
# 6.4 调度循环
所有的初始化工作都已经完成了,是时候启动运行时调度器了。 我们已经知道,当所有准备工作都完成后, 最后一个开始执行的引导调用就是`runtime.mstart`了。现在我们来研究一下它在干什么。
```
TEXT runtime·rt0_go(SB),NOSPLIT,$0
(...)
CALL runtime·newproc(SB) // G 初始化
POPQ AX
POPQ AX
// 启动 M
CALL runtime·mstart(SB) // 开始执行
RET
DATA runtime·mainPC+0(SB)/8,$runtime·main(SB)
GLOBL runtime·mainPC(SB),RODATA,$8
```
## 6.4.1 执行前的准备
### `mstart`与`mstart1`
在启动前,在[6.2 初始化](https://golang.design/under-the-hood/zh-cn/part2runtime/ch06sched/init)中我们已经了解到 G 的栈边界是还没有初始化的。 因此我们必须在开始前计算栈边界,因此在`mstart1`之前,就是一些确定执行栈边界的工作。 当`mstart1`结束后,会执行`mexit`退出 M。`mstart`也是所有新创建的 M 的起点。
```
//go:nosplit
//go:nowritebarrierrec
func mstart() {
_g_ := getg()
// 终于开始确定执行栈的边界了
// 通过检查 g 执行占的边界来确定是否为系统栈
osStack := _g_.stack.lo == 0
if osStack {
// 根据系统栈初始化执行栈的边界
// cgo 可能会离开 stack.hi
// minit 可能会更新栈的边界
size := _g_.stack.hi
if size == 0 {
size = 8192 * sys.StackGuardMultiplier
}
_g_.stack.hi = uintptr(noescape(unsafe.Pointer(&size)))
_g_.stack.lo = _g_.stack.hi - size + 1024
}
// 初始化栈 guard,进而可以同时调用 Go 或 C 函数。
_g_.stackguard0 = _g_.stack.lo + _StackGuard
_g_.stackguard1 = _g_.stackguard0
// 启动!
mstart1()
// 退出线程
if GOOS == "windows" || GOOS == "solaris" || GOOS == "plan9" || GOOS == "darwin" || GOOS == "aix" {
// 由于 windows, solaris, darwin, aix 和 plan9 总是系统分配的栈,在在 mstart 之前放进 _g_.stack 的
// 因此上面的逻辑还没有设置 osStack。
osStack = true
}
// 退出线程
mexit(osStack)
}
```
再来看`mstart1`。
```
func mstart1() {
_g_ := getg()
(...)
// 为了在 mcall 的栈顶使用调用方来结束当前线程,做记录
// 当进入 schedule 之后,我们再也不会回到 mstart1,所以其他调用可以复用当前帧。
save(getcallerpc(), getcallersp())
(...)
minit()
// 设置信号 handler;在 minit 之后,因为 minit 可以准备处理信号的的线程
if _g_.m == &m0 {
mstartm0()
}
// 执行启动函数
if fn := _g_.m.mstartfn; fn != nil {
fn()
}
// 如果当前 m 并非 m0,则要求绑定 p
if _g_.m != &m0 {
// 绑定 p
acquirep(_g_.m.nextp.ptr())
_g_.m.nextp = 0
}
// 彻底准备好,开始调度,永不返回
schedule()
}
```
几个需要注意的细节:
1. `mstart`除了在程序引导阶段会被运行之外,也可能在每个 m 被创建时运行(本节稍后讨论);
2. `mstart`进入`mstart1`之后,会初始化自身用于信号处理的 g,在`mstartfn`指定时将其执行;
3. 调度循环`schedule`无法返回,因此最后一个`mexit`目前还不会被执行,因此当下所有的 Go 程序创建的线程都无法被释放 (只有一个特例,当使用`runtime.LockOSThread`锁住的 G 退出时会使用`gogo`退出 M,在本节稍后讨论)。
关于运行时信号处理,以及 note 同步机制,我们分别在[6.5 信号处理机制](https://golang.design/under-the-hood/zh-cn/part2runtime/ch06sched/signal)和[6.8 同步原语](https://golang.design/under-the-hood/zh-cn/part2runtime/ch06sched/sync)详细分析。
### M 与 P 的绑定
M 与 P 的绑定过程只是简单的将 P 链表中的 P ,保存到 M 中的 P 指针上。 绑定前,P 的状态一定是`_Pidle`,绑定后 P 的状态一定为`_Prunning`。
```
//go:yeswritebarrierrec
func acquirep(_p_ *p) {
// 此处不允许 write barrier
wirep(_p_)
(...)
}
//go:nowritebarrierrec
//go:nosplit
func wirep(_p_ *p) {
_g_ := getg()
(...)
// 检查 m 是否正常,并检查要获取的 p 的状态
if _p_.m != 0 || _p_.status != _Pidle {
(...)
throw("wirep: invalid p state")
}
// 将 p 绑定到 m,p 和 m 互相引用
_g_.m.p.set(_p_) // *_g_.m.p = _p_
_p_.m.set(_g_.m) // *_p_.m = _g_.m
// 修改 p 的状态
_p_.status = _Prunning
}
```
### M 的暂止和复始
无论出于什么原因,当 M 需要被暂止时,可能(因为还有其他暂止 M 的方法)会执行该调用。 此调用会将 M 进行暂止,并阻塞到它被复始时。这一过程就是工作线程的暂止和复始。
```
// 停止当前 m 的执行,直到新的 work 有效
// 在包含要求的 P 下返回
func stopm() {
_g_ := getg()
(...)
// 将 m 放回到 空闲列表中,因为我们马上就要暂止了
lock(&sched.lock)
mput(_g_.m)
unlock(&sched.lock)
// 暂止当前的 M,在此阻塞,直到被唤醒
notesleep(&_g_.m.park)
// 清除暂止的 note
noteclear(&_g_.m.park)
// 此时已经被复始,说明有任务要执行
// 立即 acquire P
acquirep(_g_.m.nextp.ptr())
_g_.m.nextp = 0
}
```
它的流程也非常简单,将 m 放回至空闲列表中,而后使用 note 注册一个暂止通知, 阻塞到它重新被复始。
## 6.4.2 核心调度
千辛万苦,我们终于来到了核心的调度逻辑。
```
// 调度器的一轮:找到 runnable Goroutine 并进行执行且永不返回
func schedule() {
_g_ := getg()
(...)
// m.lockedg 会在 LockOSThread 下变为非零
if _g_.m.lockedg != 0 {
stoplockedm()
execute(_g_.m.lockedg.ptr(), false) // 永不返回
}
(...)
top:
if sched.gcwaiting != 0 {
// 如果需要 GC,不再进行调度
gcstopm()
goto top
}
if _g_.m.p.ptr().runSafePointFn != 0 {
runSafePointFn()
}
var gp *g
var inheritTime bool
(...)
// 正在 GC,去找 GC 的 g
if gp == nil && gcBlackenEnabled != 0 {
gp = gcController.findRunnableGCWorker(_g_.m.p.ptr())
}
if gp == nil {
// 说明不在 GC
//
// 每调度 61 次,就检查一次全局队列,保证公平性
// 否则两个 Goroutine 可以通过互相 respawn 一直占领本地的 runqueue
if _g_.m.p.ptr().schedtick%61 == 0 && sched.runqsize > 0 {
lock(&sched.lock)
// 从全局队列中偷 g
gp = globrunqget(_g_.m.p.ptr(), 1)
unlock(&sched.lock)
}
}
if gp == nil {
// 说明不在 gc
// 两种情况:
// 1. 普通取
// 2. 全局队列中偷不到的取
// 从本地队列中取
gp, inheritTime = runqget(_g_.m.p.ptr())
(...)
}
if gp == nil {
// 如果偷都偷不到,则休眠,在此阻塞
gp, inheritTime = findrunnable()
}
// 这个时候一定取到 g 了
if _g_.m.spinning {
// 如果 m 是自旋状态,则
// 1. 从自旋到非自旋
// 2. 在没有自旋状态的 m 的情况下,再多创建一个新的自旋状态的 m
resetspinning()
}
if sched.disable.user && !schedEnabled(gp) {
// Scheduling of this goroutine is disabled. Put it on
// the list of pending runnable goroutines for when we
// re-enable user scheduling and look again.
lock(&sched.lock)
if schedEnabled(gp) {
// Something re-enabled scheduling while we
// were acquiring the lock.
unlock(&sched.lock)
} else {
sched.disable.runnable.pushBack(gp)
sched.disable.n++
unlock(&sched.lock)
goto top
}
}
if gp.lockedm != 0 {
// 如果 g 需要 lock 到 m 上,则会将当前的 p
// 给这个要 lock 的 g
// 然后阻塞等待一个新的 p
startlockedm(gp)
goto top
}
// 开始执行
execute(gp, inheritTime)
}
```
先不管上面究竟做了什么,我们直接看最后一句的`execute`。
```
// 在当前 M 上调度 gp。
// 如果 inheritTime 为 true,则 gp 继承剩余的时间片。否则从一个新的时间片开始
// 永不返回。
//
//go:yeswritebarrierrec
func execute(gp *g, inheritTime bool) {
_g_ := getg()
// 将 g 正式切换为 _Grunning 状态
casgstatus(gp, _Grunnable, _Grunning)
gp.waitsince = 0
// 抢占信号
gp.preempt = false
gp.stackguard0 = gp.stack.lo + _StackGuard
if !inheritTime {
_g_.m.p.ptr().schedtick++
}
_g_.m.curg = gp
gp.m = _g_.m
// profiling 相关
hz := sched.profilehz
if _g_.m.profilehz != hz {
setThreadCPUProfiler(hz)
}
(...)
// 终于开始执行了
gogo(&gp.sched)
}
```
当开始执行`execute`后,g 会被切换到`_Grunning`状态。 设置自身的抢占信号,将 m 和 g 进行绑定。 最终调用`gogo`开始执行。
在 amd64 平台下的实现:
```
// void gogo(Gobuf*)
// 从 Gobuf 恢复状态; longjmp
TEXT runtime·gogo(SB), NOSPLIT, $16-8
MOVQ buf+0(FP), BX // 运行现场
MOVQ gobuf_g(BX), DX
MOVQ 0(DX), CX // 确认 g != nil
get_tls(CX)
MOVQ DX, g(CX)
MOVQ gobuf_sp(BX), SP // 恢复 SP
MOVQ gobuf_ret(BX), AX
MOVQ gobuf_ctxt(BX), DX
MOVQ gobuf_bp(BX), BP
MOVQ $0, gobuf_sp(BX) // 清理,辅助 GC
MOVQ $0, gobuf_ret(BX)
MOVQ $0, gobuf_ctxt(BX)
MOVQ $0, gobuf_bp(BX)
MOVQ gobuf_pc(BX), BX // 获取 g 要执行的函数的入口地址
JMP BX // 开始执行
```
这个`gogo`的实现真是非常巧妙。初次阅读时,看到`JMP BX`开始执行 Goroutine 函数体 后就没了,简直一脸疑惑,就这么没了?后续调用怎么回到调度器呢? 事实上我们已经在[6.2 初始化](https://golang.design/under-the-hood/zh-cn/part2runtime/ch06sched/init)一节中看到过相关操作了:
```
func newproc1(fn *funcval, argp *uint8, narg int32, callergp *g, callerpc uintptr) {
siz := narg
siz = (siz + 7) &^ 7
(...)
totalSize := 4*sys.RegSize + uintptr(siz) + sys.MinFrameSize
totalSize += -totalSize & (sys.SpAlign - 1)
sp := newg.stack.hi - totalSize
spArg := sp
(...)
memclrNoHeapPointers(unsafe.Pointer(&newg.sched), unsafe.Sizeof(newg.sched))
newg.sched.sp = sp
newg.stktopsp = sp
newg.sched.pc = funcPC(goexit) + sys.PCQuantum
newg.sched.g = guintptr(unsafe.Pointer(newg))
gostartcallfn(&newg.sched, fn)
(...)
}
```
在执行`gostartcallfn`之前,栈帧状态为:
~~~
+--------+
| | --- --- newg.stack.hi
+--------+ | |
| | | |
+--------+ | |
| | | | siz
+--------+ | |
| | | |
+--------+ | |
| | | ---
+--------+ |
| | |
+--------+ | totalSize = 4*sys.PtrSize + siz
| | |
+--------+ |
| | |
+--------+ |
| | ---
+--------+ 高地址
SP | | 假想的调用方栈帧
+--------+ ---------------------------------------------
| | fn 栈帧
+--------+
| | 低地址
....
+--------+
PC | goexit |
+--------+
~~~
当执行`gostartcallfn`后:
```
func gostartcallfn(gobuf *gobuf, fv *funcval) {
var fn unsafe.Pointer
if fv != nil {
fn = unsafe.Pointer(fv.fn)
} else {
fn = unsafe.Pointer(funcPC(nilfunc))
}
gostartcall(gobuf, fn, unsafe.Pointer(fv))
}
func gostartcall(buf *gobuf, fn, ctxt unsafe.Pointer) {
sp := buf.sp
if sys.RegSize > sys.PtrSize {
sp -= sys.PtrSize
*(*uintptr)(unsafe.Pointer(sp)) = 0
}
sp -= sys.PtrSize
*(*uintptr)(unsafe.Pointer(sp)) = buf.pc
buf.sp = sp
buf.pc = uintptr(fn)
buf.ctxt = ctxt
}
```
此时保存的堆栈的情况如下:
~~~
+--------+
| | --- --- newg.stack.hi
+--------+ | |
| | | |
+--------+ | |
| | | | siz
+--------+ | |
| | | |
+--------+ | |
| | | ---
+--------+ |
| | |
+--------+ | totalSize = 4*sys.PtrSize + siz
| | |
+--------+ |
| | |
+--------+ |
| | ---
+--------+ 高地址
| goexit | 假想的调用方栈帧
+--------+ ---------------------------------------------
SP | | fn 栈帧
+--------+
| | 低地址
....
+--------+
PC | fn |
+--------+
~~~
可以看到,在执行现场`sched.sp`保存的其实是`goexit`的地址。 那么也就是`JMP`跳转到 PC 寄存器处,开始执行`fn`。当`fn`执行完毕后,会将(假想的) 调用方`goexit`的地址恢复到 PC,从而达到执行`goexit`的目的:
```
// 在 Goroutine 返回 goexit + PCQuantum 时运行的最顶层函数。
TEXT runtime·goexit(SB),NOSPLIT,$0-0
BYTE $0x90 // NOP
CALL runtime·goexit1(SB) // 不会返回
// traceback from goexit1 must hit code range of goexit
BYTE $0x90 // NOP
```
那么接下来就是去执行`goexit1`了:
```
// 完成当前 Goroutine 的执行
func goexit1() {
(...)
// 开始收尾工作
mcall(goexit0)
}
```
通过`mcall`完成`goexit0`的调用:
```
// func mcall(fn func(*g))
// 切换到 m->g0 栈, 并调用 fn(g).
// Fn 必须永不返回. 它应该使用 gogo(&g->sched) 来持续运行 g
TEXT runtime·mcall(SB), NOSPLIT, $0-4
MOVL fn+0(FP), DI
get_tls(DX)
MOVL g(DX), AX // 在 g->sched 中保存状态
MOVL 0(SP), BX // 调用方 PC
MOVL BX, (g_sched+gobuf_pc)(AX)
LEAL fn+0(FP), BX // 调用方 SP
MOVL BX, (g_sched+gobuf_sp)(AX)
MOVL AX, (g_sched+gobuf_g)(AX)
// 切换到 m->g0 及其栈,调用 fn
MOVL g(DX), BX
MOVL g_m(BX), BX
MOVL m_g0(BX), SI
CMPL SI, AX // 如果 g == m->g0 要调用 badmcall
JNE 3(PC)
MOVL $runtime·badmcall(SB), AX
JMP AX
MOVL SI, g(DX) // g = m->g0
MOVL (g_sched+gobuf_sp)(SI), SP // sp = m->g0->sched.sp
PUSHL AX
MOVL DI, DX
MOVL 0(DI), DI
CALL DI // 好了,开始调用 fn
POPL AX
MOVL $runtime·badmcall2(SB), AX
JMP AX
RET
```
于是最终开始`goexit0`:
```
// goexit 继续在 g0 上执行
func goexit0(gp *g) {
_g_ := getg()
// 切换当前的 g 为 _Gdead
casgstatus(gp, _Grunning, _Gdead)
if isSystemGoroutine(gp, false) {
atomic.Xadd(&sched.ngsys, -1)
}
// 清理
gp.m = nil
locked := gp.lockedm != 0
gp.lockedm = 0
_g_.m.lockedg = 0
gp.paniconfault = false
gp._defer = nil // 应该已经为 true,但以防万一
gp._panic = nil // Goexit 中 panic 则不为 nil, 指向栈分配的数据
gp.writebuf = nil
gp.waitreason = 0
gp.param = nil
gp.labels = nil
gp.timer = nil
if gcBlackenEnabled != 0 && gp.gcAssistBytes > 0 {
// 刷新 assist credit 到全局池。
// 如果应用在快速创建 Goroutine,这可以为 pacing 提供更好的信息。
scanCredit := int64(gcController.assistWorkPerByte * float64(gp.gcAssistBytes))
atomic.Xaddint64(&gcController.bgScanCredit, scanCredit)
gp.gcAssistBytes = 0
}
// 注意 gp 的栈 scan 目前开始变为 valid,因为它没有栈了
gp.gcscanvalid = true
// 解绑 m 和 g
dropg()
if GOARCH == "wasm" { // wasm 目前还没有线程支持
// 将 g 扔进 gfree 链表中等待复用
gfput(_g_.m.p.ptr(), gp)
// 再次进行调度
schedule() // 永不返回
}
(...)
// 将 g 扔进 gfree 链表中等待复用
gfput(_g_.m.p.ptr(), gp)
if locked {
// 该 Goroutine 可能在当前线程上锁住,因为它可能导致了不正常的内核状态
// 这时候 kill 该线程,而非将 m 放回到线程池。
// 此举会返回到 mstart,从而释放当前的 P 并退出该线程
if GOOS != "plan9" { // See golang.org/issue/22227.
gogo(&_g_.m.g0.sched)
} else {
// 因为我们可能已重用此线程结束,在 plan9 上清除 lockedExt
_g_.m.lockedExt = 0
}
}
// 再次进行调度
schedule()
}
```
退出的善后工作也相对简单,无非就是复位 g 的状态、解绑 m 和 g,将其 放入 gfree 链表中等待其他的 go 语句创建新的 g。
如果 Goroutine 将自身锁在同一个 OS 线程中且没有自行解绑则 m 会退出,而不会被放回到线程池中。 相反,会再次调用 gogo 切换到 g0 执行现场中,这也是目前唯一的退出 m 的机会,在本节最后解释。
### 偷取工作
全局 g 链式队列中取 max 个 g ,其中第一个用于执行,max-1 个放入本地队列。 如果放不下,则只在本地队列中放下能放的。过程比较简单:
```
// 从全局队列中偷取,调用时必须锁住调度器
func globrunqget(_p_ *p, max int32) *g {
// 如果全局队列中没有 g 直接返回
if sched.runqsize == 0 {
return nil
}
// per-P 的部分,如果只有一个 P 的全部取
n := sched.runqsize/gomaxprocs + 1
if n > sched.runqsize {
n = sched.runqsize
}
// 不能超过取的最大个数
if max > 0 && n > max {
n = max
}
// 计算能不能在本地队列中放下 n 个
if n > int32(len(_p_.runq))/2 {
n = int32(len(_p_.runq)) / 2
}
// 修改本地队列的剩余空间
sched.runqsize -= n
// 拿到全局队列队头 g
gp := sched.runq.pop()
// 计数
n--
// 继续取剩下的 n-1 个全局队列放入本地队列
for ; n > 0; n-- {
gp1 := sched.runq.pop()
runqput(_p_, gp1, false)
}
return gp
}
```
从本地队列中取,首先看 next 是否有已经安排要运行的 g ,如果有,则返回下一个要运行的 g 否则,以 cas 的方式从本地队列中取一个 g。
如果是已经安排要运行的 g,则继承剩余的可运行时间片进行运行; 否则以一个新的时间片来运行。
```
// 从本地可运行队列中获取 g
// 如果 inheritTime 为 true,则 g 继承剩余的时间片
// 否则开始一个新的时间片。在所有者 P 上执行
func runqget(_p_ *p) (gp *g, inheritTime bool) {
// 如果有 runnext,则为下一个要运行的 g
for {
// 下一个 g
next := _p_.runnext
// 没有,break
if next == 0 {
break
}
// 如果 cas 成功,则 g 继承剩余时间片执行
if _p_.runnext.cas(next, 0) {
return next.ptr(), true
}
}
// 没有 next
for {
// 本地队列是空,返回 nil
h := atomic.LoadAcq(&_p_.runqhead) // load-acquire, 与其他消费者同步
t := _p_.runqtail
if t == h {
return nil, false
}
// 从本地队列中以 cas 方式拿一个
gp := _p_.runq[h%uint32(len(_p_.runq))].ptr()
if atomic.CasRel(&_p_.runqhead, h, h+1) { // cas-release, 提交消费
return gp, false
}
}
}
```
偷取(steal)的实现是一个非常复杂的过程。这个过程来源于我们 需要仔细的思考什么时候对调度器进行加锁、什么时候对 m 进行暂止、 什么时候将 m 从自旋向非自旋切换等等。
```
// 寻找一个可运行的 Goroutine 来执行。
// 尝试从其他的 P 偷取、从全局队列中获取、poll 网络
func findrunnable() (gp *g, inheritTime bool) {
_g_ := getg()
// 这里的条件与 handoffp 中的条件必须一致:
// 如果 findrunnable 将返回 G 运行,handoffp 必须启动 M.
top:
_p_ := _g_.m.p.ptr()
// 如果在 gc,则暂止当前 m,直到复始后回到 top
if sched.gcwaiting != 0 {
gcstopm()
goto top
}
if _p_.runSafePointFn != 0 {
runSafePointFn()
}
if fingwait && fingwake {
if gp := wakefing(); gp != nil {
ready(gp, 0, true)
}
}
// cgo 调用被终止,继续进入
if *cgo_yield != nil {
asmcgocall(*cgo_yield, nil)
}
// 取本地队列 local runq,如果已经拿到,立刻返回
if gp, inheritTime := runqget(_p_); gp != nil {
return gp, inheritTime
}
// 全局队列 global runq,如果已经拿到,立刻返回
if sched.runqsize != 0 {
lock(&sched.lock)
gp := globrunqget(_p_, 0)
unlock(&sched.lock)
if gp != nil {
return gp, false
}
}
// Poll 网络,优先级比从其他 P 中偷要高。
// 在我们尝试去其他 P 偷之前,这个 netpoll 只是一个优化。
// 如果没有 waiter 或 netpoll 中的线程已被阻塞,则可以安全地跳过它。
// 如果有任何类型的逻辑竞争与被阻塞的线程(例如它已经从 netpoll 返回,但尚未设置 lastpoll)
// 该线程无论如何都将阻塞 netpoll。
if netpollinited() && atomic.Load(&netpollWaiters) > 0 && atomic.Load64(&sched.lastpoll) != 0 {
if list := netpoll(false); !list.empty() { // 无阻塞
gp := list.pop()
injectglist(gp.schedlink.ptr())
casgstatus(gp, _Gwaiting, _Grunnable)
(...)
return gp, false
}
}
// 从其他 P 中偷 work
procs := uint32(gomaxprocs) // 获得 p 的数量
if atomic.Load(&sched.npidle) == procs-1 {
// GOMAXPROCS = 1 或除了我们之外的所有人都已经 idle 了。
// 新的 work 可能出现在 syscall/cgocall/网络/timer返回时
// 它们均没有提交到本地运行队列,因此偷取没有任何意义。
goto stop
}
// 如果自旋状态下 m 的数量 >= busy 状态下 p 的数量,直接进入阻塞
// 该步骤是有必要的,它用于当 GOMAXPROCS>>1 时但程序的并行机制很慢时
// 昂贵的 CPU 消耗。
if !_g_.m.spinning && 2*atomic.Load(&sched.nmspinning) >= procs-atomic.Load(&sched.npidle) {
goto stop
}
// 如果 m 是非自旋状态,切换为自旋
if !_g_.m.spinning {
_g_.m.spinning = true
atomic.Xadd(&sched.nmspinning, 1)
}
for i := 0; i < 4; i++ {
// 随机偷
for enum := stealOrder.start(fastrand()); !enum.done(); enum.next() {
// 已经进入了 GC? 回到顶部,暂止当前的 m
if sched.gcwaiting != 0 {
goto top
}
stealRunNextG := i > 2 // 如果偷了两轮都偷不到,便优先查找 ready 队列
if gp := runqsteal(_p_, allp[enum.position()], stealRunNextG); gp != nil {
// 总算偷到了,立即返回
return gp, false
}
}
}
stop:
// 没有任何 work 可做。
// 如果我们在 GC mark 阶段,则可以安全的扫描并 blacken 对象
// 然后便有 work 可做,运行 idle-time 标记而非直接放弃当前的 P。
if gcBlackenEnabled != 0 && _p_.gcBgMarkWorker != 0 && gcMarkWorkAvailable(_p_) {
_p_.gcMarkWorkerMode = gcMarkWorkerIdleMode
gp := _p_.gcBgMarkWorker.ptr()
casgstatus(gp, _Gwaiting, _Grunnable)
(...)
return gp, false
}
// 仅限于 wasm
// 如果一个回调返回后没有其他 Goroutine 是苏醒的
// 则暂停执行直到回调被触发。
if beforeIdle() {
// 至少一个 Goroutine 被唤醒
goto top
}
// 放弃当前的 P 之前,对 allp 做一个快照
// 一旦我们不再阻塞在 safe-point 时候,可以立刻在下面进行修改
allpSnapshot := allp
// 准备归还 p,对调度器加锁
lock(&sched.lock)
// 进入了 gc,回到顶部暂止 m
if sched.gcwaiting != 0 || _p_.runSafePointFn != 0 {
unlock(&sched.lock)
goto top
}
// 全局队列中又发现了任务
if sched.runqsize != 0 {
gp := globrunqget(_p_, 0)
unlock(&sched.lock)
// 赶紧偷掉返回
return gp, false
}
// 归还当前的 p
if releasep() != _p_ {
throw("findrunnable: wrong p")
}
// 将 p 放入 idle 链表
pidleput(_p_)
// 完成归还,解锁
unlock(&sched.lock)
// 这里要非常小心:
// 线程从自旋到非自旋状态的转换,可能与新 Goroutine 的提交同时发生。
// 我们必须首先丢弃 nmspinning,然后再次检查所有的 per-P 队列(并在期间伴随 #StoreLoad 内存屏障)
// 如果反过来,其他线程可以在我们检查了所有的队列、然后提交一个 Goroutine、再丢弃了 nmspinning
// 进而导致无法复始一个线程来运行那个 Goroutine 了。
// 如果我们发现下面的新 work,我们需要恢复 m.spinning 作为重置的信号,
// 以取消暂止新的工作线程(因为可能有多个 starving 的 Goroutine)。
// 但是,如果在发现新 work 后我们也观察到没有空闲 P,可以暂停当前线程
// 因为系统已满载,因此不需要自旋线程。
wasSpinning := _g_.m.spinning
if _g_.m.spinning {
_g_.m.spinning = false
if int32(atomic.Xadd(&sched.nmspinning, -1)) < 0 {
throw("findrunnable: negative nmspinning")
}
}
// 再次检查所有的 runqueue
for _, _p_ := range allpSnapshot {
// 如果这时本地队列不空
if !runqempty(_p_) {
// 重新获取 p
lock(&sched.lock)
_p_ = pidleget()
unlock(&sched.lock)
// 如果能获取到 p
if _p_ != nil {
// 绑定 p
acquirep(_p_)
// 如果此前已经被切换为自旋
if wasSpinning {
// 重新切换回非自旋
_g_.m.spinning = true
atomic.Xadd(&sched.nmspinning, 1)
}
// 这时候是有 work 的,回到顶部重新 find g
goto top
}
// 看来没有 idle 的 p,不需要重新 find g 了
break
}
}
// 再次检查 idle-priority GC work
// 和上面重新找 runqueue 的逻辑类似
if gcBlackenEnabled != 0 && gcMarkWorkAvailable(nil) {
lock(&sched.lock)
_p_ = pidleget()
if _p_ != nil && _p_.gcBgMarkWorker == 0 {
pidleput(_p_)
_p_ = nil
}
unlock(&sched.lock)
if _p_ != nil {
acquirep(_p_)
if wasSpinning {
_g_.m.spinning = true
atomic.Xadd(&sched.nmspinning, 1)
}
// Go back to idle GC check.
goto stop
}
}
// poll 网络
// 和上面重新找 runqueue 的逻辑类似
if netpollinited() && atomic.Load(&netpollWaiters) > 0 && atomic.Xchg64(&sched.lastpoll, 0) != 0 {
(...)
gp := netpoll(true) // 阻塞到新的 work 有效为止
atomic.Store64(&sched.lastpoll, uint64(nanotime()))
if gp != nil {
lock(&sched.lock)
_p_ = pidleget()
unlock(&sched.lock)
if _p_ != nil {
acquirep(_p_)
injectglist(gp.schedlink.ptr())
casgstatus(gp, _Gwaiting, _Grunnable)
(...)
return gp, false
}
injectglist(gp)
}
}
// 真的什么都没找到
// 暂止当前的 m
stopm()
goto top
}
```
在`findrunnable`这个过程中,我们:
* 首先检查是是否正在进行 GC,如果是则暂止当前的 m 并阻塞休眠;
* 尝试从本地队列中取 g,如果取到,则直接返回,否则继续从全局队列中找 g,如果找到则直接返回;
* 检查是否存在 poll 网络的 g,如果有,则直接返回;
* 如果此时仍然无法找到 g,则从其他 P 的本地队列中偷取;
* 从其他 P 本地队列偷取的工作会执行四轮,在前两轮中只会查找 runnable 队列,后两轮则会优先查找 ready 队列,如果找到,则直接返回;
* 所有的可能性都尝试过了,在准备暂止 m 之前,还要进行额外的检查;
* 首先检查此时是否是 GC mark 阶段,如果是,则直接返回 mark 阶段的 g;
* 如果仍然没有,则对当前的 p 进行快照,准备对调度器进行加锁;
* 当调度器被锁住后,我们仍然还需再次检查这段时间里是否有进入 GC,如果已经进入了 GC,则回到第一步,阻塞 m 并休眠;
* 当调度器被锁住后,如果我们又在全局队列中发现了 g,则直接返回;
* 当调度器被锁住后,我们彻底找不到任务了,则归还释放当前的 P,将其放入 idle 链表中,并解锁调度器;
* 当 M/P 已经解绑后,我们需要将 m 的状态切换出自旋状态,并减少 nmspinning;
* 此时我们仍然需要重新检查所有的队列;
* 如果此时我们发现有一个 P 队列不空,则立刻尝试获取一个 P,如果获取到,则回到第一步,重新执行偷取工作,如果取不到,则说明系统已经满载,无需继续进行调度;
* 同样,我们还需要再检查是否有 GC mark 的 g 出现,如果有,获取 P 并回到第一步,重新执行偷取工作;
* 同样,我们还需要再检查是否存在 poll 网络的 g,如果有,则直接返回;
* 终于,我们什么也没找到,暂止当前的 m 并阻塞休眠。
### M 的唤醒
我们已经看到了 M 的暂止和复始的过程,那么 M 的自旋到非自旋的过程如何发生?
```
func resetspinning() {
_g_ := getg()
(...)
_g_.m.spinning = false
nmspinning := atomic.Xadd(&sched.nmspinning, -1)
(...)
// M wakeup policy is deliberately somewhat conservative, so check if we
// need to wakeup another P here. See "Worker thread parking/unparking"
// comment at the top of the file for details.
if nmspinning == 0 && atomic.Load(&sched.npidle) > 0 {
wakep()
}
}
// 尝试将一个或多个 P 唤醒来执行 G
// 当 G 可能运行时(newproc, ready)时调用该函数
func wakep() {
// 对自旋线程保守一些,必要时只增加一个
// 如果失败,则立即返回
if !atomic.Cas(&sched.nmspinning, 0, 1) {
return
}
startm(nil, true)
}
// Schedules some M to run the p (creates an M if necessary).
// If p==nil, tries to get an idle P, if no idle P's does nothing.
// May run with m.p==nil, so write barriers are not allowed.
// If spinning is set, the caller has incremented nmspinning and startm will
// either decrement nmspinning or set m.spinning in the newly started M.
//go:nowritebarrierrec
func startm(_p_ *p, spinning bool) {
lock(&sched.lock)
if _p_ == nil {
_p_ = pidleget()
if _p_ == nil {
unlock(&sched.lock)
if spinning {
// The caller incremented nmspinning, but there are no idle Ps,
// so it's okay to just undo the increment and give up.
if int32(atomic.Xadd(&sched.nmspinning, -1)) < 0 {
throw("startm: negative nmspinning")
}
}
return
}
}
mp := mget()
unlock(&sched.lock)
if mp == nil {
var fn func()
if spinning {
// The caller incremented nmspinning, so set m.spinning in the new M.
fn = mspinning
}
newm(fn, _p_)
return
}
(...)
if spinning && !runqempty(_p_) {
throw("startm: p has runnable gs")
}
// The caller incremented nmspinning, so set m.spinning in the new M.
mp.spinning = spinning
mp.nextp.set(_p_)
notewakeup(&mp.park)
}
// 尝试从 midel 列表中获取一个 M
// 调度器必须锁住
// 可能在 STW 期间运行,故不允许 write barrier
//go:nowritebarrierrec
func mget() *m {
mp := sched.midle.ptr()
if mp != nil {
sched.midle = mp.schedlink
sched.nmidle--
}
return mp
}
```
### M 的创生
M 是通过`newm`来创生的,一般情况下,能够非常简单的创建, 某些特殊情况(线程状态被污染),M 的创建需要一个叫做模板线程的功能加以配合, 我们在[6.4 线程管理](https://golang.design/under-the-hood/zh-cn/part2runtime/ch06sched/thread)中详细讨论:
```
// 创建一个新的 m. 它会启动并调用 fn 或调度器
// fn 必须是静态、非堆上分配的闭包
// 它可能在 m.p==nil 时运行,因此不允许 write barrier
//go:nowritebarrierrec
func newm(fn func(), _p_ *p) {
// 分配一个 m
mp := allocm(_p_, fn)
// 设置 p 用于后续绑定
mp.nextp.set(_p_)
// 设置 signal mask
mp.sigmask = initSigmask
if gp := getg(); gp != nil && gp.m != nil && (gp.m.lockedExt != 0 || gp.m.incgo) && GOOS != "plan9" {
// 我们处于一个锁定的 M 或可能由 C 启动的线程。这个线程的内核状态可能
// 很奇怪(用户可能已将其锁定)。我们不想将其克隆到另一个线程。
// 相反,请求一个已知状态良好的线程来创建给我们的线程。
//
// 在 plan9 上禁用,见 golang.org/issue/22227
lock(&newmHandoff.lock)
if newmHandoff.haveTemplateThread == 0 {
throw("on a locked thread with no template thread")
}
mp.schedlink = newmHandoff.newm
newmHandoff.newm.set(mp)
if newmHandoff.waiting {
newmHandoff.waiting = false
// 唤醒 m, 自旋到非自旋
notewakeup(&newmHandoff.wake)
}
unlock(&newmHandoff.lock)
return
}
newm1(mp)
}
```
```
// Allocate a new m unassociated with any thread.
// Can use p for allocation context if needed.
// fn is recorded as the new m's m.mstartfn.
//
// This function is allowed to have write barriers even if the caller
// isn't because it borrows _p_.
//
//go:yeswritebarrierrec
func allocm(_p_ *p, fn func()) *m {
_g_ := getg()
_g_.m.locks++ // disable GC because it can be called from sysmon
if _g_.m.p == 0 {
acquirep(_p_) // temporarily borrow p for mallocs in this function
}
// Release the free M list. We need to do this somewhere and
// this may free up a stack we can use.
if sched.freem != nil {
lock(&sched.lock)
var newList *m
for freem := sched.freem; freem != nil; {
if freem.freeWait != 0 {
next := freem.freelink
freem.freelink = newList
newList = freem
freem = next
continue
}
stackfree(freem.g0.stack)
freem = freem.freelink
}
sched.freem = newList
unlock(&sched.lock)
}
mp := new(m)
mp.mstartfn = fn
mcommoninit(mp)
// In case of cgo or Solaris or Darwin, pthread_create will make us a stack.
// Windows and Plan 9 will layout sched stack on OS stack.
if iscgo || GOOS == "solaris" || GOOS == "windows" || GOOS == "plan9" || GOOS == "darwin" {
mp.g0 = malg(-1)
} else {
mp.g0 = malg(8192 * sys.StackGuardMultiplier)
}
mp.g0.m = mp
if _p_ == _g_.m.p.ptr() {
releasep()
}
_g_.m.locks--
if _g_.m.locks == 0 && _g_.preempt { // restore the preemption request in case we've cleared it in newstack
_g_.stackguard0 = stackPreempt
}
return mp
}
```
```
func newm1(mp *m) {
if iscgo {
var ts cgothreadstart
if _cgo_thread_start == nil {
throw("_cgo_thread_start missing")
}
ts.g.set(mp.g0)
ts.tls = (*uint64)(unsafe.Pointer(&mp.tls[0]))
ts.fn = unsafe.Pointer(funcPC(mstart))
if msanenabled {
msanwrite(unsafe.Pointer(&ts), unsafe.Sizeof(ts))
}
execLock.rlock() // Prevent process clone.
asmcgocall(_cgo_thread_start, unsafe.Pointer(&ts))
execLock.runlock()
return
}
execLock.rlock() // Prevent process clone.
newosproc(mp)
execLock.runlock()
}
```
当 m 被创建时,会转去运行`mstart`:
* 如果当前程序为 cgo 程序,则会通过`asmcgocall`来创建线程并调用`mstart`(在[10.4 cgo](https://golang.design/under-the-hood/zh-cn/part2runtime/ch10abi/cgo)中讨论)
* 否则会调用`newosproc`来创建线程,从而调用`mstart`。
既然是`newosproc`,我们此刻仍在 Go 的空间中,那么实现就是操作系统特定的了,
##### 系统线程的创建 (darwin)
```
// 可能在 m.p==nil 情况下运行,因此不允许 write barrier
//go:nowritebarrierrec
func newosproc(mp *m) {
stk := unsafe.Pointer(mp.g0.stack.hi)
(...)
// 初始化 attribute 对象
var attr pthreadattr
var err int32
err = pthread_attr_init(&attr)
if err != 0 {
write(2, unsafe.Pointer(&failthreadcreate[0]), int32(len(failthreadcreate)))
exit(1)
}
// 设置想要使用的栈大小。目前为 64KB
const stackSize = 1 << 16
if pthread_attr_setstacksize(&attr, stackSize) != 0 {
write(2, unsafe.Pointer(&failthreadcreate[0]), int32(len(failthreadcreate)))
exit(1)
}
// 通知 pthread 库不会 join 这个线程。
if pthread_attr_setdetachstate(&attr, _PTHREAD_CREATE_DETACHED) != 0 {
write(2, unsafe.Pointer(&failthreadcreate[0]), int32(len(failthreadcreate)))
exit(1)
}
// 最后创建线程,在 mstart_stub 开始,进行底层设置并调用 mstart
var oset sigset
sigprocmask(_SIG_SETMASK, &sigset_all, &oset)
err = pthread_create(&attr, funcPC(mstart_stub), unsafe.Pointer(mp))
sigprocmask(_SIG_SETMASK, &oset, nil)
if err != 0 {
write(2, unsafe.Pointer(&failthreadcreate[0]), int32(len(failthreadcreate)))
exit(1)
}
}
```
`pthread_create`在[10.1 参与运行时的系统调用](https://golang.design/under-the-hood/zh-cn/part2runtime/ch10abi/syscallrt)中讨论。
##### 系统线程的创建 (linux)
而 linux 上的情况就乐观的多了:
```
// May run with m.p==nil, so write barriers are not allowed.
//go:nowritebarrier
func newosproc(mp *m) {
stk := unsafe.Pointer(mp.g0.stack.hi)
(...)
// 在 clone 期间禁用信号,以便新线程启动时信号被禁止。
// 他们会在 minit 中重新启用。
var oset sigset
sigprocmask(_SIG_SETMASK, &sigset_all, &oset)
ret := clone(cloneFlags, stk, unsafe.Pointer(mp), unsafe.Pointer(mp.g0), unsafe.Pointer(funcPC(mstart)))
sigprocmask(_SIG_SETMASK, &oset, nil)
(...)
}
```
`clone`是系统调用,我们在[10.1 参与运行时的系统调用](https://golang.design/under-the-hood/zh-cn/part2runtime/ch10abi/syscallrt)中讨论 这些系统调用在 Go 中的实现方式。
### M/G 解绑
`dropg`听起来很玄乎,但实际上就是指将当前 g 的 m 置空、将当前 m 的 g 置空,从而完成解绑:
```
// dropg 移除 m 与当前 Goroutine m->curg(简称 gp )之间的关联。
// 通常,调用方将 gp 的状态设置为非 _Grunning 后立即调用 dropg 完成工作。
// 调用方也有责任在 gp 将使用 ready 时重新启动时进行相关安排。
// 在调用 dropg 并安排 gp ready 好后,调用者可以做其他工作,但最终应该
// 调用 schedule 来重新启动此 m 上的 Goroutine 的调度。
func dropg() {
_g_ := getg()
setMNoWB(&_g_.m.curg.m, nil)
setGNoWB(&_g_.m.curg, nil)
}
// setMNoWB 当使用 muintptr 不可行时,在没有 write barrier 下执行 *mp = new
//go:nosplit
//go:nowritebarrier
func setMNoWB(mp **m, new *m) {
(*muintptr)(unsafe.Pointer(mp)).set(new)
}
// setGNoWB 当使用 guintptr 不可行时,在没有 write barrier 下执行 *gp = new
//go:nosplit
//go:nowritebarrier
func setGNoWB(gp **g, new *g) {
(*guintptr)(unsafe.Pointer(gp)).set(new)
}
```
### M 的死亡
我们已经多次提到过 m 当且仅当它所运行的 Goroutine 被锁定在该 m 且 Goroutine 退出后, m 才会退出。我们来看一看它的原因。
首先,我们已经知道调度循环会一直进行下去永远不会返回了:
```
func mstart() {
(...)
mstart1() // 永不返回
(...)
mexit(osStack)
}
```
那`mexit`究竟什么时候会被执行? 事实上,在`mstart1`中:
```
func mstart1() {
(...)
// 为了在 mcall 的栈顶使用调用方来结束当前线程,做记录
// 当进入 schedule 之后,我们再也不会回到 mstart1,所以其他调用可以复用当前帧。
save(getcallerpc(), getcallersp())
(...)
}
```
`save`记录了调用方的 pc 和 sp,而对于`save`:
```
// getcallerpc 返回它调用方的调用方程序计数器 PC program conter
// getcallersp 返回它调用方的调用方的栈指针 SP stack pointer
// 实现由编译器内建,在任何平台上都没有实现它的代码
//
// 例如:
//
// func f(arg1, arg2, arg3 int) {
// pc := getcallerpc()
// sp := getcallersp()
// }
//
// 这两行会寻找调用 f 的 PC 和 SP
//
// 调用 getcallerpc 和 getcallersp 必须被询问的帧中完成
//
// getcallersp 的结果在返回时是正确的,但是它可能会被任何随后调用的函数无效,
// 因为它可能会重新定位堆栈,以使其增长或缩小。一般规则是,getcallersp 的结果
// 应该立即使用,并且只能传递给 nosplit 函数。
//go:noescape
func getcallerpc() uintptr
//go:noescape
func getcallersp() uintptr // implemented as an intrinsic on all platforms
// save 更新了 getg().sched 的 pc 和 sp 的指向,并允许 gogo 能够恢复到 pc 和 sp
//
// save 不允许 write barrier 因为 write barrier 会破坏 getg().sched
//
//go:nosplit
//go:nowritebarrierrec
func save(pc, sp uintptr) {
_g_ := getg()
// 保存当前运行现场
_g_.sched.pc = pc
_g_.sched.sp = sp
_g_.sched.lr = 0
_g_.sched.ret = 0
// 保存 g
_g_.sched.g = guintptr(unsafe.Pointer(_g_))
// 我们必须确保 ctxt 为零,但这里不允许 write barrier。
// 所以这里只是做一个断言
if _g_.sched.ctxt != nil {
badctxt()
}
}
```
由于`mstart/mstart1`是运行在 g0 上的,因此`save`将保存`mstart`的运行现场保存到`g0.sched`中。 当调度循环执行到`goexit0`时,会检查 m 与 g 之间是否被锁住:
```
func goexit0(gp *g) {
(...)
gfput(_g_.m.p.ptr(), gp)
if locked {
if GOOS != "plan9" {
gogo(&_g_.m.g0.sched)
}
}
schedule()
}
```
如果 g 锁在当前 m 上,则调用`gogo`恢复到`g0.sched`的执行现场,从而恢复到`mexit`调用。
最后来看`mexit`:
```
// mexit 销毁并退出当前线程
//
// 请不要直接调用来退出线程,因为它必须在线程栈顶上运行。
// 相反,请使用 gogo(&_g_.m.g0.sched) 来解除栈并退出线程。
//
// 当调用时,m.p != nil。因此可以使用 write barrier。
// 在退出前它会释放当前绑定的 P。
//
//go:yeswritebarrierrec
func mexit(osStack bool) {
g := getg()
m := g.m
if m == &m0 {
// 主线程
//
// 在 linux 中,退出主线程会导致进程变为僵尸进程。
// 在 plan 9 中,退出主线程将取消阻塞等待,即使其他线程仍在运行。
// 在 Solaris 中我们既不能 exitThread 也不能返回到 mstart 中。
// 其他系统上可能发生别的糟糕的事情。
//
// 我们可以尝试退出之前清理当前 M ,但信号处理非常复杂
handoffp(releasep()) // 让出 P
lock(&sched.lock) // 锁住调度器
sched.nmfreed++
checkdead()
unlock(&sched.lock)
notesleep(&m.park) // 暂止主线程,在此阻塞
throw("locked m0 woke up")
}
sigblock()
unminit()
// 释放 gsignal 栈
if m.gsignal != nil {
stackfree(m.gsignal.stack)
}
// 将 m 从 allm 中移除
lock(&sched.lock)
for pprev := &allm; *pprev != nil; pprev = &(*pprev).alllink {
if *pprev == m {
*pprev = m.alllink
goto found
}
}
// 如果没找到则是异常状态,说明 allm 管理出错
throw("m not found in allm")
found:
if !osStack {
// Delay reaping m until it's done with the stack.
//
// If this is using an OS stack, the OS will free it
// so there's no need for reaping.
atomic.Store(&m.freeWait, 1)
// Put m on the free list, though it will not be reaped until
// freeWait is 0. Note that the free list must not be linked
// through alllink because some functions walk allm without
// locking, so may be using alllink.
m.freelink = sched.freem
sched.freem = m
}
unlock(&sched.lock)
// Release the P.
handoffp(releasep())
// After this point we must not have write barriers.
// Invoke the deadlock detector. This must happen after
// handoffp because it may have started a new M to take our
// P's work.
lock(&sched.lock)
sched.nmfreed++
checkdead()
unlock(&sched.lock)
if osStack {
// Return from mstart and let the system thread
// library free the g0 stack and terminate the thread.
return
}
// mstart is the thread's entry point, so there's nothing to
// return to. Exit the thread directly. exitThread will clear
// m.freeWait when it's done with the stack and the m can be
// reaped.
exitThread(&m.freeWait)
}
```
可惜`exitThread`在 darwin 上还是没有定义:
```
// 未在 darwin 上使用,但必须定义
func exitThread(wait *uint32) {
}
```
在 Linux amd64 上:
```
// func exitThread(wait *uint32)
TEXT runtime·exitThread(SB),NOSPLIT,$0-8
MOVQ wait+0(FP), AX
// 栈使用完毕
MOVL $0, (AX)
MOVL $0, DI // exit code
MOVL $SYS_exit, AX
SYSCALL
// 甚至连栈都没有了
INT $3
JMP 0(PC)
```
从实现上可以看出,只有 linux 中才可能正常的退出一个栈,而 darwin 只能保持暂止了。 而如果是主线程,则会始终保持 park。
## 小结
我们已经看过了整个调度器的设计,图 1 纵观了整个调度循环:
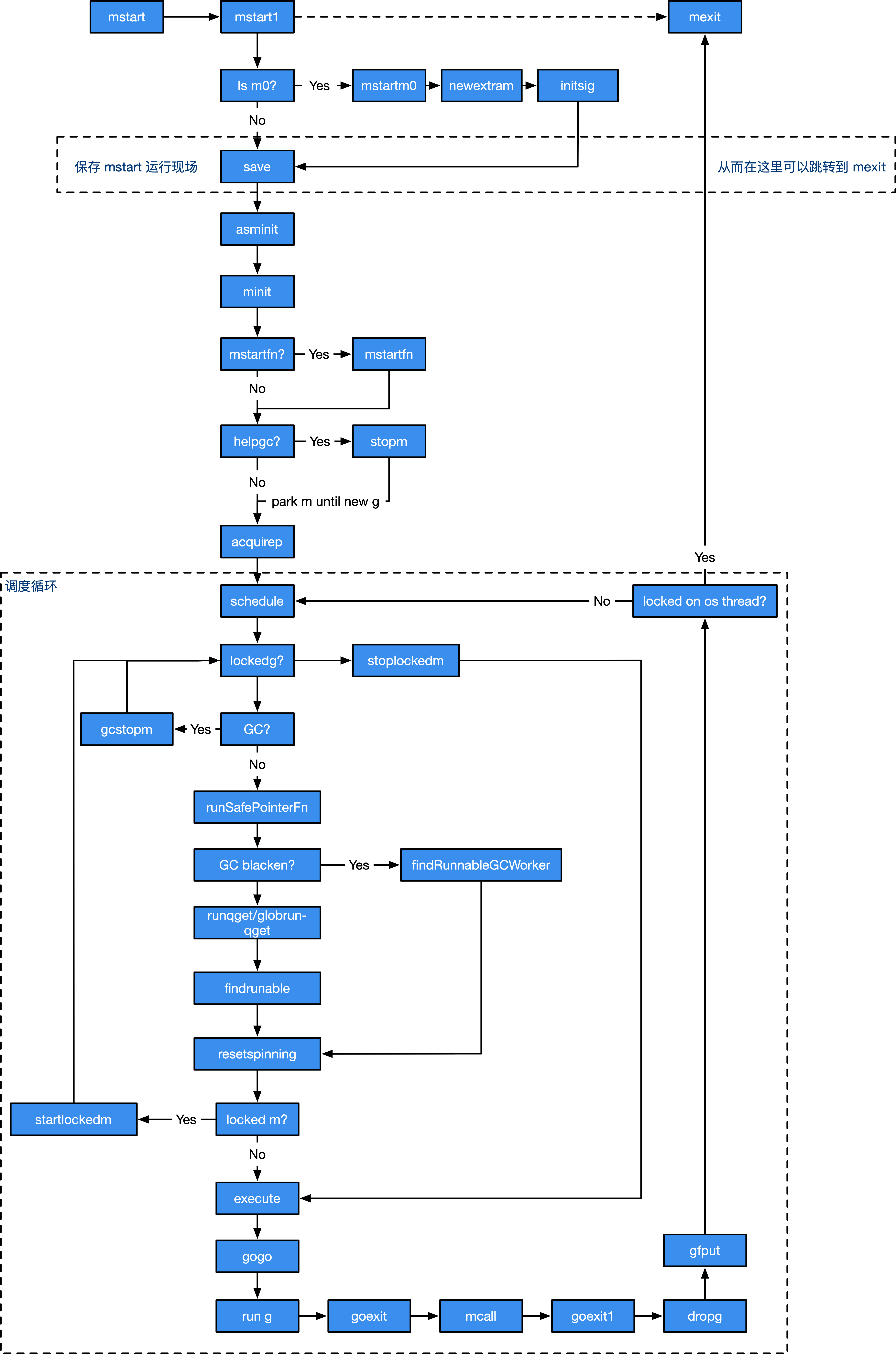**图 1:调度器调度循环纵览**
那么,很自然的能够想到这个流程中存在两个问题:
1. `findRunnableGCWorker`在干什么?
2. 调度循环看似合理,但如果 G 执行时间过长,难道要等到 G 执行完后再调度其他的 G?显然不符合实际情况,那么到底会发生什么事情?
- 第一部分 :基础篇
- 第1章 Go语言的前世今生
- 1.2 Go语言综述
- 1.3 顺序进程通讯
- 1.4 Plan9汇编语言
- 第2章 程序生命周期
- 2.1 从go命令谈起
- 2.2 Go程序编译流程
- 2.3 Go 程序启动引导
- 2.4 主Goroutine的生与死
- 第3 章 语言核心
- 3.1 数组.切片与字符串
- 3.2 散列表
- 3.3 函数调用
- 3.4 延迟语句
- 3.5 恐慌与恢复内建函数
- 3.6 通信原语
- 3.7 接口
- 3.8 运行时类型系统
- 3.9 类型别名
- 3.10 进一步阅读的参考文献
- 第4章 错误
- 4.1 问题的演化
- 4.2 错误值检查
- 4.3 错误格式与上下文
- 4.4 错误语义
- 4.5 错误处理的未来
- 4.6 进一步阅读的参考文献
- 第5章 同步模式
- 5.1 共享内存式同步模式
- 5.2 互斥锁
- 5.3 原子操作
- 5.4 条件变量
- 5.5 同步组
- 5.6 缓存池
- 5.7 并发安全散列表
- 5.8 上下文
- 5.9 内存一致模型
- 5.10 进一步阅读的文献参考
- 第二部分 运行时篇
- 第6章 并发调度
- 6.1 随机调度的基本概念
- 6.2 工作窃取式调度
- 6.3 MPG模型与并发调度单
- 6.4 调度循环
- 6.5 线程管理
- 6.6 信号处理机制
- 6.7 执行栈管理
- 6.8 协作与抢占
- 6.9 系统监控
- 6.10 网络轮询器
- 6.11 计时器
- 6.12 非均匀访存下的调度模型
- 6.13 进一步阅读的参考文献
- 第7章 内存分配
- 7.1 设计原则
- 7.2 组件
- 7.3 初始化
- 7.4 大对象分配
- 7.5 小对象分配
- 7.6 微对象分配
- 7.7 页分配器
- 7.8 内存统计
- 第8章 垃圾回收
- 8.1 垃圾回收的基本想法
- 8.2 写屏幕技术
- 8.3 调步模型与强弱触发边界
- 8.4 扫描标记与标记辅助
- 8.5 免清扫式位图技术
- 8.6 前进保障与终止检测
- 8.7 安全点分析
- 8.8 分代假设与代际回收
- 8.9 请求假设与实务制导回收
- 8.10 终结器
- 8.11 过去,现在与未来
- 8.12 垃圾回收统一理论
- 8.13 进一步阅读的参考文献
- 第三部分 工具链篇
- 第9章 代码分析
- 9.1 死锁检测
- 9.2 竞争检测
- 9.3 性能追踪
- 9.4 代码测试
- 9.5 基准测试
- 9.6 运行时统计量
- 9.7 语言服务协议
- 第10章 依赖管理
- 10.1 依赖管理的难点
- 10.2 语义化版本管理
- 10.3 最小版本选择算法
- 10.4 Vgo 与dep之争
- 第12章 泛型
- 12.1 泛型设计的演进
- 12.2 基于合约的泛型
- 12.3 类型检查技术
- 12.4 泛型的未来
- 12.5 进一步阅读的的参考文献
- 第13章 编译技术
- 13.1 词法与文法
- 13.2 中间表示
- 13.3 优化器
- 13.4 指针检查器
- 13.5 逃逸分析
- 13.6 自举
- 13.7 链接器
- 13.8 汇编器
- 13.9 调用规约
- 13.10 cgo与系统调用
- 结束语: Go去向何方?