
# 九、TensorFlow 和 Keras 中的 CNN
**卷积神经网络**(**CNN**)是一种特殊的前馈神经网络,在其架构中包含卷积和汇聚层。也称为 ConvNets,CNN 架构的一般模式是按以下顺序包含这些层:
1. 完全连接的输入层
2. 卷积,池化和全连接层的多种组合
3. 完全连接的输出层,具有 softmax 激活函数
CNN 架构已被证明在解决涉及图像学习的问题(例如图像识别和对象识别)方面非常成功。
在本章中,我们将学习与卷积网络相关的以下主题:
* 理解卷积
* 理解池化
* CNN 架构模式 - LeNet
* 用于 MNIST 数据集的 LeNet
* 使用 TensorFlow 和 MNIST 的 LeNet
* 使用 Keras 和 MNIST 的 LeNet
* 用于 CIFAR 数据集的 LeNet
* 使用 TensorFlow 和 CIFAR10 的 LeNet CNN
* 使用 Keras 和 CIFAR10 的 LeNet CNN
让我们从学习卷积网络背后的核心概念开始。
# 理解卷积
**卷积**是 CNN 架构背后的核心概念。简单来说,卷积是一种数学运算,它结合了两个来源的信息来产生一组新的信息。具体来说,它将一个称为内核的特殊矩阵应用于输入张量,以产生一组称为特征图的矩阵。可以使用任何流行的算法将内核应用于输入张量。
生成卷积矩阵的最常用算法如下:
```py
N_STRIDES = [1,1]
1\. Overlap the kernel with the top-left cells of the image matrix.
2\. Repeat while the kernel overlaps the image matrix:
2.1 c_col = 0
2.2 Repeat while the kernel overlaps the image matrix:
2.1.1 set c_row = 0 2.1.2 convolved_scalar = scalar_prod(kernel, overlapped cells)
2.1.3 convolved_matrix(c_row,c_col) = convolved_scalar
2.1.4 Slide the kernel down by N_STRIDES[0] rows.
2.1.5 c_row = c_row + 1
2.3 Slide the kernel to (topmost row, N_STRIDES[1] columns right)
2.4 c_col = c_col + 1
```
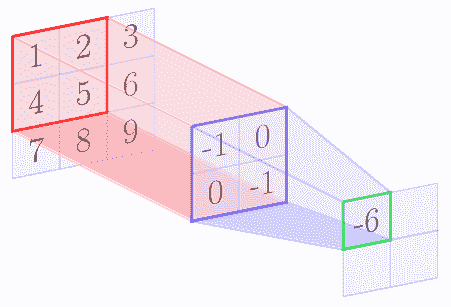
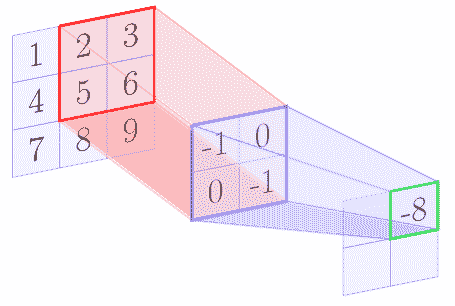
例如,我们假设核矩阵是`2 x 2`矩阵,输入图像是`3 x 3`矩阵。下图逐步显示了上述算法:
| | |
| --- | --- |
|  |  |
| 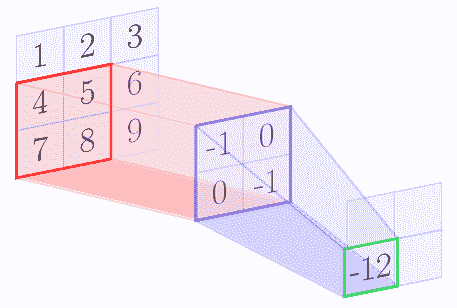 | 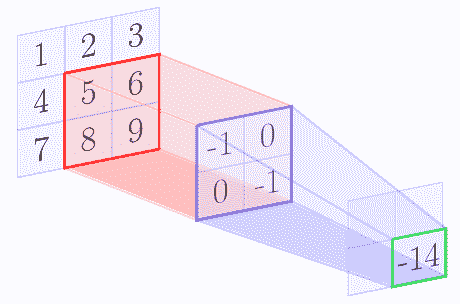 |
在卷积操作结束时,我们得到以下特征图:
| | |
| --- | --- |
| -6 | -8 |
| -12 | -14 |
在上面的示例中,与卷积的原始输入相比,生成的特征映射的大小更小。通常,特征图的大小减小(内核大小减 1)。因此,特征图的大小为:

**三维张量**
对于具有额外深度尺寸的三维张量,您可以将前面的算法视为应用于深度维度中的每个层。将卷积应用于 3D 张量的输出也是 2D 张量,因为卷积运算添加了三个通道。
**步幅**
数组`N_STRIDES`中的**步长**是您想要将内核滑过的行或列的数字。在我们的例子中,我们使用了 1 的步幅。如果我们使用更多的步幅,那么特征图的大小将根据以下等式进一步减小:

**填充**
如果我们不希望减小特征映射的大小,那么我们可以在输入的所有边上使用填充,使得特征的大小增加填充大小的两倍。使用填充,可以按如下方式计算特征图的大小:

TensorFlow 允许两种填充:`SAME`或`VALID`。 `SAME`填充意味着添加填充,使输出特征图与输入特征具有相同的大小。 `VALID`填充意味着没有填充。
应用前面提到的卷积算法的结果是特征图,是原始张量的滤波版本。例如,特征图可能只有从原始图像中过滤出的轮廓。因此,内核也称为过滤器。对于每个内核,您将获得单独的 2D 特征图。
根据您希望网络学习的特征,您必须应用适当的过滤器来强调所需的特征。 但是,使用 CNN,模型可以自动了解哪些内核在卷积层中最有效。
**TensorFlow** 中的卷积运算
TensorFlow 提供实现卷积算法的卷积层。例如,具有以下签名的`tf.nn.conv2d()`操作:
```py
tf.nn.conv2d(
input,
filter,
strides,
padding,
use_cudnn_on_gpu=None,
data_format=None,
name=None
)
```
`input`和`filter`表示形状`[batch_size, input_height, input_width, input_depth]`的数据张量和形状`[filter_height, filter_width, input_depth, output_depth]`的核张量。内核张量中的`output_depth`表示应该应用于输入的内核数量。`strides`张量表示每个维度中要滑动的单元数。如上所述,`padding`是有效的或相同的。
[您可以在此链接中找到有关 TensorFlow 中可用卷积操作的更多信息](https://www.tensorflow.org/api_guides/python/nn#Convolution)
[您可以在此链接中找到有关 Keras 中可用卷积层的更多信息](https://keras.io/layers/convolutional/)
此链接提供了卷积的详细数学解释:
<http://colah.github.io/posts/2014-07-Understanding-Convolutions/>
<http://ufldl.stanford.edu/tutorial/supervised/FeatureExtractionUsingConvolution/>
<http://colah.github.io/posts/2014-07-Understanding-Convolutions/>
卷积层或操作将输入值或神经元连接到下一个隐藏层神经元。每个隐藏层神经元连接到与内核中元素数量相同数量的输入神经元。所以在前面的例子中,内核有 4 个元素,因此隐藏层神经元连接到输入层的 4 个神经元(`3×3` 个神经元中)。在我们的例子中,输入层的 4 个神经元的这个区域被称为 CNN 理论中的**感受域**。
卷积层具有每个内核的单独权重和偏差参数。权重参数的数量等于内核中元素的数量,并且只有一个偏差参数。内核的所有连接共享相同的权重和偏差参数。因此在我们的例子中,将有 4 个权重参数和 1 个偏差参数,但如果我们在卷积层中使用 5 个内核,则总共将有`5 x 4`个权重参数和`5 x 1`个偏差参数(每个特征图 4 个权重,1 个偏差)。
# 理解池化
通常,在卷积操作中,应用几个不同的内核,这导致生成若干特征映射。因此,卷积运算导致生成大尺寸数据集。
例如,将形状为`3 x 3 x 1`的内核应用于具有`28 x 28 x 1`像素形状的图像的 MNIST 数据集,可生成形状为`26 x 26 x 1`的特征映射。如果我们在其中应用 32 个这样的滤波器卷积层,则输出的形状为`32 x 26 x 26 x 1`,即形状为`26 x 26 x 1`的 32 个特征图。
与形状为`28 x 28 x 1`的原始数据集相比,这是一个庞大的数据集。因此,为了简化下一层的学习,我们应用池化的概念。
**聚合**是指计算卷积特征空间区域的聚合统计量。两个最受欢迎的聚合统计数据是最大值和平均值。应用最大池化的输出是所选区域的最大值,而应用平均池的输出是区域中数字的平均值。
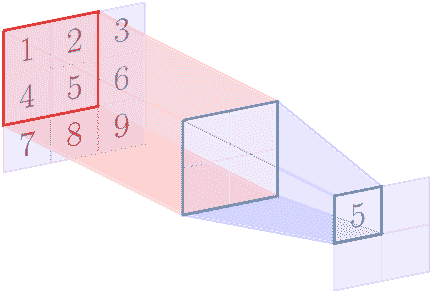
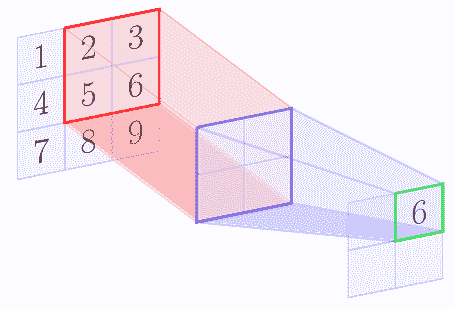
例如,假设特征图的形状为`3 x 3`,池化区域形状为`2 x 2`。以下图像显示了使用`[1, 1]`的步幅应用的最大池操作:
| | |
| --- | --- |
|  |  |
| 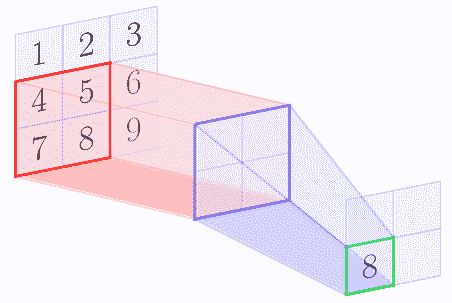 | 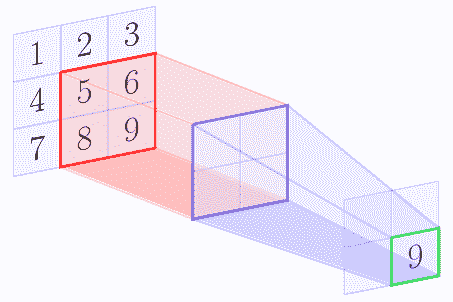 |
在最大池操作结束时,我们得到以下矩阵:
| | |
| --- | --- |
| 5 | 6 |
| 8 | 9 |
通常,池化操作应用非重叠区域,因此步幅张量和区域张量被设置为相同的值。
例如,TensorFlow 具有以下签名的`max_pooling`操作:
```py
max_pool(
value,
ksize,
strides,
padding,
data_format='NHWC',
name=None
)
```
`value`表示形状`[batch_size, input_height, input_width, input_depth]`的输入张量。对矩形形状区域`ksize`执行合并操作。这些区域被形状`strides`抵消。
[您可以在此链接中找到有关 TensorFlow 中可用的池化操作的更多信息](https://www.tensorflow.org/api_guides/python/nn#Pooling)
[有关 Keras 中可用池化的更多信息,请访问此链接](https://keras.io/layers/pooling/)
[此链接提供了池化的详细数学说明](http://ufldl.stanford.edu/tutorial/supervised/Pooling/)
# CNN 架构模式 - LeNet
LeNet 是实现 CNN 的流行架构模式。在本章中,我们将学习如何通过按以下顺序创建层来构建基于 LeNet 模式的 CNN 模型:
1. 输入层
2. 卷积层 1,它产生一组特征映射,具有 ReLU 激活
3. 池化层 1 产生一组统计聚合的特征映射
4. 卷积层 2,其产生一组特征映射,具有 ReLU 激活
5. 池化层 2 产生一组统计聚合的特征映射
6. 完全连接的层,通过 ReLU 激活来展平特征图
7. 通过应用简单线性激活产生输出的输出层
**LeNet** 系列模型由 Yann LeCun 及其研究员介绍。有关 LeNet 系列模型的更多详细信息,[请访问此链接](http://yann.lecun.com/exdb/publis/pdf/lecun-01a.pdf)。
[Yann LeCun 通过此链接维护 LeNet 系列模型列表](http://yann.lecun.com/exdb/lenet/index.html)。
# 用于 MNIST 数据的 LeNet
您可以按照 Jupyter 笔记本中的代码`ch-09a_CNN_MNIST_TF_and_Keras`。
准备 MNIST 数据到测试和训练集:
```py
from tensorflow.examples.tutorials.mnist import input_data
mnist = input_data.read_data_sets(os.path.join('.','mnist'), one_hot=True)
X_train = mnist.train.images
X_test = mnist.test.images
Y_train = mnist.train.labels
Y_test = mnist.test.labels
```
# TensorFlow 中的用于 MNIST 的 LeNet CNN
在 TensorFlow 中,应用以下步骤为 MNIST 数据构建基于 LeNet 的 CNN 模型:
1. 定义超参数,以及 x 和 y 的占位符(输入图像和输出标签) :
```py
n_classes = 10 # 0-9 digits
n_width = 28
n_height = 28
n_depth = 1
n_inputs = n_height * n_width * n_depth # total pixels
learning_rate = 0.001
n_epochs = 10
batch_size = 100
n_batches = int(mnist.train.num_examples/batch_size)
# input images shape: (n_samples,n_pixels)
x = tf.placeholder(dtype=tf.float32, name="x", shape=[None, n_inputs])
# output labels
y = tf.placeholder(dtype=tf.float32, name="y", shape=[None, n_classes])
```
将输入 x 重塑为形状`(n_samples, n_width, n_height, n_depth)`:
```py
x_ = tf.reshape(x, shape=[-1, n_width, n_height, n_depth])
```
1. 使用形状为`4 x 4`的 32 个内核定义第一个卷积层,从而生成 32 个特征图。
* 首先,定义第一个卷积层的权重和偏差。我们使用正态分布填充参数:
```py
layer1_w = tf.Variable(tf.random_normal(shape=[4,4,n_depth,32],
stddev=0.1),name='l1_w')
layer1_b = tf.Variable(tf.random_normal([32]),name='l1_b')
```
* 接下来,用`tf.nn.conv2d`函数定义卷积层。函数参数`stride`定义了内核张量在每个维度中应该滑动的元素。维度顺序由`data_format`确定,可以是`'NHWC'`或`'NCHW'`(默认为`'NHWC'`)。
通常,`stride`中的第一个和最后一个元素设置为 1。函数参数`padding`可以是`SAME`或`VALID`。`SAME` `padding`表示输入将用零填充,以便在卷积后输出与输入的形状相同。使用`tf.nn.relu()`函数添加`relu`激活:
```py
layer1_conv = tf.nn.relu(tf.nn.conv2d(x_,layer1_w,
strides=[1,1,1,1],
padding='SAME'
) +
layer1_b
)
```
* 使用`tf.nn.max_pool()`函数定义第一个池化层。参数`ksize`表示使用`2×2×1`个区域的合并操作,参数`stride`表示将区域滑动`2×2×1`个像素。因此,区域彼此不重叠。由于我们使用`max_pool`,池化操作选择`2 x 2 x 1`区域中的最大值:
```py
layer1_pool = tf.nn.max_pool(layer1_conv,ksize=[1,2,2,1],
strides=[1,2,2,1],padding='SAME')
```
第一个卷积层产生 32 个大小为`28 x 28 x 1`的特征图,然后池化成`32 x 14 x 14 x 1`的数据。
1. 定义第二个卷积层,它将此数据作为输入并生成 64 个特征图。
* 首先,定义第二个卷积层的权重和偏差。我们用正态分布填充参数:
```py
layer2_w = tf.Variable(tf.random_normal(shape=[4,4,32,64],
stddev=0.1),name='l2_w')
layer2_b = tf.Variable(tf.random_normal([64]),name='l2_b')
```
* 接下来,用`tf.nn.conv2d`函数定义卷积层:
```py
layer2_conv = tf.nn.relu(tf.nn.conv2d(layer1_pool,
layer2_w,
strides=[1,1,1,1],
padding='SAME'
) +
layer2_b
)
```
* 用`tf.nn.max_pool`函数定义第二个池化层:
```py
layer2_pool = tf.nn.max_pool(layer2_conv,
ksize=[1,2,2,1],
strides=[1,2,2,1],
padding='SAME'
)
```
第二卷积层的输出形状为`64×14×14×1`,然后池化成`64×7×7×1`的形状的输出。
1. 在输入 1024 个神经元的完全连接层之前重新整形此输出,以产生大小为 1024 的扁平输出:
```py
layer3_w = tf.Variable(tf.random_normal(shape=[64*7*7*1,1024],
stddev=0.1),name='l3_w')
layer3_b = tf.Variable(tf.random_normal([1024]),name='l3_b')
layer3_fc = tf.nn.relu(tf.matmul(tf.reshape(layer2_pool,
[-1, 64*7*7*1]),layer3_w) + layer3_b)
```
1. 完全连接层的输出馈入具有 10 个输出的线性输出层。我们在这一层没有使用 softmax,因为我们的损失函数自动将 softmax 应用于输出:
```py
layer4_w = tf.Variable(tf.random_normal(shape=[1024, n_classes],
stddev=0.1),name='l)
layer4_b = tf.Variable(tf.random_normal([n_classes]),name='l4_b')
layer4_out = tf.matmul(layer3_fc,layer4_w)+layer4_b
```
这创建了我们保存在变量`model`中的第一个 CNN 模型:
```py
model = layer4_out
```
鼓励读者探索具有不同超参数值的 TensorFlow 中可用的不同卷积和池操作符。
为了定义损失,我们使用`tf.nn.softmax_cross_entropy_with_logits`函数,对于优化器,我们使用`AdamOptimizer`函数。您应该尝试探索 TensorFlow 中可用的不同优化器函数。
```py
entropy = tf.nn.softmax_cross_entropy_with_logits(logits=model, labels=y)
loss = tf.reduce_mean(entropy)
optimizer = tf.train.AdamOptimizer(learning_rate).minimize(loss)
```
最后,我们通过迭代`n_epochs`来训练模型,并且在`n_batches`上的每个周期列中,每批`batch_size`的大小:
```py
with tf.Session() as tfs:
tf.global_variables_initializer().run()
for epoch in range(n_epochs):
total_loss = 0.0
for batch in range(n_batches):
batch_x,batch_y = mnist.train.next_batch(batch_size)
feed_dict={x:batch_x, y: batch_y}
batch_loss,_ = tfs.run([loss, optimizer],
feed_dict=feed_dict)
total_loss += batch_loss
average_loss = total_loss / n_batches
print("Epoch: {0:04d} loss = {1:0.6f}".format(epoch,average_loss))
print("Model Trained.")
predictions_check = tf.equal(tf.argmax(model,1),tf.argmax(y,1))
accuracy = tf.reduce_mean(tf.cast(predictions_check, tf.float32))
feed_dict = {x:mnist.test.images, y:mnist.test.labels}
print("Accuracy:", accuracy.eval(feed_dict=feed_dict))
```
我们得到以下输出:
```py
Epoch: 0000 loss = 1.418295
Epoch: 0001 loss = 0.088259
Epoch: 0002 loss = 0.055410
Epoch: 0003 loss = 0.042798
Epoch: 0004 loss = 0.030471
Epoch: 0005 loss = 0.023837
Epoch: 0006 loss = 0.019800
Epoch: 0007 loss = 0.015900
Epoch: 0008 loss = 0.012918
Epoch: 0009 loss = 0.010322
Model Trained.
Accuracy: 0.9884
```
现在,与我们在前几章中看到的方法相比,这是一个非常好的准确率。从图像数据中学习 CNN 模型是不是很神奇?
# Keras 中的用于 MNIST 的 LeNet CNN
让我们重新审视具有相同数据集的相同 LeNet 架构,以在 Keras 中构建和训练 CNN 模型:
1. 导入所需的 Keras 模块:
```py
import keras
from keras.models import Sequential
from keras.layers import Conv2D,MaxPooling2D, Dense, Flatten, Reshape
from keras.optimizers import SGD
```
1. 定义每个层的过滤器数量:
```py
n_filters=[32,64]
```
1. 定义其他超参数:
```py
learning_rate = 0.01
n_epochs = 10
batch_size = 100
```
1. 定义顺序模型并添加层以将输入数据重新整形为形状`(n_width,n_height,n_depth)`:
```py
model = Sequential()
model.add(Reshape(target_shape=(n_width,n_height,n_depth),
input_shape=(n_inputs,))
)
```
1. 使用`4 x 4`内核过滤器,`SAME`填充和`relu`激活添加第一个卷积层:
```py
model.add(Conv2D(filters=n_filters[0],kernel_size=4,
padding='SAME',activation='relu')
)
```
1. 添加区域大小为`2 x 2`且步长为`2 x 2`的池化层:
```py
model.add(MaxPooling2D(pool_size=(2,2),strides=(2,2)))
```
1. 以与添加第一层相同的方式添加第二个卷积和池化层:
```py
model.add(Conv2D(filters=n_filters[1],kernel_size=4,
padding='SAME',activation='relu')
)
model.add(MaxPooling2D(pool_size=(2,2),strides=(2,2)))
```
1. 添加层以展平第二个层的输出和 1024 个神经元的完全连接层,以处理展平的输出:
```py
model.add(Flatten())
model.add(Dense(units=1024, activation='relu'))
```
1. 使用`softmax`激活添加最终输出层:
```py
model.add(Dense(units=n_outputs, activation='softmax'))
```
1. 使用以下代码查看模型摘要:
```py
model.summary()
```
该模型描述如下:
```py
Layer (type) Output Shape Param #
=================================================================
reshape_1 (Reshape) (None, 28, 28, 1) 0
_________________________________________________________________
conv2d_1 (Conv2D) (None, 28, 28, 32) 544
_________________________________________________________________
max_pooling2d_1 (MaxPooling2 (None, 14, 14, 32) 0
_________________________________________________________________
conv2d_2 (Conv2D) (None, 14, 14, 64) 32832
_________________________________________________________________
max_pooling2d_2 (MaxPooling2 (None, 7, 7, 64) 0
_________________________________________________________________
flatten_1 (Flatten) (None, 3136) 0
_________________________________________________________________
dense_1 (Dense) (None, 1024) 3212288
_________________________________________________________________
dense_2 (Dense) (None, 10) 10250
=================================================================
Total params: 3,255,914
Trainable params: 3,255,914
Non-trainable params: 0
_________________________________________________________________
```
1. 编译,训练和评估模型:
```py
model.compile(loss='categorical_crossentropy',
optimizer=SGD(lr=learning_rate),
metrics=['accuracy'])
model.fit(X_train, Y_train,batch_size=batch_size,
epochs=n_epochs)
score = model.evaluate(X_test, Y_test)
print('\nTest loss:', score[0])
print('Test accuracy:', score[1])
```
我们得到以下输出:
```py
Epoch 1/10
55000/55000 [===================] - 267s - loss: 0.8854 - acc: 0.7631
Epoch 2/10
55000/55000 [===================] - 272s - loss: 0.2406 - acc: 0.9272
Epoch 3/10
55000/55000 [===================] - 267s - loss: 0.1712 - acc: 0.9488
Epoch 4/10
55000/55000 [===================] - 295s - loss: 0.1339 - acc: 0.9604
Epoch 5/10
55000/55000 [===================] - 278s - loss: 0.1112 - acc: 0.9667
Epoch 6/10
55000/55000 [===================] - 279s - loss: 0.0957 - acc: 0.9714
Epoch 7/10
55000/55000 [===================] - 316s - loss: 0.0842 - acc: 0.9744
Epoch 8/10
55000/55000 [===================] - 317s - loss: 0.0758 - acc: 0.9773
Epoch 9/10
55000/55000 [===================] - 285s - loss: 0.0693 - acc: 0.9790
Epoch 10/10
55000/55000 [===================] - 217s - loss: 0.0630 - acc: 0.9804
Test loss: 0.0628845927377
Test accuracy: 0.9785
```
准确率的差异可归因于我们在这里使用 SGD 优化器这一事实,它没有实现我们用于 TensorFlow 模型的`AdamOptimizer`提供的一些高级功能。
# 用于 CIFAR10 数据的 LeNet
现在我们已经学会了使用 TensorFlow 和 Keras 的 MNIST 数据集构建和训练 CNN 模型,让我们用 CIFAR10 数据集重复练习。
CIFAR-10 数据集包含 60,000 个`32x32`像素形状的 RGB 彩色图像。图像被平均分为 10 个不同的类别或类别:飞机,汽车,鸟,猫,鹿,狗,青蛙,马,船和卡车。 CIFAR-10 和 CIFAR-100 是包含 8000 万个图像的大图像数据集的子集。 CIFAR 数据集由 Alex Krizhevsky,Vinod Nair 和 Geoffrey Hinton 收集和标记。数字 10 和 100 表示图像类别的数量。
有关 CIFAR 数据集的更多详细信息,请访问此链接:
<http://www.cs.toronto.edu/~kriz/cifar.html>
和
<http://www.cs.toronto.edu/~kriz/learning-features-2009-TR.pdf>
我们选择了 CIFAR 10,因为它有 3 个通道,即图像的深度为 3,而 MNIST 数据集只有一个通道。 为了简洁起见,我们将详细信息留给下载并将数据拆分为训练和测试集,并在本书代码包中的`datasetslib`包中提供代码。
您可以按照 Jupyter 笔记本中的代码`ch-09b_CNN_CIFAR10_TF_and_Keras`。
我们使用以下代码加载和预处理 CIFAR10 数据:
```py
from datasetslib.cifar import cifar10
from datasetslib import imutil
dataset = cifar10()
dataset.x_layout=imutil.LAYOUT_NHWC
dataset.load_data()
dataset.scaleX()
```
加载数据使得图像采用`'NHWC'`格式,使数据变形(`number_of_samples, image_height, image_width, image_channels`)。我们将图像通道称为图像深度。图像中的每个像素是 0 到 255 之间的数字。使用 MinMax 缩放来缩放数据集,以通过将所有像素值除以 255 来标准化图像。
加载和预处理的数据在数据集对象变量中可用作`dataset.X_train`,`dataset.Y_train`,`dataset.X_test`和`dataset.Y_test`。
# TensorFlow 中的用于 CIFAR10 的卷积网络
我们保持层,滤波器及其大小与之前的 MNIST 示例中的相同,增加了一个正则化层。由于此数据集与 MNIST 相比较复杂,因此我们为正则化目的添加了额外的丢弃层:
```py
tf.nn.dropout(layer1_pool, keep_prob)
```
在预测和评估期间,占位符`keep_prob`设置为 1。这样我们就可以重复使用相同的模型进行训练以及预测和评估。
有关 CIFAR10 数据的 LeNet 模型的完整代码在笔记本`ch-09b_CNN_CIFAR10_TF_and_Keras`中提供。
在运行模型时,我们得到以下输出:
```py
Epoch: 0000 loss = 2.115784
Epoch: 0001 loss = 1.620117
Epoch: 0002 loss = 1.417657
Epoch: 0003 loss = 1.284346
Epoch: 0004 loss = 1.164068
Epoch: 0005 loss = 1.058837
Epoch: 0006 loss = 0.953583
Epoch: 0007 loss = 0.853759
Epoch: 0008 loss = 0.758431
Epoch: 0009 loss = 0.663844
Epoch: 0010 loss = 0.574547
Epoch: 0011 loss = 0.489902
Epoch: 0012 loss = 0.410211
Epoch: 0013 loss = 0.342640
Epoch: 0014 loss = 0.280877
Epoch: 0015 loss = 0.234057
Epoch: 0016 loss = 0.195667
Epoch: 0017 loss = 0.161439
Epoch: 0018 loss = 0.140618
Epoch: 0019 loss = 0.126363
Model Trained.
Accuracy: 0.6361
```
与我们在 MNIST 数据上获得的准确率相比,我们没有获得良好的准确率。通过调整不同的超参数并改变卷积和池化层的组合,可以实现更好的准确率。我们将其作为挑战,让读者探索并尝试不同的 LeNet 架构和超参数变体,以实现更高的准确率。
# Keras 中的用于 CIFAR10 的卷积网络
让我们在 Keras 重复 LeNet CNN 模型构建和 CIFAR10 数据训练。我们保持架构与前面的示例相同,以便轻松解释概念。在 Keras 中,丢弃层添加如下:
```py
model.add(Dropout(0.2))
```
用于 CIFAR10 CNN 模型的 Keras 中的完整代码在笔记本`ch-09b_CNN_CIFAR10_TF_and_Keras`中提供。
在运行模型时,我们得到以下模型描述:
```py
_________________________________________________________________
Layer (type) Output Shape Param #
=================================================================
conv2d_1 (Conv2D) (None, 32, 32, 32) 1568
_________________________________________________________________
max_pooling2d_1 (MaxPooling2 (None, 16, 16, 32) 0
_________________________________________________________________
dropout_1 (Dropout) (None, 16, 16, 32) 0
_________________________________________________________________
conv2d_2 (Conv2D) (None, 16, 16, 64) 32832
_________________________________________________________________
max_pooling2d_2 (MaxPooling2 (None, 8, 8, 64) 0
_________________________________________________________________
dropout_2 (Dropout) (None, 8, 8, 64) 0
_________________________________________________________________
flatten_1 (Flatten) (None, 4096) 0
_________________________________________________________________
dense_1 (Dense) (None, 1024) 4195328
_________________________________________________________________
dropout_3 (Dropout) (None, 1024) 0
_________________________________________________________________
dense_2 (Dense) (None, 10) 10250
=================================================================
Total params: 4,239,978
Trainable params: 4,239,978
Non-trainable params: 0
_________________________________________________________________
```
我们得到以下训练和评估结果:
```py
Epoch 1/10
50000/50000 [====================] - 191s - loss: 1.5847 - acc: 0.4364
Epoch 2/10
50000/50000 [====================] - 202s - loss: 1.1491 - acc: 0.5973
Epoch 3/10
50000/50000 [====================] - 223s - loss: 0.9838 - acc: 0.6582
Epoch 4/10
50000/50000 [====================] - 223s - loss: 0.8612 - acc: 0.7009
Epoch 5/10
50000/50000 [====================] - 224s - loss: 0.7564 - acc: 0.7394
Epoch 6/10
50000/50000 [====================] - 217s - loss: 0.6690 - acc: 0.7710
Epoch 7/10
50000/50000 [====================] - 222s - loss: 0.5925 - acc: 0.7945
Epoch 8/10
50000/50000 [====================] - 221s - loss: 0.5263 - acc: 0.8191
Epoch 9/10
50000/50000 [====================] - 237s - loss: 0.4692 - acc: 0.8387
Epoch 10/10
50000/50000 [====================] - 230s - loss: 0.4320 - acc: 0.8528
Test loss: 0.849927025414
Test accuracy: 0.7414
```
再次,我们将其作为挑战,让读者探索并尝试不同的 LeNet 架构和超参数变体,以实现更高的准确率。
# 总结
在本章中,我们学习了如何使用 TensorFlow 和 Keras 创建卷积神经网络。我们学习了卷积和池化的核心概念,这是 CNN 的基础。我们学习了 LeNet 系列架构,并为 MNIST 和 CIFAR 数据集创建,训练和评估了 LeNet 族模型。 TensorFlow 和 Keras 提供了许多卷积和池化层和操作。鼓励读者探索本章未涉及的层和操作。
在下一章中,我们将继续学习如何使用自编码器架构将 TensorFlow 应用于图像数据。
- TensorFlow 1.x 深度学习秘籍
- 零、前言
- 一、TensorFlow 简介
- 二、回归
- 三、神经网络:感知器
- 四、卷积神经网络
- 五、高级卷积神经网络
- 六、循环神经网络
- 七、无监督学习
- 八、自编码器
- 九、强化学习
- 十、移动计算
- 十一、生成模型和 CapsNet
- 十二、分布式 TensorFlow 和云深度学习
- 十三、AutoML 和学习如何学习(元学习)
- 十四、TensorFlow 处理单元
- 使用 TensorFlow 构建机器学习项目中文版
- 一、探索和转换数据
- 二、聚类
- 三、线性回归
- 四、逻辑回归
- 五、简单的前馈神经网络
- 六、卷积神经网络
- 七、循环神经网络和 LSTM
- 八、深度神经网络
- 九、大规模运行模型 -- GPU 和服务
- 十、库安装和其他提示
- TensorFlow 深度学习中文第二版
- 一、人工神经网络
- 二、TensorFlow v1.6 的新功能是什么?
- 三、实现前馈神经网络
- 四、CNN 实战
- 五、使用 TensorFlow 实现自编码器
- 六、RNN 和梯度消失或爆炸问题
- 七、TensorFlow GPU 配置
- 八、TFLearn
- 九、使用协同过滤的电影推荐
- 十、OpenAI Gym
- TensorFlow 深度学习实战指南中文版
- 一、入门
- 二、深度神经网络
- 三、卷积神经网络
- 四、循环神经网络介绍
- 五、总结
- 精通 TensorFlow 1.x
- 一、TensorFlow 101
- 二、TensorFlow 的高级库
- 三、Keras 101
- 四、TensorFlow 中的经典机器学习
- 五、TensorFlow 和 Keras 中的神经网络和 MLP
- 六、TensorFlow 和 Keras 中的 RNN
- 七、TensorFlow 和 Keras 中的用于时间序列数据的 RNN
- 八、TensorFlow 和 Keras 中的用于文本数据的 RNN
- 九、TensorFlow 和 Keras 中的 CNN
- 十、TensorFlow 和 Keras 中的自编码器
- 十一、TF 服务:生产中的 TensorFlow 模型
- 十二、迁移学习和预训练模型
- 十三、深度强化学习
- 十四、生成对抗网络
- 十五、TensorFlow 集群的分布式模型
- 十六、移动和嵌入式平台上的 TensorFlow 模型
- 十七、R 中的 TensorFlow 和 Keras
- 十八、调试 TensorFlow 模型
- 十九、张量处理单元
- TensorFlow 机器学习秘籍中文第二版
- 一、TensorFlow 入门
- 二、TensorFlow 的方式
- 三、线性回归
- 四、支持向量机
- 五、最近邻方法
- 六、神经网络
- 七、自然语言处理
- 八、卷积神经网络
- 九、循环神经网络
- 十、将 TensorFlow 投入生产
- 十一、更多 TensorFlow
- 与 TensorFlow 的初次接触
- 前言
- 1. TensorFlow 基础知识
- 2. TensorFlow 中的线性回归
- 3. TensorFlow 中的聚类
- 4. TensorFlow 中的单层神经网络
- 5. TensorFlow 中的多层神经网络
- 6. 并行
- 后记
- TensorFlow 学习指南
- 一、基础
- 二、线性模型
- 三、学习
- 四、分布式
- TensorFlow Rager 教程
- 一、如何使用 TensorFlow Eager 构建简单的神经网络
- 二、在 Eager 模式中使用指标
- 三、如何保存和恢复训练模型
- 四、文本序列到 TFRecords
- 五、如何将原始图片数据转换为 TFRecords
- 六、如何使用 TensorFlow Eager 从 TFRecords 批量读取数据
- 七、使用 TensorFlow Eager 构建用于情感识别的卷积神经网络(CNN)
- 八、用于 TensorFlow Eager 序列分类的动态循坏神经网络
- 九、用于 TensorFlow Eager 时间序列回归的递归神经网络
- TensorFlow 高效编程
- 图嵌入综述:问题,技术与应用
- 一、引言
- 三、图嵌入的问题设定
- 四、图嵌入技术
- 基于边重构的优化问题
- 应用
- 基于深度学习的推荐系统:综述和新视角
- 引言
- 基于深度学习的推荐:最先进的技术
- 基于卷积神经网络的推荐
- 关于卷积神经网络我们理解了什么
- 第1章概论
- 第2章多层网络
- 2.1.4生成对抗网络
- 2.2.1最近ConvNets演变中的关键架构
- 2.2.2走向ConvNet不变性
- 2.3时空卷积网络
- 第3章了解ConvNets构建块
- 3.2整改
- 3.3规范化
- 3.4汇集
- 第四章现状
- 4.2打开问题
- 参考
- 机器学习超级复习笔记
- Python 迁移学习实用指南
- 零、前言
- 一、机器学习基础
- 二、深度学习基础
- 三、了解深度学习架构
- 四、迁移学习基础
- 五、释放迁移学习的力量
- 六、图像识别与分类
- 七、文本文件分类
- 八、音频事件识别与分类
- 九、DeepDream
- 十、自动图像字幕生成器
- 十一、图像着色
- 面向计算机视觉的深度学习
- 零、前言
- 一、入门
- 二、图像分类
- 三、图像检索
- 四、对象检测
- 五、语义分割
- 六、相似性学习
- 七、图像字幕
- 八、生成模型
- 九、视频分类
- 十、部署
- 深度学习快速参考
- 零、前言
- 一、深度学习的基础
- 二、使用深度学习解决回归问题
- 三、使用 TensorBoard 监控网络训练
- 四、使用深度学习解决二分类问题
- 五、使用 Keras 解决多分类问题
- 六、超参数优化
- 七、从头开始训练 CNN
- 八、将预训练的 CNN 用于迁移学习
- 九、从头开始训练 RNN
- 十、使用词嵌入从头开始训练 LSTM
- 十一、训练 Seq2Seq 模型
- 十二、深度强化学习
- 十三、生成对抗网络
- TensorFlow 2.0 快速入门指南
- 零、前言
- 第 1 部分:TensorFlow 2.00 Alpha 简介
- 一、TensorFlow 2 简介
- 二、Keras:TensorFlow 2 的高级 API
- 三、TensorFlow 2 和 ANN 技术
- 第 2 部分:TensorFlow 2.00 Alpha 中的监督和无监督学习
- 四、TensorFlow 2 和监督机器学习
- 五、TensorFlow 2 和无监督学习
- 第 3 部分:TensorFlow 2.00 Alpha 的神经网络应用
- 六、使用 TensorFlow 2 识别图像
- 七、TensorFlow 2 和神经风格迁移
- 八、TensorFlow 2 和循环神经网络
- 九、TensorFlow 估计器和 TensorFlow HUB
- 十、从 tf1.12 转换为 tf2
- TensorFlow 入门
- 零、前言
- 一、TensorFlow 基本概念
- 二、TensorFlow 数学运算
- 三、机器学习入门
- 四、神经网络简介
- 五、深度学习
- 六、TensorFlow GPU 编程和服务
- TensorFlow 卷积神经网络实用指南
- 零、前言
- 一、TensorFlow 的设置和介绍
- 二、深度学习和卷积神经网络
- 三、TensorFlow 中的图像分类
- 四、目标检测与分割
- 五、VGG,Inception,ResNet 和 MobileNets
- 六、自编码器,变分自编码器和生成对抗网络
- 七、迁移学习
- 八、机器学习最佳实践和故障排除
- 九、大规模训练
- 十、参考文献