
[TOC]
## 一、简介
### 1.1关于PicoBlaze
` `PicoBlaze 是 8 位微处理器,在 Xilinx 公司的 Virtex、Spartan-II 系列以上 FPGA 与
CoolRunner-II 系列以上的 CPLD 器件设计中以 IP 核的方式提供,使用是免费的 。对于用
FPGA 的 HDL 语言实现某些复杂的功能,会消耗大量的硬件资源,此时我们就会考虑用软件
的方式去搭建一个嵌入式系统,比如基于 MicroBlaze 的 8 位嵌入式系统。这样,我们就可
以使用轻量级的 PicoBlaze 实现。
` `常见的版本有 KCPSM3 和 KCPSM6。其中 KCPSM6 支持 7 系列的 Xilinx FPGA。PicoBlaze
非常小,只有一个 VHDL/Verilog 文件,KCPSM6 在 FPGA 中只需要 26 块逻辑单元 Slice,每
个指令都可以再 2 个时钟周期内完成,在 Spartan-6 中可以达到 105MHz 时钟频率(-2 速度
等级),在 Kintex-7(-3 速度等级)中能到达 238MHz。
### 1.2 接口说明
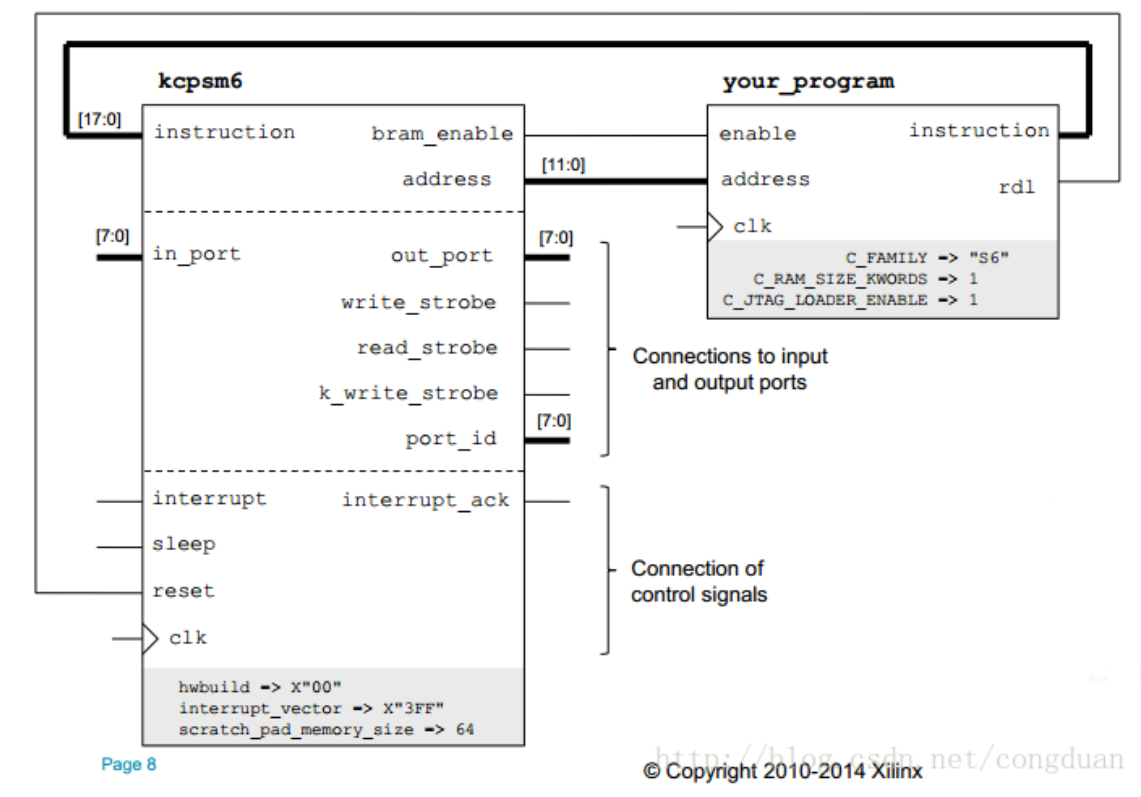
` `Kcpsm6 外部信号很少,常用的就是 in_port 和 out_port。地址线和 bram_enable 以及
instruction 信号与 FPGA rom 相连,总的框架如下,以 KCPSM6 为例:
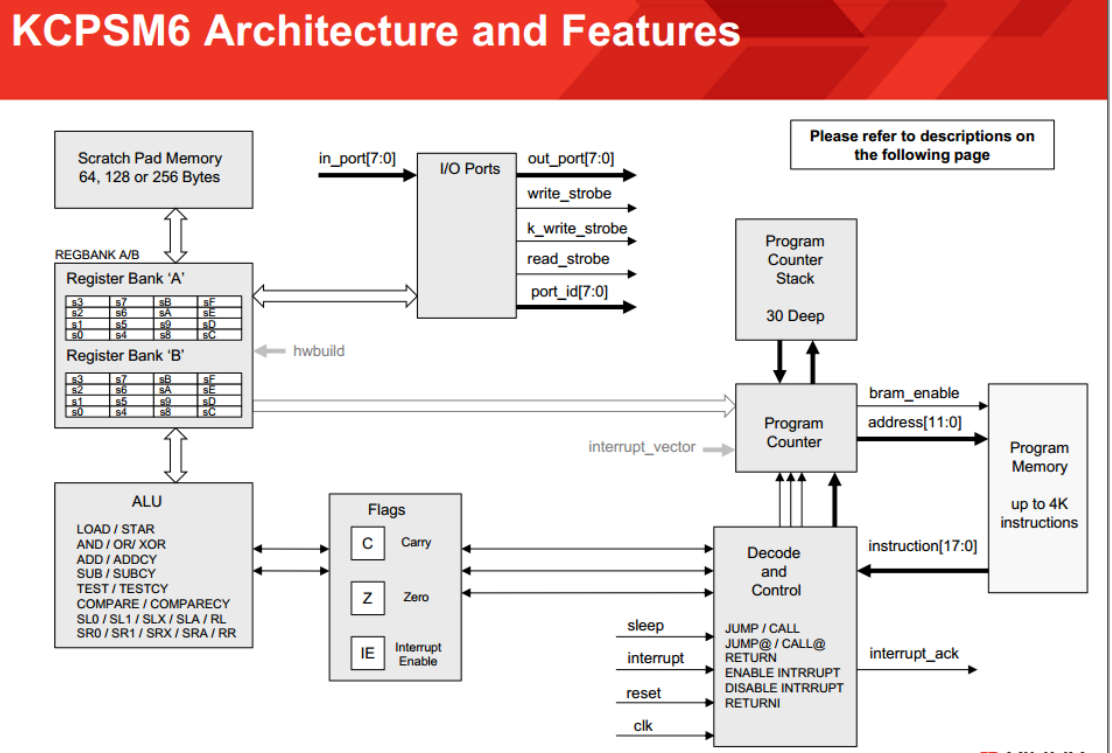
### 1.3 KCPSM6 的架构
` `具体架构如下,它能提供两个寄存器 Bank,每个 Bank 有 16 个寄存器。
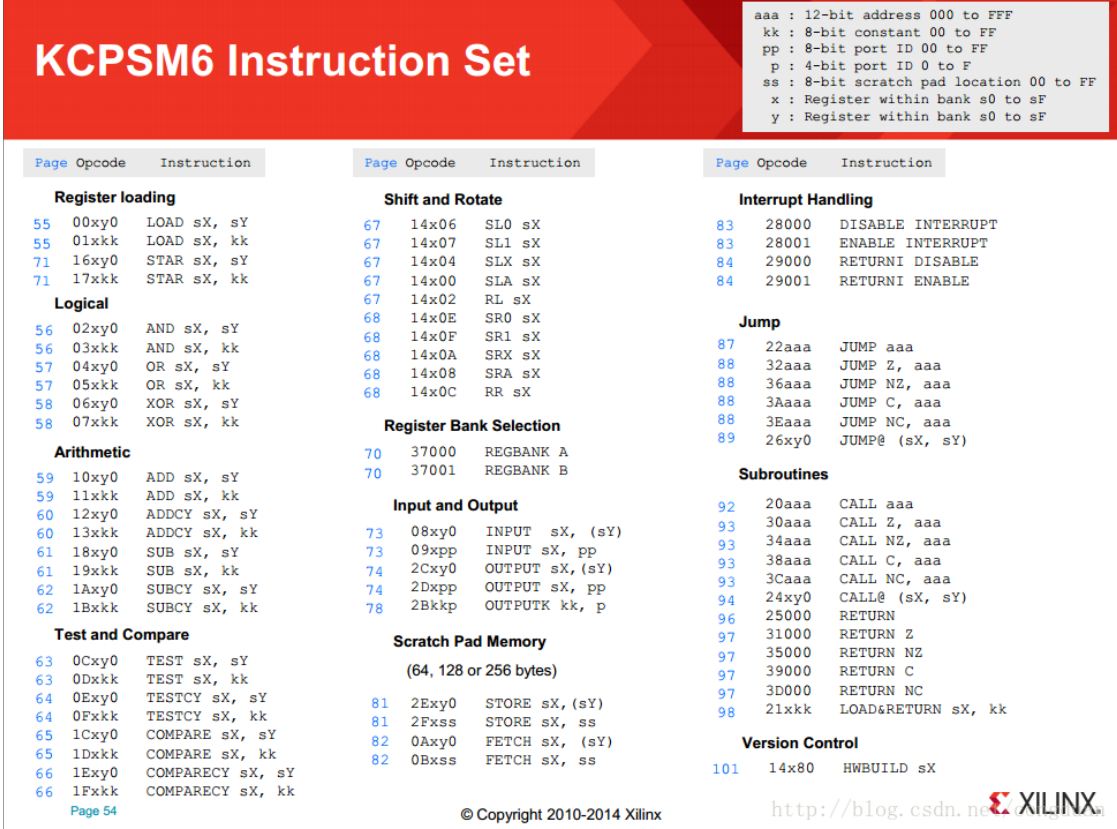
## 二、内部指令集 讲解
` `通常使用汇编语言写 PicoBlaze 程序,以 KCPSM6 为例,我们基于它的指令集可以很方
便实现一些简单的程序,指令集如下(具体指令在附录):
` `具体介绍下主要的输入输出端口的操作指令:
` `Input sx,sy; 将 inport 的数据传入 sx,sy 输出到 port_id
` `Output sx,sy; 将 sx 的数据传出至 out_port,sy 输出到 port_id
## 三、操作指引
### 3.1 概述
` `Xilinx 提供了相应的汇编器,可以生成带指令数据的 ROM 的 VHDL/Verilog 代码,也可
以生成 HEX 文件供动态加载到 RAM。
` `下面介绍开发流程,我们以一个简单的LED闪烁为例。
` `首先,我们去 Xilinx 官网下载所需的 KCPSM6 的相关文件以及辅助程序。下载地址:
http://www.xilinx.com/ipcenter/processor_central/picoblaze/member/
本文基于 zynq7020 进行试验,所以只需要下载 PicoBlaze for UltraScale, 7-series,
6-series FPGAs 即可。下载后解压出来,会有很多实例,JTAG_Loader 以及 kcpsm6.exe 汇
编器等。
### 3.2 生成微核
` `先在文本中编辑好一个汇编程序,保存后把后缀名改为.psm,然后写一个简单的代码,
将输入直接输出,如下图(.psm 代码):
```
;平台为zynq7系列,实现的功能是控制led灯,让其
;500mss翻转一次,系统时钟为50MHz
constant led_port,01 ;定义led_port为常量01
constant led_on,00000010'b ;
constant led_off,00000000'b ;
start:
load sF, led_on;
output sF,led_port ;led亮
CALL delay_500ms ;延时
load sF, led_off;
output sF,led_port ;led灭
CALL delay_500ms ;延时
jump start ;跳转的开始
; 500ms is 2,500,000 x 100ns (10,000,000 = 989680 hex)
;
delay_500ms: LOAD s2, 26
LOAD s1, 25
LOAD s0, a0
JUMP software_delay
software_delay: LOAD s0, s0 ;pad loop to make it 10 clock cycles (5 instructions),50MHz
SUB s0, 1'd
SUBCY s1, 0'd
SUBCY s2, 0'd
JUMP NZ, software_delay
RETURN
```
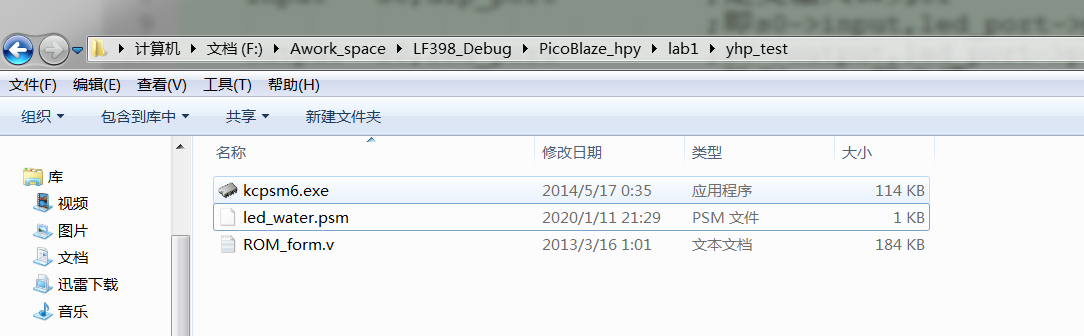
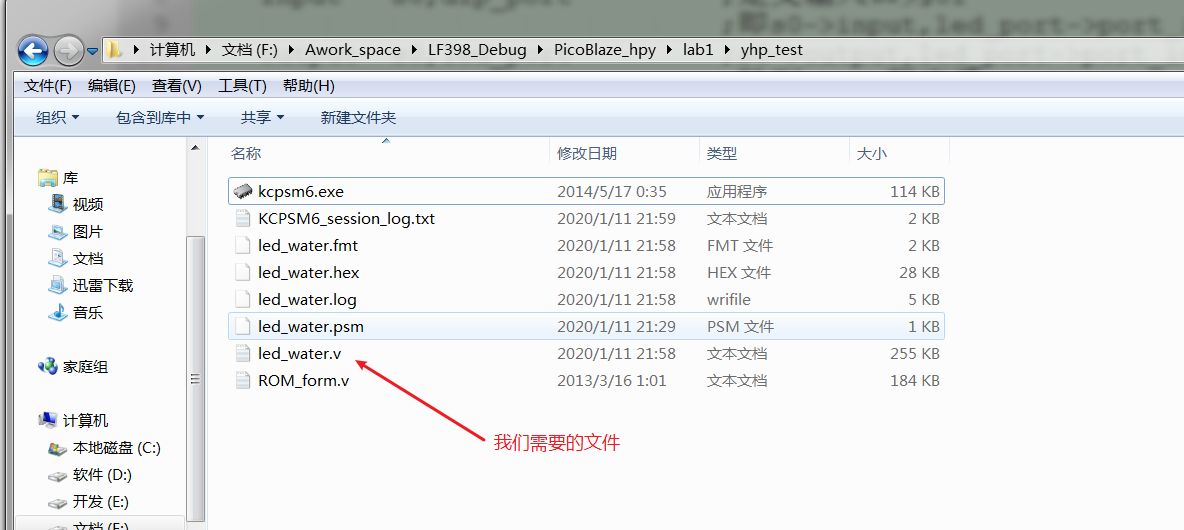
` `然后新建一个文件夹包含以下文件(如果缺少 ROM_form.v,是无法生成想要的文件的),
ROM_form.v使用下载文件中verilog文件夹下的,
将其拷贝就可。
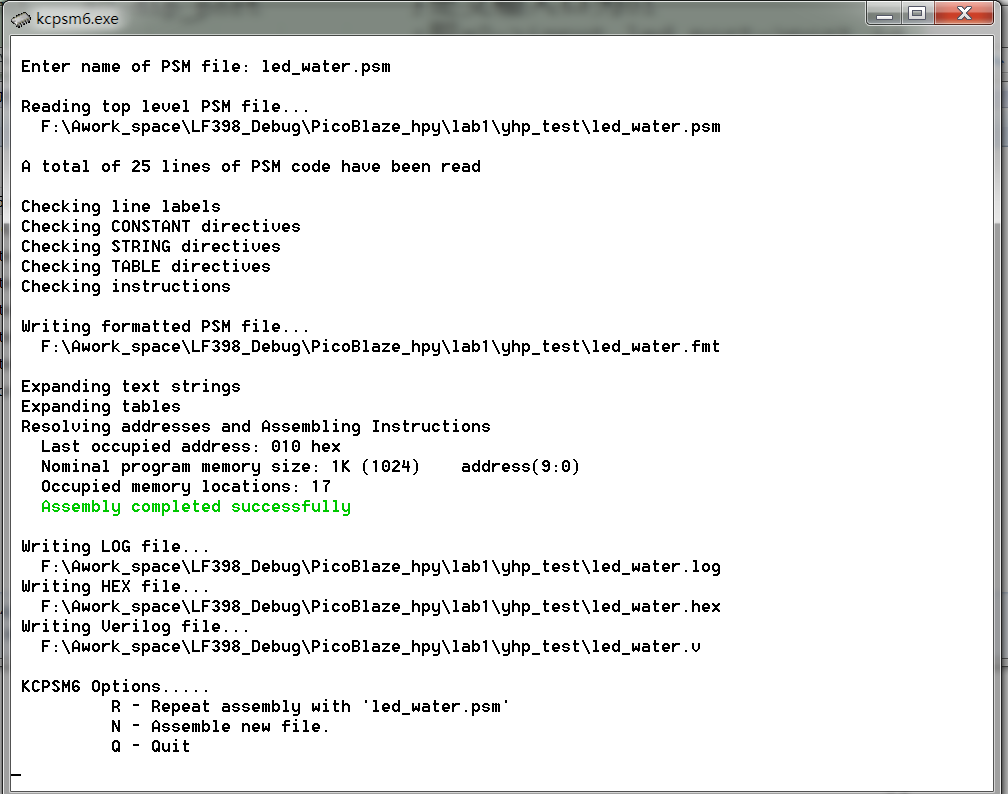
` `双击 kcpsm6.exe
` `回车,注意ROM_form.v一定要使用上问题到的那个,
不然不会生成.v文件。
### 3.3 建立工程
` `Kcpsm6 外部信号很少,常用的就是 in_port 和 out_port。地址线和 bram_enable 以及
instruction 信号与 FPGA rom 相连,在不使用中断和休眠信号的情况下将 interrupt 和
sleep 拉低即可。Clk 连接在 FPGA 外部输入的时钟引脚上,我们这里是 50MHz。本文使用
Verilog 语言实现硬件逻辑。
` `编写的顶层文件如下:
```
`timescale 1ns / 1ps
//////////////////////////////////////////////////////////////////////////////////
// Company:
// Engineer:
//
// Create Date: 2020/01/11 17:46:19
// Design Name:
// Module Name: top
// Project Name:
// Target Devices:
// Tool Versions:
// Description:
//
// Dependencies:
//
// Revision:
// Revision 0.01 - File Created
// Additional Comments:
//
//////////////////////////////////////////////////////////////////////////////////
module top(
input clk,
output reg led
);
wire [11:0] address ;
wire [17:0] instruction ;
wire bram_enable ;
reg [7:0] in_port ;
wire [7:0] out_port ;
wire [7:0] port_id ;
wire write_strobe ;
wire k_write_strobe ;
wire read_strobe ;
wire interrupt_ack ;
reg reset;
reg [31:0]cnt;
wire pcreset;
always@(posedge clk)
begin
if(cnt<=32'd5000)reset <= 1'b1;
else if(cnt<=32'd10000)reset <= 1'b0;
else reset <= 1'b1;
if(cnt>=32'd10001)cnt <= 32'd10001;
else cnt<=cnt + 1;
end
always@(posedge clk)
begin
if(!reset)begin
led <= 1'b0;
end
else begin
if(write_strobe)begin
if(port_id==8'h01)begin
led <= out_port[1];
end
end
end
end
(*dont_touch = "true"*)kcpsm6 #(
.interrupt_vector(12'h3ff),
.hwbuild(8'h00),
.scratch_pad_memory_size(64))
processor(
.address (address ),
.instruction (instruction ),
.bram_enable (bram_enable ),
.in_port (in_port ),
.out_port (out_port ),
.port_id (port_id ),
.write_strobe (write_strobe ),
.k_write_strobe (k_write_strobe ),
.read_strobe (read_strobe ),
.interrupt (1'b0 ),
.interrupt_ack (interrupt_ack ),
.sleep (1'b0 ),
.reset (pcreset ),
.clk (clk )
) ;
led_water #(
.C_JTAG_LOADER_ENABLE(0),
.C_FAMILY("7S"),
.C_RAM_SIZE_KWORDS(1))
program_rom(
.address (address),
.instruction (instruction),
.enable (bram_enable),
.clk (clk),
.rdl (pcreset)
);
endmodule
```
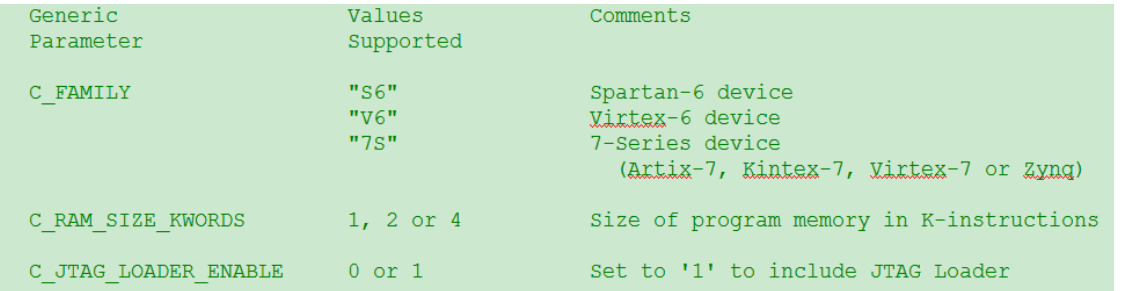
` `在例化模块时要根据自己的FPGA芯片,来使用不同的参数。
` `如图为 ROM_form.v
中对参数的介绍。
## 四、综合烧录
` `最后添加对应的引脚约束,编译成功后生成 top.bit,就按正常的烧写步骤把 bit 文件
烧录到板上即可。
- 序
- 第1章 Linux下开发FPGA
- 1.1 Linux下安装diamond
- 1.2 使用轻量级linux仿真工具iverilog
- 1.3 使用linux shell来读写串口
- 1.4 嵌入式上的linux
- 设备数教程
- linux C 标准库文档
- linux 网络编程
- 开机启动流程
- 1.5 linux上实现与树莓派,FPGA等通信的串口脚本
- 第2章 Intel FPGA的使用
- 2.1 特别注意
- 2.2 高级应用开发流程
- 2.2.1 生成二进制bit流rbf
- 2.2.2 制作Preloader Image
- 2.2.2.1 生成BSP文件
- 2.2.2.2 编译preloader和uboot
- 2.2.2.3 更新SD的preloader和uboot
- 2.3 HPS使用
- 2.3.1 通过JTAG下载代码
- 2.3.2 HPS软件部分开发
- 2.3 quartus中IP核的使用
- 2.3.1 Intel中RS232串口IP的使用
- 2.4 一些问题的解决方法
- 2.4.1 关于引脚的复用的综合出错
- 第3章 关于C/C++的一些语法
- 3.1 C中数组作为形参不传长度
- 3.2 汇编中JUMP和CALL的区别
- 3.3 c++中map的使用
- 3.4 链表的一些应用
- 3.5 vector的使用
- 3.6 使用C实现一个简单的FIFO
- 3.6.1 循环队列
- 3.7 C语言不定长参数
- 3.8 AD采样计算同频信号的相位差
- 3.9 使用C实现栈
- 3.10 增量式PID
- 第4章 Xilinx的FPGA使用
- 4.1 Alinx使用中的一些问题及解决方法
- 4.1.1 在Genarate Bitstream时提示没有name.tcl
- 4.1.2 利用verilog求位宽
- 4.1.3 vivado中AXI写DDR说明
- 4.1.4 zynq中AXI GPIO中断问题
- 4.1.5 关于时序约束
- 4.1.6 zynq的PS端利用串口接收电脑的数据
- 4.1.7 SDK启动出错的解决方法
- 4.1.8 让工具综合是不优化某一模块的方法
- 4.1.9 固化程序(双核)
- 4.1.10 分配引脚时的问题
- 4.1.11 vivado仿真时相对文件路径的问题
- 4.2 GCC使用Attribute分配空间给变量
- 4.3 关于Zynq的DDR写入byte和word的方法
- 4.4 常用模块
- 4.4.1 I2S接收串转并
- 4.5 时钟约束
- 4.5.1 时钟约束
- 4.6 VIVADO使用
- 4.6.1 使用vivado进行仿真
- 4.7 关于PicoBlaze软核的使用
- 4.8 vivado一些IP的使用
- 4.8.1 float-point浮点单元的使用
- 4.10 zynq的双核中断
- 第5章 FPGA的那些好用的工具
- 5.1 iverilog
- 5.2 Arduino串口绘图器工具
- 5.3 LabVIEW
- 5.4 FPGA开发实用小工具
- 5.5 Linux下绘制时序图软件
- 5.6 verilog和VHDL相互转换工具
- 5.7 linux下搭建轻量易用的verilog仿真环境
- 5.8 VCS仿真verilog并查看波形
- 5.9 Verilog开源的综合工具-Yosys
- 5.10 sublim text3编辑器配置verilog编辑环境
- 5.11 在线工具
- 真值表 -> 逻辑表达式
- 5.12 Modelsim使用命令仿真
- 5.13 使用TCL实现的个人仿真脚本
- 5.14 在cygwin下使用命令行下载arduino代码到开发板
- 5.15 STM32开发
- 5.15.1 安装Atollic TrueSTUDIO for STM32
- 5.15.2 LED闪烁吧
- 5.15.3 模拟U盘
- 第6章 底层实现
- 6.1 硬件实现加法的流程
- 6.2 硬件实现乘法器
- 6.3 UART实现
- 6.3.1 通用串口发送模块
- 6.4 二进制数转BCD码
- 6.5 基本开源资源
- 6.5.1 深度资源
- 6.5.2 FreeCore资源集合
- 第7章 常用模块
- 7.1 温湿度传感器DHT11的verilog驱动
- 7.2 DAC7631驱动(verilog)
- 7.3 按键消抖
- 7.4 小脚丫数码管显示
- 7.5 verilog实现任意人数表决器
- 7.6 基本模块head.v
- 7.7 四相八拍步进电机驱动
- 7.8 单片机部分
- 7.8.1 I2C OLED驱动
- 第8章 verilog 扫盲区
- 8.1 时序电路中数据的读写
- 8.2 从RTL角度来看verilog中=和<=的区别
- 8.3 case和casez的区别
- 8.4 关于参数的传递与读取(paramter)
- 8.5 关于符号优先级
- 第9章 verilog中的一些语法使用
- 9.1 可综合的repeat
- 第10章 system verilog
- 10.1 简介
- 10.2 推荐demo学习网址
- 10.3 VCS在linux上环境的搭建
- 10.4 deepin15.11(linux)下搭建system verilog的vcs仿真环境
- 10.5 linux上使用vcs写的脚本仿真管理
- 10.6 system verilog基本语法
- 10.6.1 数据类型
- 10.6.2 枚举与字符串
- 第11章 tcl/tk的使用
- 11.1 使用Tcl/Tk
- 11.2 tcl基本语法教程
- 11.3 Tk的基本语法
- 11.3.1 建立按钮
- 11.3.2 复选框
- 11.3.3 单选框
- 11.3.4 标签
- 11.3.5 建立信息
- 11.3.6 建立输入框
- 11.3.7 旋转框
- 11.3.8 框架
- 11.3.9 标签框架
- 11.3.10 将窗口小部件分配到框架/标签框架
- 11.3.11 建立新的上层窗口
- 11.3.12 建立菜单
- 11.3.13 上层窗口建立菜单
- 11.3.14 建立滚动条
- 11.4 窗口管理器
- 11.5 一些学习的脚本
- 11.6 一些常用的操作语法实现
- 11.6.1 删除同一后缀的文件
- 11.7 在Lattice的Diamond中使用tcl
- 第12章 FPGA的重要知识
- 12.1 面积与速度的平衡与互换
- 12.2 硬件原则
- 12.3 系统原则
- 12.4 同步设计原则
- 12.5 乒乓操作
- 12.6 串并转换设计技巧
- 12.7 流水线操作设计思想
- 12.8 数据接口的同步方法
- 第13章 小项目
- 13.1 数字滤波器
- 13.2 FIFO
- 13.3 一个精简的CPU( mini-mcu )
- 13.3.1 基本功能实现
- 13.3.2 中断添加
- 13.3.3 使用中断实现流水灯(实际硬件验证)
- 13.3.4 综合一点的应用示例
- 13.4.5 使用flex开发汇编编译器
- 13.4.5 linux--Flex and Bison
- 13.4 有符号数转单精度浮点数
- 13.5 串口调试FPGA模板