
【82.1 “阻塞”与“非阻塞”。】
做项目写程序,大框架大思路上就是在“阻塞”与“非阻塞”这两种模式下不断切换。“阻塞”可以理解成“单任务处理”模式,“非阻塞”可以理解成“多任务并行处理”模式。“阻塞”的优点是它全神贯注不分心地专注于当下这一件事,它等待某个事件的响应速度是最快的,同时省去了“来回切换、反复扫描”的额外开销,而且在编程思路上不用太费脑力只需“记流水账式”的编程即可,但是它的缺点是当下只能干一件事,其它事情无法兼顾,做不到多任务并行处理。而“非阻塞”恰恰相反,它的有优点就是“阻塞”的缺点,它的缺点就是“阻塞”的优点,对于“非阻塞”本节暂时不多讲。在实际项目中,有时候“大 阻塞”中分支了N个“小 非阻塞”,也有时候“大 非阻塞”中分支了N个“小 阻塞”。能在“阻塞”与“非阻塞”之间运用自如者,谓之神。
“阻塞等待”是指单片机在某个死循环里(比如“while(1)”这类)一直不断循环地在等待某个标志变量的状态,如果这个标志变量满足条件才会跳出这个死循环然后才能干其它的事情,否则一直在死循环里死等,给人一种全神贯注心无旁骛的感觉,
“阻塞延时”是指单片机在产生“延时时间”的时候做不了别的事,延时多久它就要被“阻塞”多久,只有延时过后它才能解脱去干别的事。比如,在编程上,常用for循环产生N个空指令来达到产生“延时时间”的目的,这种编程方式就是最常见的“阻塞延时”。
【82.2 Delay阻塞延时的一个例子。】
现在利用“Delay阻塞延时”编写一个练习程序,让一个LED灯闪烁。例子如下:
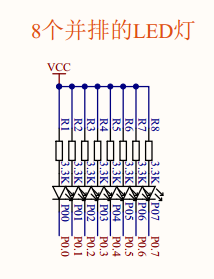
图82.2.1 灌入式驱动8个LED
\#include "REG52.H"
void Delay(unsigned long u32DelayTime); //函数的声明
sbit P0\_0=P0^0; //利用sbit和符号“^”的组合,把变量名字P0\_0与P0.0引脚关联起来
void Delay(unsigned long u32DelayTime) //产生“阻塞延时”的延时函数
{
static unsigned long i; //函数在频繁调用时,加static可以省去一条额外的初始化语句的开销。
for(i=0;i<u32DelayTime;i++);
}
void main()
{
while(1)
{
//第(1)步
P0\_0=0; //LED灯亮。
//第(2)步
Delay(5000); //这里就是阻塞延时,时间就越长,“亮”持续的时间就越长。
//第(3)步
P0\_0=1; //LED灯灭。
//第(4)步
Delay(5000); //这里就是阻塞延时,时间就越长,“灭”持续的时间就越长。
//第(5)步:这里已经触碰到主循环while(1)的“底线”,所以接着跳转到第(1)步继续循环
}
}
【82.3 累加型和累减型的两种Delay函数,哪家强?】
上述82.2例子中,用到一个Delay函数,该函数内部的for循环用的是“累加型”的,比如:
void Delay(unsigned long u32DelayTime)
{
static unsigned long i; //“累加型”函数内部多开销了一个变量i。
for(i=0;i<u32DelayTime;i++); //因为这里的“i++”是加法运算,所以称为“累加型”。
}
现在在跟大家分享一种“累减型”的Delay函数,例子如下:
void Delay(unsigned long u32DelayTime)
{
//“累减型”函数内部节省了一个变量i。
for(;u32DelayTime>0;u32DelayTime--); //“u32DelayTime--”意味着“累减型”。
}
仔细对比“累加型”和“累减型”,会发现在实现同样“阻塞延时”的功能下,因为“累减型”巧妙的借用了函数入口的局部变量u32DelayTime来充当for循环的变量,而省去了一个i变量。因此,“累减型”比“累加型”强一点。
【82.4 Delay函数让初学者容易犯的错误。】
初学者刚接触Delay函数,常常容易犯的错误就是忽略了for循环变量的类型,for循环变量的类型决定了你能输入的数值范围,比如上面例子中用到的是unsigned long变量,因此可以最大输入Delay(4294967295)。如果是unsigned int变量,最大可以输入Delay(65535)。如果是unsigned char变量,最大可以输入Delay(255)。
【82.5 Delay内部的for循环嵌套可产生无穷长的时间。】
刚才讲到,如果用最大的变量类型unsigned long ,最大的输入是Delay(4294967295),那么问题来,难道Delay函数的阻塞延时的时间有最大极限?其实不存在最大极限,理论上,你要多大的延时都可以,只需要在Delay函数内部用上for循环的嵌套,就可以产生“乘法级”的无穷长的时间,例子如下:
void Delay(unsigned long u32DelayTime)
{
static unsigned long i;
static unsigned long k;
for(i=0;i<u32DelayTime;i++)
{
for(k=0;k<5000;k++); //内部嵌套的for循环,意味着乘法的关系u32DelayTime的5000倍!
}
}
【82.6 “阻塞延时”与“非阻塞延时”的各自应用范围。】
“阻塞延时”一般应用在两个地方,一个是上电初始化进入主循环之前的延时,另一个是进入主循环之后,跟外部驱动芯片通信时候产生的时钟节拍小延时,而这个类延时一般是低于1ms的小延时。
“非阻塞延时”在项目中是被大量应用的,进入主循环之后,只要大于或等于1ms的延时,大多数都采样“非阻塞延时”,因为进入“任务框架级”的层面,只有“非阻塞延时”才能保证项目可以继续“多任务并行处理”。“非阻塞延时”的方式后续章节会讲到。
综上所述,1ms是“阻塞延时”与“非阻塞延时”的一个分界线,1ms这个时间不是绝对的,只是一个经验值。
- 首页
- 第一节:我的价值观
- 第二节:初学者的疑惑
- 第三节:单片机最重要的一个特性
- 第四节:平台软件和编译器软件的简介
- 第五节:用Keil2软件关闭,新建,打开一个工程的操作流程
- 第六节:把.c源代码编译成.hex机器码的操作流程
- 第七节:本节预留
- 第八节:把.hex机器码程序烧录到单片机的操作流程
- 第九节:本节预留
- 第十节:程序从哪里开始,要到哪里去?
- 第十一节:一个在单片机上练习C语言的模板程序
- 第十二节:变量的定义和赋值
- 【TODO】第十三节:赋值语句的覆盖性
- 【TODO】第十四节:二进制与字节单位,以及常用三种变量的取值范围
- 【TODO】第十五节:二进制与十六进制
- 【TODO】第十六节:十进制与十六进制
- 【TODO】第十七节:加法运算的5种常用组合
- 【TODO】第十八节:连加、自加、自加简写、自加1
- 【TODO】第十九节:加法运算的溢出
- 【TODO】第二十节:隐藏中间变量为何物?
- 【TODO】第二十一节:减法运算的5种常用组合。
- 【TODO】第二十二节:连减、自减、自减简写、自减1
- 【TODO】第二十三节:减法溢出与假想借位
- 【TODO】第二十四节:借用unsigned long类型的中间变量可以减少溢出现象
- 【TODO】第二十五节:乘法运算中的5种常用组合
- 【TODO】第二十六节:连乘、自乘、自乘简写,溢出
- 【TODO】第二十七节:整除求商
- 【TODO】第二十八节:整除求余
- 【TODO】第二十九节:“先余后商”和“先商后余”提取数据某位,哪家强?
- 【TODO】第三十节:逻辑运算符的“与”运算
- 【TODO】第三十一节:逻辑运算符的“或”运算
- 【TODO】第三十二节:逻辑运算符的“异或”运算
- 【TODO】第三十三节:逻辑运算符的“按位取反”和“非”运算
- 【TODO】第三十四节:移位运算的左移
- 【TODO】第三十五节:移位运算的右移
- 【TODO】第三十六节:括号的强制功能---改变运算优先级
- 【TODO】第三十七节:单字节变量赋值给多字节变量的疑惑
- 【TODO】第三十八节:第二种解决“运算过程中意外溢出”的便捷方法
- 【TODO】第三十九节:if判断语句以及常量变量的真假判断
- 【TODO】第四十节:关系符的等于“==”和不等于“!=”
- 【TODO】第四十一节:关系符的大于“>”和大于等于“>=”
- 【TODO】第四十二节:关系符的小于“<”和小于等于“<=”
- 【TODO】第四十三节:关系符中的关系符:与“&&”,或“||”
- 【TODO】第四十四节:小括号改变判断优先级
- 【TODO】第四十五节: 组合判断if...else if...else
- 【TODO】第四十六节: 一维数组
- 【TODO】第四十七节: 二维数组
- 【TODO】第四十八节: while循环语句
- 【TODO】第四十九节: 循环语句do while和for
- 【TODO】第五十节: 循环体内的continue和break语句
- 【TODO】第五十一节: for和while的循环嵌套
- 【TODO】第五十二节: 支撑程序框架的switch语句
- 【TODO】第五十三节: 使用函数的三要素和执行顺序
- 【TODO】第五十四节: 从全局变量和局部变量中感悟“栈”为何物
- 【TODO】第五十五节: 函数的作用和四种常见书写类型
- 【TODO】第五十六节: return在函数中的作用以及四个容易被忽略的功能
- 【TODO】第五十七节: static的重要作用
- 【TODO】第五十八节: const(./book/或code)在定义数据时的作用
- 【TODO】第五十九节: 全局“一键替换”功能的#define
- 【TODO】第六十节: 指针在变量(./book/或常量)中的基础知识
- 【TODO】第六十一节: 指针的中转站作用,地址自加法,地址偏移法
- 【TODO】第六十二节: 指针,大小端,化整为零,化零为整
- 【TODO】第六十三节: 指针“化整为零”和“化零为整”的“灵活”应用
- 【TODO】第六十四节: 指针让函数具备了多个相当于return的输出口
- 【TODO】第六十五节: 指针作为数组在函数中的入口作用
- 【TODO】第六十六节: 指针作为数组在函数中的出口作用
- 【TODO】第六十七节: 指针作为数组在函数中既“入口”又“出口”的作用
- 【TODO】第六十八节: 为函数接口指针“定向”的const关键词
- 【TODO】第六十九节: 宏函数sizeof(./book/)
- 【TODO】第七十节: “万能数组”的结构体
- 【TODO】第七十一节: 结构体的内存和赋值
- 【TODO】第七十二节: 结构体的指针
- 【TODO】第七十三节: 结构体数据的传输存储和还原
- 【TODO】第七十四节: 结构体指针在函数接口处的频繁应用
- 【TODO】第七十五节: 指针的名义(例:一维指针操作二维数组)
- 【TODO】第七十六节: 二维数组的指针
- 【TODO】第七十七节: 指针唯一的“单向输出”通道return
- 【TODO】第七十八节: typedef和#define和enum
- 【TODO】第七十九节: 各种变量常量的命名规范
- 【TODO】第八十节: 单片机IO口驱动LED
- 【TODO】第八十一节: 时间和速度的起源(指令周期和晶振频率)
- 【TODO】第八十二节: Delay“阻塞”延时控制LED闪烁
- 【TODO】第八十三节: 累计主循环的“非阻塞”延时控制LED闪烁
- 【TODO】第八十四节: 中断与中断函数
- 【TODO】第八十五节: 定时中断的寄存器配置
- 【TODO】第八十六节: 定时中断的“非阻塞”延时控制LED闪烁
- 【TODO】第八十七节: 一个定时中断产生N个软件定时器
- 【TODO】第八十八节: 两大核心框架理论(四区一线,switch外加定时中断)
- 【TODO】第八十九节: 跑马灯的三种境界
- 【TODO】第九十节: 多任务并行处理两路跑马灯
- 【TODO】第九十一节: 蜂鸣器的“非阻塞”驱动
- 【TODO】第九十二节: 独立按键的四大要素(自锁,消抖,非阻塞,清零式滤波)
- 【TODO】第九十三节: 独立按键鼠标式的单击与双击
- 【TODO】第九十四节: 两个独立按键构成的组合按键
- 【TODO】第九十五节: 两个独立按键的“电脑键盘式”组合按键
- 【TODO】第九十六节: 独立按键“一键两用”的短按与长按
- 【TODO】第九十七节: 独立按键按住不松手的连续均匀触发
- 【TODO】第九十八节: 独立按键按住不松手的“先加速后匀速”的触发
- 【TODO】第九十九节: “行列扫描式”矩阵按键的单个触发(原始版)
- 【TODO】第一百节: “行列扫描式”矩阵按键的单个触发(优化版)
- 【TODO】第一百零一节: 矩阵按键鼠标式的单击与双击
- 【TODO】第一百零二节: 两个“任意行输入”矩阵按键的“有序”组合触发
- 【TODO】第一百零三节: 两个“任意行输入”矩阵按键的“无序”组合触发
- 【TODO】第一百零四节: 矩阵按键“一键两用”的短按与长按
- 【TODO】第一百零五节: 矩阵按键按住不松手的连续均匀触发
- 【TODO】第一百零六节: 矩阵按键按住不松手的“先加速后匀速”触发
- 【TODO】第一百零七节: 开关感应器的识别与软件滤波
- 【TODO】第一百零八节: 按键控制跑马灯的启动和暂停和停止
- 【TODO】第一百零九节: 按键控制跑马灯的方向
- 【TODO】第一百一十节: 按键控制跑马灯的速度
- 第一百一十一节: 工业自动化设备的开关信号的运动控制
- 【TODO】第一百一十二节: 数码管显示的基础知识
- 【TODO】第一百一十三节: 动态扫描的数码管显示数字
- 【TODO】第一百一十四节: 动态扫描的数码管显示小数点
- 【TODO】第一百一十五节: 按键控制数码管的秒表
- 【TODO】第一百一十六节: 按键控制数码管的倒计时
- 【TODO】第一百一十七节: 按键切换数码管窗口来设置参数
- 【TODO】第一百一十八节: 按键让某位数码管闪烁跳动来设置参数
- 【TODO】第一百一十九节: 一个完整的人机界面的程序框架的脉络
- 【TODO】第一百二十节: 按键切换窗口切换局部来设置参数
- 【TODO】第一百二十一节: 可调参数的数码管倒计时
- 【TODO】第一百二十二节: 利用定时中断做的“时分秒”数显时钟
- 【TODO】第一百二十三节: 一种能省去一个lock自锁变量的按键驱动程序
- 【TODO】第一百二十四节: 数显仪表盘显示“速度、方向、计数器”的跑马灯
- 【TODO】第一百二十五节: “双线”的肢体接触通信
- 【TODO】第一百二十六节: “单线”的肢体接触通信
- 【TODO】第一百二十七节: 单片机串口接收数据的机制
- 【TODO】第一百二十八节: 接收“固定协议”的串口程序框架
- 【TODO】第一百二十九节: 接收带“动态密匙”与“累加和”校验数据的串口程序框架
- 【TODO】第一百三十节: 接收带“动态密匙”与“异或”校验数据的串口程序框架
- 【TODO】第一百三十一节: 灵活切换各种不同大小“接收内存”的串口程序框架
- 【TODO】第一百三十二节:“转发、透传、多种协议并存”的双缓存串口程序框架
- 【TODO】第一百三十三节:常用的三种串口发送函数
- 【TODO】第一百三十四节:“应用层半双工”双机串口通讯的程序框架