
# 2.1 Catkin编译系统
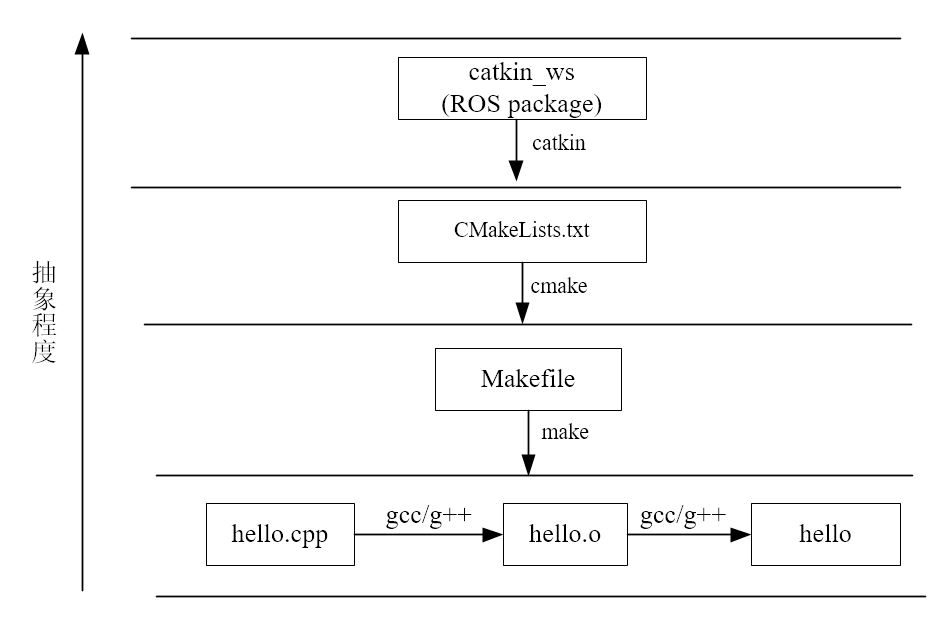
对于源代码包,我们只有编译才能在系统上运行。而Linux下的编译器有gcc、g++,随着源文件的增加,直接用gcc/g++命令的方式显得效率低下,人们开始用Makefile来进行编译。然而随着工程体量的增大,Makefile也不能满足需求,于是便出现了Cmake工具。CMake是对make工具的生成器,是更高层的工具,它简化了编译构建过程,能够管理大型项目,具有良好的扩展性。对于ROS这样大体量的平台来说,就采用的是CMake,并且ROS对CMake进行了扩展,于是便有了Catkin编译系统。
早期的ROS编译系统是rosbuild,但随着ROS的不断发展,rosbuild逐渐暴露出许多缺点,不能很好满足系统需要。在Groovy版本面世后,Catkin作为rosbuild的替代品被正式投入使用。Catkin操作更加简化且工作效率更高,可移植性更好,而且支持交叉编译和更加合理的功能包分配。目前的ROS同时支持着rosbuild和Catkin两种编译系统,但ROS的核心软件包也已经全部转换为Catkin。rosbuild已经被逐步淘汰,所以建议初学者直接上手Catkin。
本节我们主要来介绍catkin的编译系统。
## 2.1.1 Catkin特点
Catkin是基于CMake的编译构建系统,具有以下特点:
* Catkin沿用了包管理的传统像 `find_package()`基础结构,`pkg-config`
* 扩展了CMake,例如
* 软件包编译后无需安装就可使用
* 自动生成`find_package()`代码,`pkg-config`文件
* 解决了多个软件包构建顺序问题
一个Catkin的软件包(package)必须要包括两个文件:
* package.xml: 包括了package的描述信息
* name, description, version, maintainer(s), license
* opt. authors, url's, dependencies, plugins, etc...
* CMakeLists.txt: 构建package所需的CMake文件
* 调用Catkin的函数/宏
* 解析`package.xml`
* 找到其他依赖的catkin软件包
* 将本软件包添加到环境变量
## 2.1.2 Catkin工作原理
catkin编译的工作流程如下:
1. 首先在工作空间`catkin_ws/src/`下递归的查找其中每一个ROS的package。
2. package中会有`package.xml`和`CMakeLists.txt`文件,Catkin(CMake)编译系统依据`CMakeLists.txt`文件,从而生成`makefiles`(放在`catkin_ws/build/`)。
3. 然后`make`刚刚生成的`makefiles`等文件,编译链接生成可执行文件(放在`catkin_ws/devel`)。
也就是说,Catkin就是将`cmake`与`make`指令做了一个封装从而完成整个编译过程的工具。catkin有比较突出的优点,主要是:
* 操作更加简单
* 一次配置,多次使用
* 跨依赖项目编译
## 2.1.3 使用`catkin_make`进行编译
要用catkin编译一个工程或软件包,只需要用`catkin_make`指令。一般当我们写完代码,执行一次`catkin_make`进行编译,调用系统自动完成编译和链接过程,构建生成目标文件。编译的一般性流程如下,在1.5节我们编译ROS-Academy-for-Beginners教学包就是这样的流程。
```bash
$ cd ~/catkin_ws #回到工作空间,catkin_make必须在工作空间下执行
$ catkin_make #开始编译
$ source ~/catkin_ws/devel/setup.bash #刷新坏境
```
**注意:** catkin编译之前需要回到工作空间目录,`catkin_make`在其他路径下编译不会成功。编译完成后,如果有新的目标文件产生(原来没有),那么一般紧跟着要source刷新环境,使得系统能够找到刚才编译生成的ROS可执行文件。这个细节比较容易遗漏,致使后面出现可执行文件无法打开等错误。
`catkin_make`命令也有一些可选参数,例如:
```
catkin_make [args]
-h, --help 帮助信息
-C DIRECTORY, --directory DIRECTORY
工作空间的路径 (默认为 '.')
--source SOURCE src的路径 (默认为'workspace_base/src')
--build BUILD build的路径 (默认为'workspace_base/build')
--use-ninja 用ninja取代make
--use-nmake 用nmake取'make
--force-cmake 强制cmake,即使已经cmake过
--no-color 禁止彩色输出(只对catkin_make和CMake生效)
--pkg PKG [PKG ...] 只对某个PKG进行make
--only-pkg-with-deps ONLY_PKG_WITH_DEPS [ONLY_PKG_WITH_DEPS ...]
将指定的package列入白名单CATKIN_WHITELIST_PACKAGES,
之编译白名单里的package。该环境变量存在于CMakeCache.txt。
--cmake-args [CMAKE_ARGS [CMAKE_ARGS ...]]
传给CMake的参数
--make-args [MAKE_ARGS [MAKE_ARGS ...]]
传给Make的参数
--override-build-tool-check
用来覆盖由于不同编译工具产生的错误
```
- 前言
- 第一章 ROS简介
- 机器人时代的到来
- ROS发展历程
- 什么是ROS
- 安装ROS
- 安装ROS-Academy-for-Beginners教学包
- 二进制与源码包
- 安装RoboWare Studio
- 单元测试一
- 第二章 ROS文件系统
- Catkin编译系统
- Catkin工作空间
- Package软件包
- CMakeLists.txt
- package.xml
- Metapacakge软件元包
- 其他常见文件类型
- 单元测试二
- 第三章 ROS通信架构(一)
- Node & Master
- Launch文件
- Topic
- Msg
- 常见msg类型
- 单元测试三
- 第四章 ROS通信架构(二)
- Service
- Srv
- Parameter server
- Action
- 常见srv类型
- 常见action类型
- 单元测试四
- 第五章 常用工具
- Gazebo
- RViz
- Rqt
- Rosbag
- Rosbridge
- moveit!
- 单元测试五
- 第六章 roscpp
- Client Library与roscpp
- 节点初始、关闭与NodeHandle
- Topic in roscpp
- Service in roscpp
- Param in roscpp
- 时钟
- 日志与异常
- 第七章 rospy
- Rospy与主要接口
- Topic in rospy
- Service in rospy
- Param与Time
- 第八章 TF与URDF
- 认识TF
- TF消息
- tf in c++
- tf in python
- 统一机器人描述格式
- 附录:TF数学基础
- 三维空间刚体运动---旋转矩阵
- 三维空间刚体运动---欧拉角
- 三维空间刚体运动---四元数
- 第九章 SLAM
- 地图
- Gmapping
- Karto
- Hector
- 第十章 Navigation
- Navigation Stack
- move_base
- costmap
- Map_server & Amcl
- 附录:Navigation工具包说明
- amcl
- local_base_planner
- carrot_planner
- clear_costmap_recovery
- costmap_2d
- dwa_local_planner
- fake_localization
- global_planner
- map_server
- move_base_msg
- move_base
- move_slow_and_clear
- navfn
- nav_core
- robot_pose_ekf
- rotate_recovery