TeachView_3.14a”图标,运行虚拟示教器。
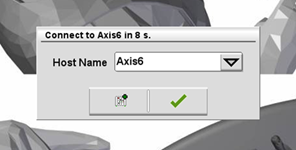
7)运行虚拟示教器,运行之后会弹出一个命令行窗口,等待一段时间会运行虚拟示教器界面,在界面中选择Axis6设备,点击右侧的对号即可。
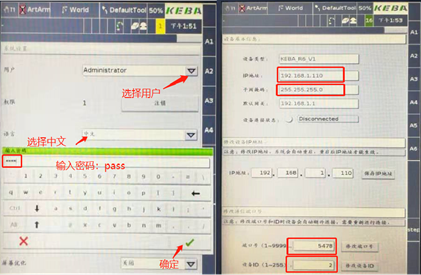
进入后,选择用户为Administrator,密码为pass。
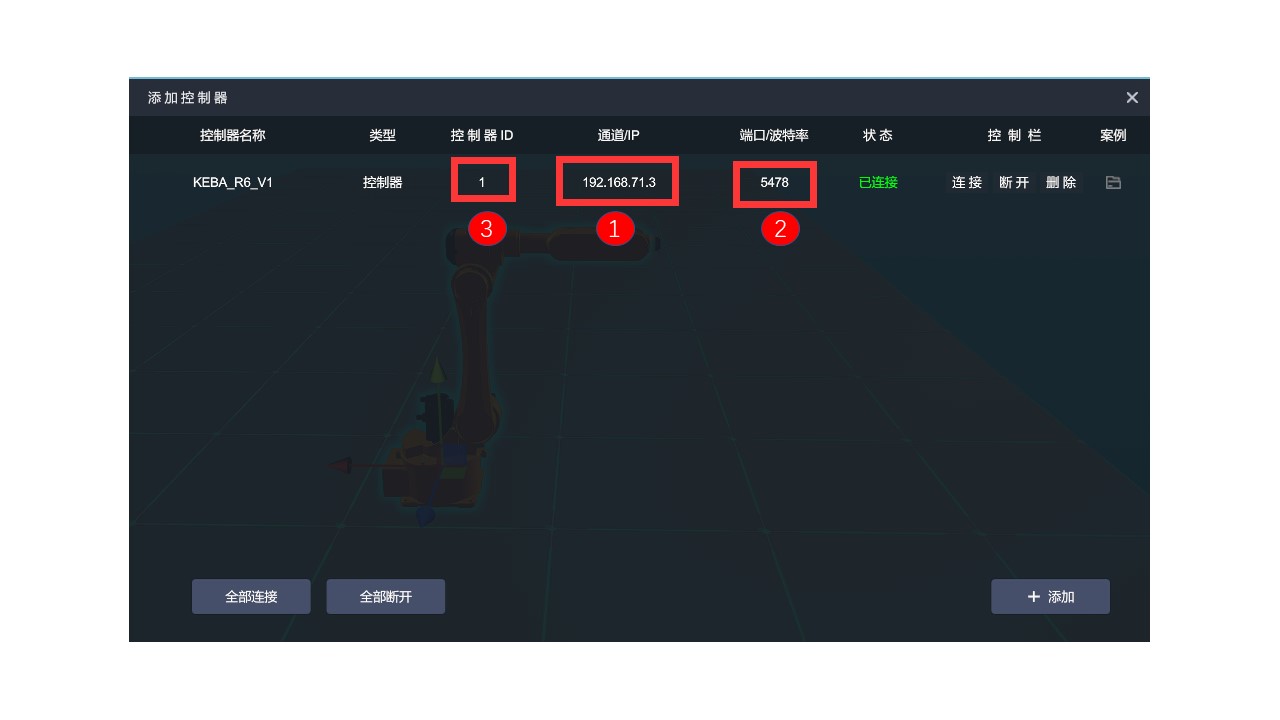
8)在IOA软件中连接虚拟控制器,控制器ID、IP地址、端口号与虚拟示教器保持一致,完成虚拟工厂到虚拟控制器的配置映射。

********
## 3、硬件仿真
IOA虚拟工厂与真实KEBA机器人连接步骤说明点击[链接](https://www.bilibili.com/video/BV1Zv411Y7Wa/)
### (1)接入方法讲解
IOA软件与真实KEBA示教器连接仿真步骤具体如下(以六轴机器人为例):
1)打开IOA虚拟工厂仿真软件,选择ER20-1600型号六轴工业机器人拖拽至仿真页面。

2)打开控制箱电源,将KEBA-R6-V1 控制箱电源接口使用品字型插头连接到220V电源上,并按下船型开关接通电气柜的电源;
使用RJ45水晶头通讯电缆将控制柜与PC端网口进行连接(确定电脑的默认IP地址为静态IP,如192.168.1.15);
将KEBA示教器电缆上的航插连接到KEBA-R6-V1 控制箱的示教器接口上。

3)登录示教器Administrator,在示教器中选择登录Administrator,密码pass;
设备信息获取:按下示教器左上角的菜单按钮,进入获取设备信息界面,读取控制器的IP地址,端口号及设备ID。
4)添加控制器,点击控制器图标,打开添加控制器画面,添加KEBA-R6-V1控制器;
填写ID以及IP地址,点击连接按钮(ID与IP地址在示教器的设备信息画面有显示)。
5)配置接线,通过虚拟工厂虚拟接线,配置相应的六轴机器人进行虚实控制示教编程;
选中机器人→点击配置接线→将机器人拖入模拟控制→点击运行。

### (2)如何更新KEBA控制器固件
登录IOA官网下载最新版KEBA控制器系统固件。[点击下载](http://www.ioaol.com/down#There)
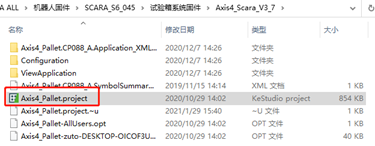
选择相应的机器人控制器工程包固件下载,将试验箱固件中Axis4_Pallet.project打开(以SCARA_S6_045为例)。
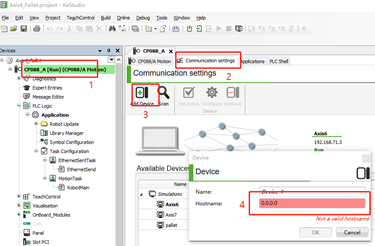
选择CP088_A打开,选择Communication settings里的Add Device,输入真实KEBA示教器的IP地址。
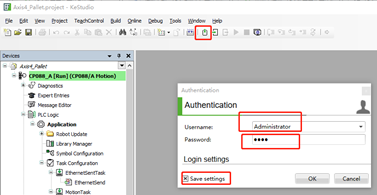
点击下载按钮,填写Username为Administrator,Password为pass,选择Save settings。
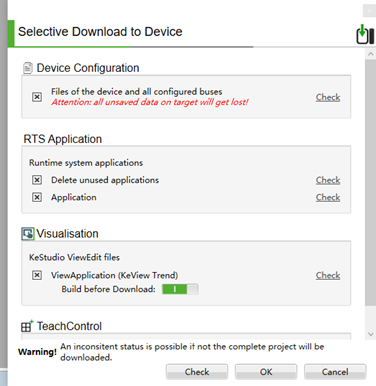
点击OK即可将SCARA_S6_045型号控制器固件下载至KEBA示教器中。
- 目录
- IOA互动仿真
- 认识IOA虚拟仿真
- IOA功能与导航
- 数字孪生资源
- 软件使用协议
- 注册与安装
- 注册与使用
- IOA安装及激活
- IOA操作及入门
- 概述
- 用户界面操作
- 基础操作
- 界面设置
- 屏幕录制
- 导航方式
- 快捷键与仿真
- 3D场景搭建
- 一般模型搭建
- 自定义模组拼接
- 电气控制箱拼接
- XYZ多轴机械手拼接
- 机器人吸盘、夹具拼接
- 自定义模型导入与使用
- 移动机器人场景搭建
- 建筑模型库
- 手动调试
- 模拟控制与调试
- 一般信号调试
- 工业机器人调试
- 自定义添加控制器
- 图形化Py-Teach控制器
- Py-R4控制器添加与控制
- Py-S4控制器添加与控制
- Py-R6控制器添加与控制
- 西门子PLC添加与控制
- 西门子实体PLC1214添加与控制
- 西门子虚拟PLC1214添加与控制
- 西门子虚拟PLC1512添加与控制
- 三菱PLC虚拟仿真
- 三菱PLC仿真器的使用说明
- 三菱PLC的添加与控制
- ZMC运动控制器
- VPLC运动视觉控制器
- KEBA工业机器人示教编程
- 纳博特机器人示教编程
- ABB机器人示教编程
- 遨博机器人示教编程
- 机器视觉与API
- Arduino-UNO单片机
- Arduino-MEGA单片机
- ESP32物联网单片机
- 虚拟电气接线
- 输入输出接口认识
- 控制器之间通讯
- 导出接线表
- VR仿真与多人互动
- PC多人互动
- VR多人互动
- APP多人互动
- IOA模型库概览
- 物流传输模型库说明
- 机械零件模型说明
- 机电单元模型说明
- 传感交互模型说明
- 人机交互模型
- 传感器模型
- 虚拟继电模型
- 机器人模型
- 物料模型库
- 移动机器人
- 建筑模型
- 虚实仿真教程
- 西门子S7-1200编程仿真
- 西门子S7-1500编程仿真
- 三菱虚拟PLC编程仿真
- KEBA工业机器人编程仿真
- 纳博特机器人编程仿真
- ABB机器人编程仿真
- Py-Teach通用示教器仿真教程
- Arduino-uno编程仿真
- Arduino-mega编程仿真
- ESP32物联网单片机编程仿真
- 机器视觉API及编程
- 正运动ZMC308编程仿真
- IOA硬件商城
- IOA产品概述
- 西门子PLC
- 运动控制系统
- KEBA机器人
- IOA孪生六轴机器人套装