
[TOC]
## 概述
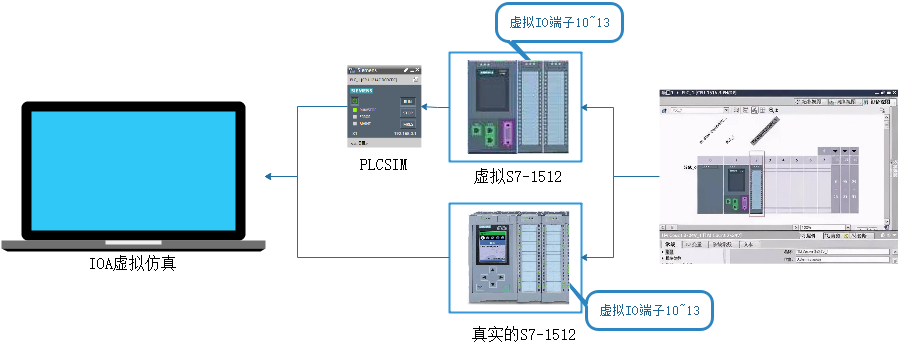
如图所示,IOA支持虚、实两种S7-1512的PLC接入, 通过虚拟S7-1512进行仿真时候需要接入S7-PLCSIM Advanced 软件。
备注:
* 虚拟S7-1512以及真实的S7-1512均采用的是虚拟IO端子接入,即10.0至13.7共计32个IO端口;
* 真实的S7-1512只需要主控CPU接入即可,不需要额外安装IO扩展端子,其虚拟端子10.0至13.7可以直接在IOA之中使用。[视觉相机应用](%E8%A7%86%E8%A7%89%E7%9B%B8%E6%9C%BA%E5%BA%94%E7%94%A8.md)
>教程及下载
>[博图开发环境包及安装步骤][链接](https://pan.baidu.com/s/1julYDSAg-vBR6liluKwK4A)
提取码:pwk3
>[S7-1512虚拟PLC接入视频讲解](//player.bilibili.com/player.html?bvid=BV1o54y1s784&page=1)
***
## S7-1512接入信号说明
IOA软件支持虚拟的S7-1512以及真实的S7-1512接入,需要注意的是,IOA软件之中已经建立了1对1的PLC物理信号以及虚拟寄存器关系,在PLC和IOA建立连接时,PLC需使用模板工程文件。IOA S7-1512控制器与PLC的端口建立的映射关系分别如下表所述:
> S7-1512模板工程文件[下载](http://www.ioaol.com/down#Four)
| PLC的端口/IO |IOA中的信号映射 |备注 |
| --- | --- |--- |
| Q10.0. ~ Q13.7 | Q10. 0~ Q13.7 | |
| I10.0 ~ I13.7 | I10.0 ~ I13.7 | |
| Axis[1](DB寄存器) | M1 |虚拟PLC支持轴工艺仿真 |
| Axis[2](DB寄存器) | M2 |虚拟PLC支持轴工艺仿真 |
| Axis[3](DB寄存器) | M3 |虚拟PLC支持轴工艺仿真 |
| Axis[4](DB寄存器) | M4 |虚拟PLC支持轴工艺仿真 |
| Fin00~Fin03 | float32输入0~3 |映射至寄存器 |
| Fout00~Fout03 | float32输出0~3 |映射至寄存器 |
> 控制器输入点映射说明
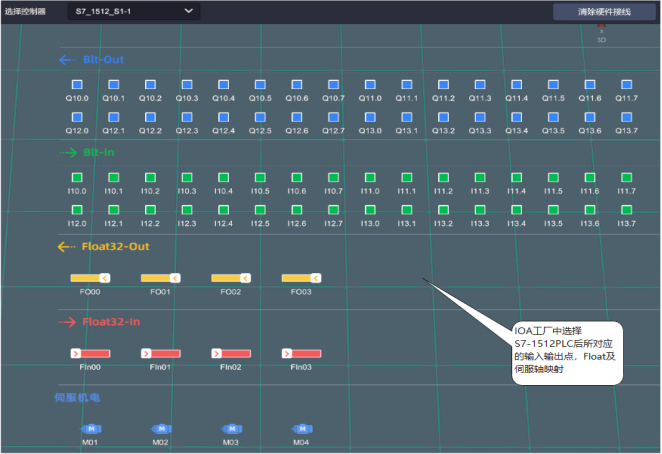
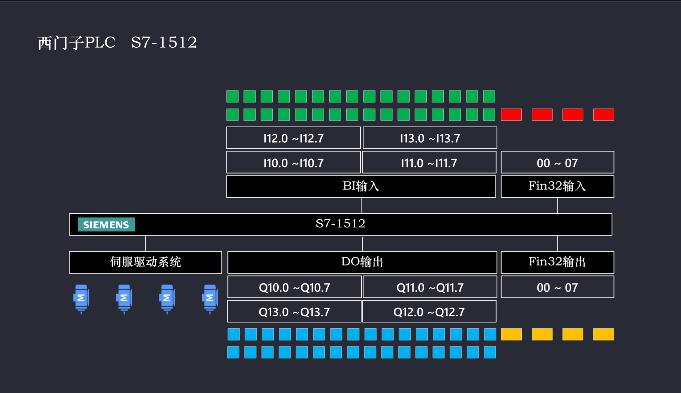
由上图可以看出,IOA中S7-1214控制器包含32个输入端口,32个输出端口,分别为I10.0~I13.7,Q10.0~Q13.7。这些输入输出点和PLC中的I/O地址I10.0~I13.7,Q10.0~Q13.7是一一对应的(对于实体PLC不需要给模块分配这些地址,可在编程时直接使用)。
>控制器与IOA工厂数据交互对应关系
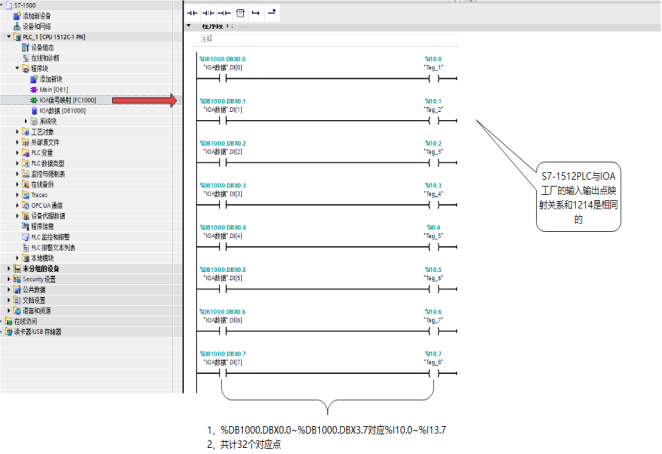
对于Float接口及伺服电机接口对应模板工程中的DB1000中的寄存器,如下图所示
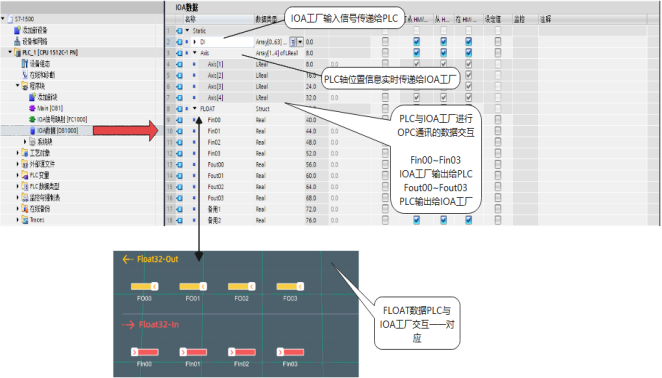
PLC与IOA工厂的信息交互主要体现在这几个方面,我们针对这来编写PLC控制程序,并编译下载后与IOA进行对应连接,那么就可以实现对IOA工厂中搭建场景的完美控制。它对于IOA软件中的所有模型都适用,所以由此可将模型分为四个类型:输入点控制型,输出点控制型,伺服轴控制型,FLOAT控制型。这些类型都可以对虚拟1512PLC和真实1512PLC使用。
***
## 虚拟S7-1512与IOA工厂连接编程控制示例说明
### 基本DO控制示例
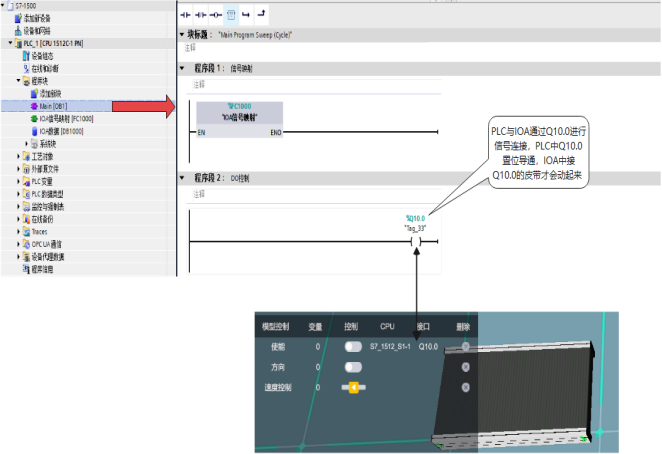
* 在IOA工厂中添加S7-1512控制器,并添加一条皮带线,给皮带线使能配置Q10.0输出点
* 打开模板工程,在程序编辑区添加一个线圈输出,配置Q10.0输出点
* 将程序下载到PLC中。IOA S7-1512控制器连接PLC,并点击IOA运行按钮。
* 观察PLC程序,当Q10.0置位时,线体使能所接Q10.0也接通了,同时线体转动了。
***
### 基本DI控制示例
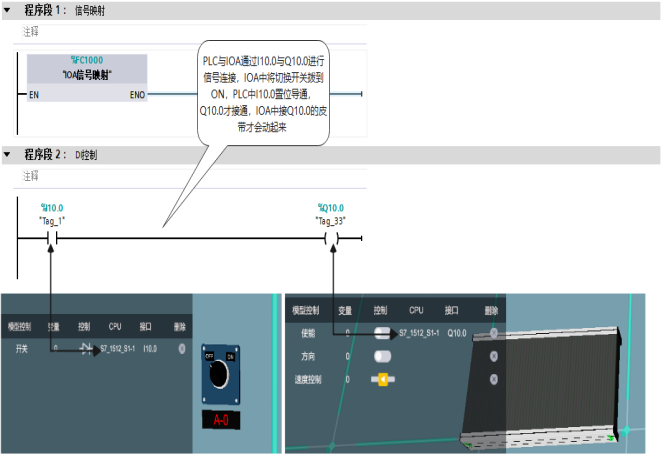
* 在IOA工厂中添加S7-1512控制器,并添加一条皮带线和一个切换开关,给皮带线使能配置Q10.0输出点,切换开关配置I10.0输入点。
* 打开模板工程,在程序编辑区添加一个常开触点,配置I10.0输入点, 一个线圈输出,配置Q10.0输出点。
* 将程序下载到PLC中。IOA S7-1512控制器连接PLC,并点击IOA运行按钮。
* 观察PLC程序,打开切换开关时,I10.0得电,常开触点接通,线体使能所接Q10.0也接通,同时线体转动了。当关闭切换开关,I10.0失电,常开触点断开,线体使能所接Q10.0也断开,线体停止转动。
***
### 基本电机控制示例
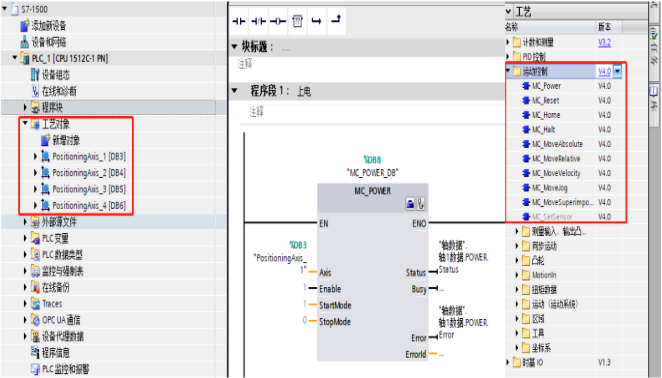
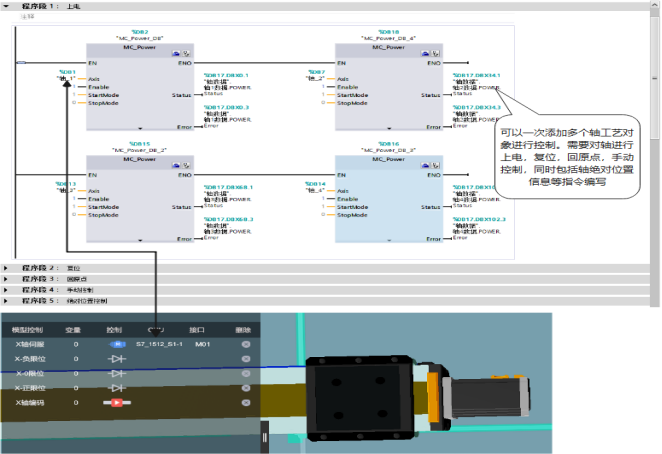
* 在IOA工厂中添加S7-1512控制器,并添加一个单轴机械手,伺服接口配置M1。
* 打开模板工程,在工艺对象中添加一个定位轴工艺对象,并添加轴控制指令。
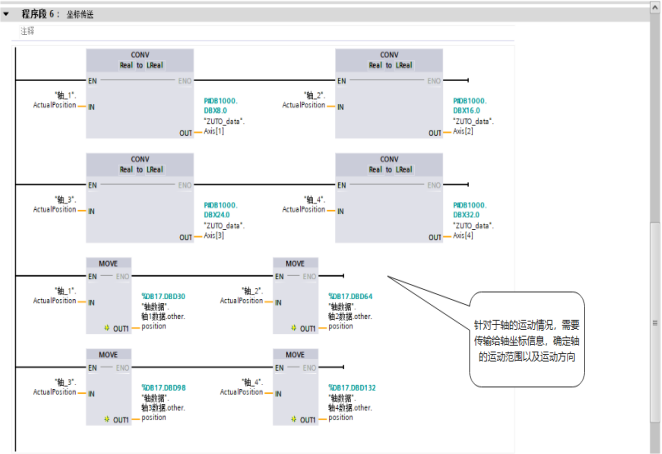
* 添加CONVERT指令,将轴位置传送到DB1000中的Axis[1]寄存器。
* 将程序下载到PLC中。IOA S7-1512控制器连接PLC,并点击IOA运行按钮。
* 监控PLC程序,通过MoveJog指令控制轴前后运动,同时观察IOA中单轴机械手的运行状态。
***
### 基本FLOAT数据控制示例
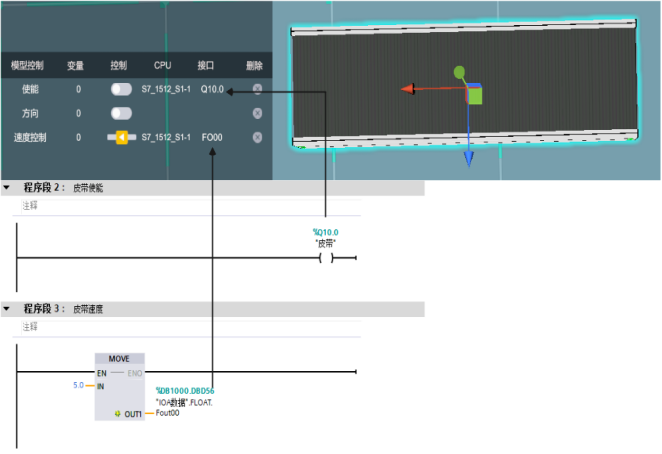
* 在IOA工厂中添加S7-1512控制器,并添加一条皮带线,给皮带线使能配置Q10.0输出点,速度控制配置FO00
* 打开模板工程,在程序编辑区添加一个线圈输出,配置Q10.0输出点。添加Move指令,给FO00赋值控制皮带速度。
* 将程序下载到PLC中。IOA S7-1512控制器连接PLC,并点击IOA运行按钮。
* 观察PLC程序,给FO00赋值不同数值时,皮带速度会相应发生改变。
***
- IOA简介
- 软件安装及注册
- 软件安装要求
- 西门子PLC仿真与安装
- 博图软件及仿真软件安装
- 实体1200PLC接入IOA
- 虚拟1200PLC接入IOA
- 虚拟1500PLC接入IOA
- S7-1214接入IOA信号说明
- S7-1512接入IOA信号说明
- ZMC运动控制系列仿真与安装
- ZMC308BE控制器说明
- ZMC308BE接入IOA仿真
- KEBA工业机器人软件安装使用及仿真
- 软件安装及维护
- IOA仿真与虚拟示教器
- IOA仿真与真实示教器
- 单片机控制与仿真
- arduino-uno控制器
- uno接入说明
- uno函数库
- arduino-mega控制器
- mega接入说明
- mega函数库
- ESP32物联网单片机
- ESP32接入说明
- ESP32库函数
- Python虚拟示教器控制器
- 虚拟机器人示教器
- 基础模块
- Mbus-S虚拟工厂模块
- Mbus-R4模块
- 物联网模块
- Python 环境搭建
- 视觉相机应用
- 图像识别助手说明
- 视觉相机接入IOA方法
- 软件注册
- 软件下载
- 软件安装
- 快速入门
- 快速上手视频合集
- 软件界面及基本操作
- IOA界面应用基础操作
- UI界面说明
- 快捷键应用
- 3D导航模式
- 3D场景布局操作
- 控制器连接
- 11
- IOA模型库概览
- 物流传输模型库说明
- 机械零件模型说明
- 机电单元模型说明
- 传感交互模型说明
- 人机交互模型
- 传感器模型
- 虚拟继电模型
- 机器人模型
- 物料模型库
- 移动机器人
- 建筑模型库
- 5分钟入门课程包
- 西门子PLC实训课程资源包
- 工业机器人示教与编程
- ZMC运动控制与编程
- 嵌入式入门与仿真
- 系统集成与应用