
# 6.3 topic in roscpp
## 6.3.1 Topic通信
Topic是ROS里一种异步通信的模型,一般是节点间分工明确,有的只负责发送,有的只负责接收处理。对于绝大多数的机器人应用场景,比如传感器数据收发,速度控制指令的收发,Topic模型是最适合的通信方式。
为了讲明白topic通信的编程思路,我们首先来看`topic_demo`中的代码,这个程序是一个消息收发的例子:**自定义一个类型为gps的消息(包括位置x,y和工作状态state信息),一个node以一定频率发布模拟的gps消息,另一个node接收并处理,算出到原点的距离。**
源代码见`ROS-Academy-for-Beginners/topic_demo`
## 6.3.2 创建gps消息
在代码中,我们会用到自定义类型的gps消息,因此就需要来自定义gps消息,在msg路径下创建`gps.msg`:
见`topic_demo/msg/gps.msg`
```
string state #工作状态
float32 x #x坐标
float32 y #y坐标
```
以上就定义了一个gps类型的消息,你可以把它理解成一个C语言中的结构体,类似于
```cpp
struct gps
{
string state;
float32 x;
float32 y;
}
```
在程序中对一个gps消息进行创建修改的方法和对结构体的操作一样。
当你创建完了msg文件,记得修改`CMakeLists.txt`和`package.xml`,从而让系统能够编译自定义消息。
在`CMakeLists.txt`中需要改动
```cmake
find_package(catkin REQUIRED COMPONENTS
roscpp
std_msgs
message_generation #需要添加的地方
)
add_message_files(FILES gps.msg)
#catkin在cmake之上新增的命令,指定从哪个消息文件生成
generate_messages(DEPENDENCIES std_msgs)
#catkin新增的命令,用于生成消息
#DEPENDENCIES后面指定生成msg需要依赖其他什么消息,由于gps.msg用到了flaot32这种ROS标准消息,因此需要再把std_msgs作为依赖
```
`package.xml`中需要的改动
```xml
<build_depend>message_generation</build_depend>
<run_depend>message_runtime</run_depend>
```
当你完成了以上所有工作,就可以回到工作空间,然后编译了。编译完成之后会在`devel`路径下生成`gps.msg`对应的头文件,头文件按照C++的语法规则定义了`topic_demo::gps`类型的数据。
要在代码中使用自定义消息类型,只要`#include <topic_demo/gps.h>`,然后声明,按照对结构体操作的方式修改内容即可。
```cpp
topic_demo::gps mygpsmsg;
mygpsmsg.x = 1.6;
mygpsmsg.y = 5.5;
mygpsmsg.state = "working";
```
## 6.3.3 消息发布节点
定义完了消息,就可以开始写ROS代码了。通常我们会把消息收发的两端分成两个节点来写,一个节点就是一个完整的C++程序。
见`topic_demo/src/talker.cpp`
```cpp
#include <ros/ros.h>
#include <topic_demo/gps.h> //自定义msg产生的头文件
int main(int argc, char **argv)
{
ros::init(argc, argv, "talker"); //用于解析ROS参数,第三个参数为本节点名
ros::NodeHandle nh; //实例化句柄,初始化node
topic_demo::gps msg; //自定义gps消息并初始化
...
ros::Publisher pub = nh.advertise<topic_demo::gps>("gps_info", 1); //创建publisher,往"gps_info"话题上发布消息
ros::Rate loop_rate(1.0); //定义发布的频率,1HZ
while (ros::ok()) //循环发布msg
{
... //处理msg
pub.publish(msg);//以1Hz的频率发布msg
loop_rate.sleep();//根据前面的定义的loop_rate,设置1s的暂停
}
return 0;
}
```
机器人上几乎所有的传感器,几乎都是按照固定频率发布消息这种通信方式来传输数据,只是发布频率和数据类型的区别。
## 6.3.4 消息接收节点
见`topic_demo/src/listener.cpp`
```cpp
#include <ros/ros.h>
#include <topic_demo/gps.h>
#include <std_msgs/Float32.h>
void gpsCallback(const topic_demo::gps::ConstPtr &msg)
{
std_msgs::Float32 distance; //计算离原点(0,0)的距离
distance.data = sqrt(pow(msg->x,2)+pow(msg->y,2));
ROS_INFO("Listener: Distance to origin = %f, state: %s",distance.data,msg->state.c_str()); //输出
}
int main(int argc, char **argv)
{
ros::init(argc, argv, "listener");
ros::NodeHandle n;
ros::Subscriber sub = n.subscribe("gps_info", 1, gpsCallback); //设置回调函数gpsCallback
ros::spin(); //ros::spin()用于调用所有可触发的回调函数,将进入循环,不会返回,类似于在循环里反复调用spinOnce()
//而ros::spinOnce()只会去触发一次
return 0;
}
```
在topic接收方,有一个比较重要的概念,就是**回调(CallBack)**,在本例中,回调就是预先给`gps_info`话题传来的消息准备一个回调函数,你事先定义好回调函数的操作,本例中是计算到原点的距离。只有当有消息来时,回调函数才会被触发执行。具体去触发的命令就是`ros::spin()`,它会反复的查看有没有消息来,如果有就会让回调函数去处理。
因此千万不要认为,只要指定了回调函数,系统就回去自动触发,你必须`ros::spin()`或者`ros::spinOnce()`才能真正使回调函数生效。
## 6.3.5 CMakeLists.txt文件修改
在`CMakeLists.txt`添加以下内容,生成可执行文件
```cmake
add_executable(talker src/talker.cpp) #生成可执行文件talker
add_dependencies(talker topic_demo_generate_messages_cpp)
#表明在编译talker前,必须先生编译完成自定义消息
#必须添加add_dependencies,否则找不到自定义的msg产生的头文件
#表明在编译talker前,必须先生编译完成自定义消息
target_link_libraries(talker ${catkin_LIBRARIES}) #链接
add_executable(listener src/listener.cpp ) #声称可执行文件listener
add_dependencies(listener topic_demo_generate_messages_cpp)
target_link_libraries(listener ${catkin_LIBRARIES})#链接
```
以上cmake语句告诉catkin编译系统如何去编译生成我们的程序。这些命令都是标准的cmake命令,如果不理解,请查阅cmake教程。
之后经过`catkin_make`,一个自定义消息+发布接收的基本模型就完成了。
## 扩展:回调函数与spin()方法
回调函数在编程中是一种重要的方法,在维基百科上的解释是:
```
In computer programming, a callback is any executable code that is passed as an argument to other code, which is expected to call back (execute) the argument at a given time.
```
回调函数作为参数被传入到了另一个函数中(在本例中传递的是函数指针),在未来某个时刻(当有新的message到达),就会立即执行。Subscriber接收到消息,实际上是先把消息放到一个**队列**中去,如图所示。队列的长度在Subscriber构建的时候设置好了。当有spin函数执行,就会去处理消息队列中队首的消息。

spin具体处理的方法又可分为阻塞/非阻塞,单线程/多线程,在ROS函数接口层面我们有4种spin的方式:
| spin方法 | 阻塞 | 线程 |
| :------: | :------: | :------: |
| `ros::spin()` | 阻塞 | 单线程|
| `ros::spinOnce()` |非阻塞 | 单线程 |
| `ros::MultiThreadedSpin()` | 阻塞 | 多线程 |
| `ros::AsyncMultiThreadedSpin()` | 非阻塞 |多线程 |
阻塞与非阻塞的区别我们已经讲了,下面来看看单线程与多线程的区别:
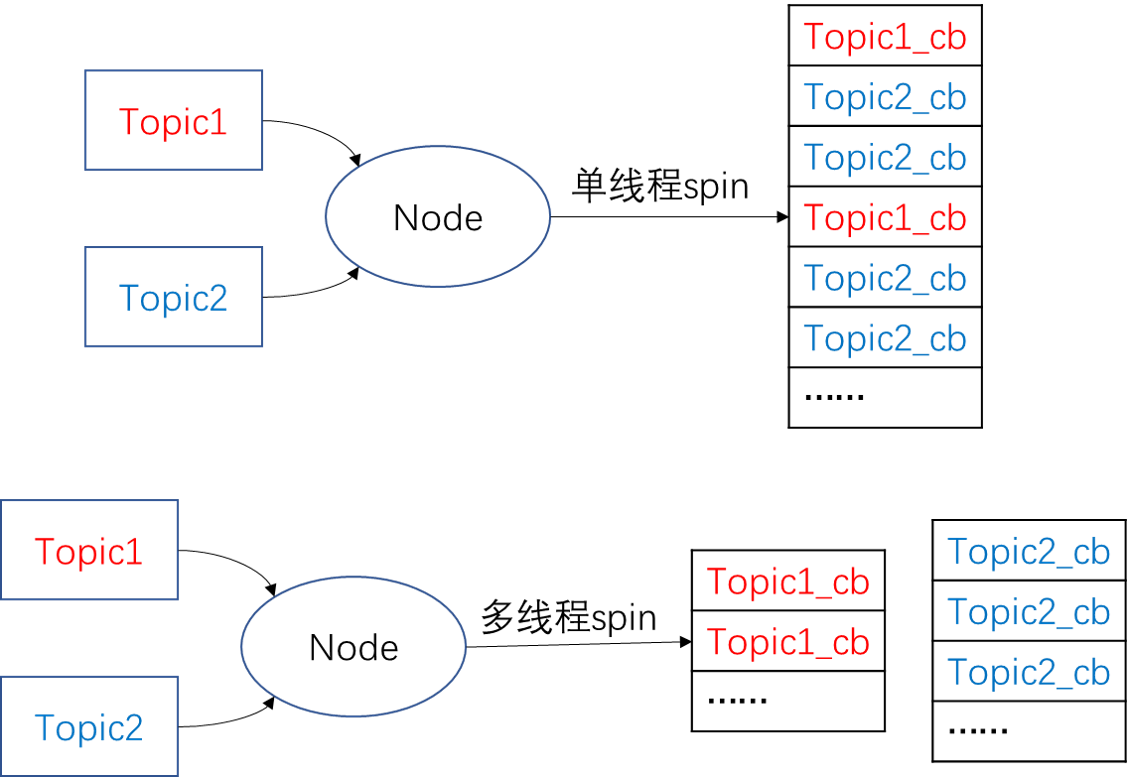
我们常用的`spin()`、`spinOnce()`是单个线程逐个处理回调队列里的数据。有些场合需要用到多线程分别处理,则可以用到`MultiThreadedSpin()`、`AsyncMultiThreadedSpin()`。
- 前言
- 第一章 ROS简介
- 机器人时代的到来
- ROS发展历程
- 什么是ROS
- 安装ROS
- 安装ROS-Academy-for-Beginners教学包
- 二进制与源码包
- 安装RoboWare Studio
- 单元测试一
- 第二章 ROS文件系统
- Catkin编译系统
- Catkin工作空间
- Package软件包
- CMakeLists.txt
- package.xml
- Metapacakge软件元包
- 其他常见文件类型
- 单元测试二
- 第三章 ROS通信架构(一)
- Node & Master
- Launch文件
- Topic
- Msg
- 常见msg类型
- 单元测试三
- 第四章 ROS通信架构(二)
- Service
- Srv
- Parameter server
- Action
- 常见srv类型
- 常见action类型
- 单元测试四
- 第五章 常用工具
- Gazebo
- RViz
- Rqt
- Rosbag
- Rosbridge
- moveit!
- 单元测试五
- 第六章 roscpp
- Client Library与roscpp
- 节点初始、关闭与NodeHandle
- Topic in roscpp
- Service in roscpp
- Param in roscpp
- 时钟
- 日志与异常
- 第七章 rospy
- Rospy与主要接口
- Topic in rospy
- Service in rospy
- Param与Time
- 第八章 TF与URDF
- 认识TF
- TF消息
- tf in c++
- tf in python
- 统一机器人描述格式
- 附录:TF数学基础
- 三维空间刚体运动---旋转矩阵
- 三维空间刚体运动---欧拉角
- 三维空间刚体运动---四元数
- 第九章 SLAM
- 地图
- Gmapping
- Karto
- Hector
- 第十章 Navigation
- Navigation Stack
- move_base
- costmap
- Map_server & Amcl
- 附录:Navigation工具包说明
- amcl
- local_base_planner
- carrot_planner
- clear_costmap_recovery
- costmap_2d
- dwa_local_planner
- fake_localization
- global_planner
- map_server
- move_base_msg
- move_base
- move_slow_and_clear
- navfn
- nav_core
- robot_pose_ekf
- rotate_recovery